SLAM
1.[SLAM] 0. SLAM 공부 방법

수학선형대수학이상엽의 선형대수학의 유투브 강의 : 기초 배울 수 있다mathematics for machine learning : 수학과 타겟이라 조금 어렵다/ 난이도 높다확률과 통계 센서 정보를 활용하기 위해 , 베이즈 이론 관련을 공부하면 좋다computer vis
2.[SLAM] 1. Introduction
주변환경을 넘어서 더 넓은 공간을 볼 수 있다.차 위치를 정확하게 할 수 있다.2D image recognitionclassification : 분류detection : 객체 검출, 위치 segmetation : 픽셀이 어떤 객체를 의미하는지Video recogniti
3.[SLAM] 2. SLAM이란
slam은 어떤 기술인가, slam으로 어떤 문제를 풀 수 있을지 배운다. 1. SLAM? Simultaneous Localization and Mapping의 약자 동시적 위치 추정 및 지도 작성 SLAM은 원래 로봇 기술로부터 출발했다. 지도 : 공간 표현 (물체를
4.[SLAM] 3. SLAM의 종류
1. SLAM에서 사용할 수 있는 센서 Sensor proprioceptive sensor : 자기 자신의 움직임 감지 exteroceptive sensor : 외부 정보 감지 이 두개를 조합하여 최적의 위치, 지도 정보를 추정하는 것이 SLAM 모든 센서는 노이즈를
5.[SLAM] 4. SLAM 기술의 적용
로봇 청소기초음파 센서를 통해 가까운 벽 인식탐색 작업 : 집의 구조 확인 + 최소 거리를 움직여서 map을 완성해라active SLAM : SLAM + path planning 동시에과거에는 2D 라이다를 사용했는데 최근은 천장, 전방 카메라, 라이다, 레이더 다 사
6.[SLAM] 5. 3D 회전과 이동
강체3D 공간 속에 물체의 위치를 x,y,z로 표현할 수 있다.위치와 방향성도 가지고 있다. pose = Position + Orientationposition = (tx, ty, tz)orientation = (Rx, Ry, Rz)6 DoF = 3D orientaio
7.[SLAM] 6. 동차좌표계
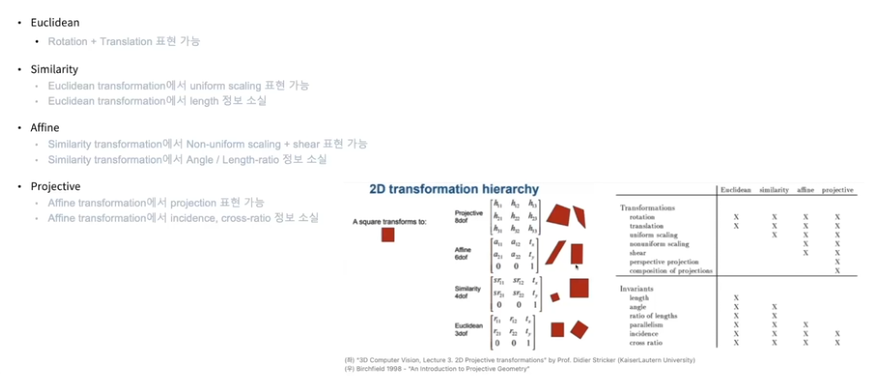
사영 기하학3D 세상은 유클리디안 geometry를 따른다두 직선이 평행 = 절대 만나지 않는다 = 유클리유클리디 기하학에서 두 직선이 평행 = 무한의 거리에서 두 선이 교차한다.무한을 숫자로 표현할 수 없다평행, 교차의 개념은 동시에 표현될 수 없다사진 속에서 철도는
8.[SLAM] 7. 핀홀 카메라 투영
중요하다!!과거의 첫 사진기바늘구멍 사진기의 2가지 원리빛은 직선으로 이동한다 (물체가 거꾸로 맺힌다)상 맺힘light controlhardware 처리(전처리) : 노출시간, aperture(조리개, 구멍) 크기를 통해 조절software 처리(후처리) : ISO g
9.[SLAM] 8. 카메라 센서의 구조
1. 카메라란? light-capturing device camera == a light measuring device 좋은 카메라 : 물리적인 빛을 정확하게 담는 카메라 Steps to capture light light -> color filter -> photo
10.[SLAM] 9. 특징점 기술의 역사
SIFT, ORB 등 특징점 기술의 역사
11.[SLAM] 10. TDD
Test Driven Development 방법
12.[SLAM] 11. Profiler
easy profiler 사용 방법
13.[SLAM] 12. Logger and CI CD

Logger and CI/CD
14.[SLAM] 13. Epipolar Geometry
Epipolar geometry란 무엇인가
15.[SLAM] 14. RANSAC
RANSAC 알고리즘
16.[SLAM] 15. Triangulation
3D 위치를 알기 위한 Triangulation
17.[SLAM] 16. Perspective n points
Perspective n points 방법을 통한 3D 위치 예측
18.[SLAM] 17. 최소자승법
최적의 방법을 찾는 Least squares & SLAM의 종류
19.[SLAM] 18. Loop Closure
최적화하는 Loop Closure
20.[SLAM] 19. Bundle Adjustment
Bundle Adjustment
21.[SLAM] 20. Modern VSLAM
Modern VSLAM
22.[SLAM] 21. Feature based SLAM의 역사
Feature based SLAM의 역사
23.[SLAM] 22. Direct SLAM의 역사
Direct SLAM의 역사
24.[SLAM] 23. Visual-Inertial Odometry (VIO)의 역사
Visual-Inertial Odometry (VIO)의 역사
25.[SLAM] 24. Visual Odometrym (Part 1) - Scaramuzza
Visual Odometrym (Part 1) - Scaramuzza 논문 리뷰
26.[SLAM] 25. Visual Odometrym (Part 2) - feature
Visual Odometrym (Part 2) - feature
27.[SLAM] 26. PTAM
Parallel Tracking and Mapping 0. Abstract handled camera 사용 작은 공간에서 AR를 위해 만든 것 thread를 나눠서 사용 tracking 3D map 이렇게 해서 batch optimization(BA) 사용 가능
28.[SLAM] 27. ORB SLAM 논문 리뷰
ORB slam 논문 리뷰