1. Feature Selection and Matching
- feature, correspondence를 찾는 2가지 방법
- feature를 찾고 그 다음에 track
- optical flow 또는 template matching 방법
- local search technique이라고 한다
- view point가 매우 가까울 때 사용하면 좋다
- 각각의 이미지에서 feature를 다 뽑고 나서 그 다음에 descriptor를 siminality metric 기반으로 match
- description 방식
- 큰 motion에 대해 적합 (keyframe, loop closure 상황)
- feature를 찾고 그 다음에 track
1-1. Feature Detection
- local feature = 주변보다 intensity, color, texture가 두드러지는 부분
- point detector, corner, blob를 기반으로 VO를 많이 한다
좋은 feature detector의 특징
- localization 정확도
- repeatability (view point가 바뀌어도 잘 검출되어야한다)
- 효율성
- robustness : noise, 압축, blur에 대해
- distinctiveness : 다른 이미지에서 동일하게 뽑을 수 있는지
- invariance : 조명
- geometric change : 회전, scale, 변화
- harris, shi-tomaxi, FAST, SIFT
corner와 blob detector의 차이
- corner detector
- 빠르다
- less distinctive
- image position localization을 잘한다
- scale 변화에는 약하다
- blob detector
- more distinctive
- 느리다
- scale 또는 view 변화에 강인
2 stage of feature detector
- feature response function
- feature인가 아닌가
- harris corner 에서는 cornerness를 구한다
- SIFT에서는 DoG를 구한다
- nonmaxima suppression
- strong corner point를 찾기 위해
- 여러개 중에 대표적인것 하나를 뽑는다
SIFT
- DoG를 사용해서 여러 scale에서 특징 뽑는다
- 여러 scale에서 local minima, maxima를 뽑는다
SURF
- DoG를 box filter를 통해 더 빠르게 추출한다
1-2. Feature Descriptor
- descriptor가 나오기 전에 사용한 방식
- sum of squared differences (SSDs)
- normalized cross correlation (NCC)
- template tracking에서 많이 사용
- NCC가 SSDs보다 좋다
- NCC는 매우 가볍다
- 방향, 조명, scale이 바뀌면 이 방법들을 사용할 수 없다
- SIFT descriptor
- histogram of local gradient orientations 방식
- 조명, 회전, scale, view point가 60도 이상 변화해도 가능
- BRIEF
- 밝기값을 비교해서 binary descriptor를 만들고 hamming 거리로 비교
- 추출. 비교가 빠르다
- ORB
- orientation invariant
- BRISK
- 요즘은 딥러닝을 많이 사용한다
1-3. Feature Matching
- SSD 또는 NCC 방법으로 similarity 방식으로 비교
mutual consistency check
- 두 이미지에서 각각 feature를 뽑는다
- descriptor를 비교하는데 비교하는 point 순서가 중요하다
- 순서에 따라 결과가 바뀔 수 있다
- 다음 이미지의 feature를 먼저 선점해버리면 진짜 match되는 point가 다른 point로 match
- 이 문제를 해결하기 위해 한번 더한다
- 첫번쨰 이미지에서 match 수행 후 두번째 이미지에서 match를 한번 더 수행
- 그러면 동일하게 match되는 경우가 발생 -> 이것들만 정확하다고 판단
Constrained Matching
- 두 개의 vector를 다 비교하는 것은 이기 때문에 느릴 수 있다
- 빨리 계산하는 방법은 hash table, multimensional search tree를 사용하는 방법이 있다
- 실제 VO에서 쓰이는 방법은 motion model 사용하는 것
- motion model : 첫번째에서 두번째 이미지로 가는 R, t의 초기값을 알 수 있다면 point를 예측하여 사용할 수 있다
- 두 feature correspondence를 사용해서 E matrix를 구하고 거기서 R, t를 구하는데 초기에 R, t를 어떻게 알 수 있나?
- imu, wheel odometry, laser, GPS를 사용해서 알 수 있다
- 또는 constant velocity model을 사용할 수 있다
- constant velocity model : 짧은 시간동안 급격하게 motion이 바뀌지 않을 것이다. 대략적인 위치에 들어올거다라고 예측
- 자동차의 경우 wheel odometry를 사용하면 좋다
- epipolar matching
- stereo에서는 rectification
- 두개의 이미지의 feature가 epipolar line에 위치하도록
- matching은 빨라지는데 image warping(GPU에서)을 해야한다
1-4. Feature Tracking
- detect-then-track
- 이미지 relative model이 작은 경우에만 사용 가능
- 이미지 사이의 거리가 길어질수록 tracking이 잘 안된다
- 그래서 Kalnade Lucas Tomasi(KLT) tracker를 사용
1-5. Discussion
SIFT Matching
- distance-ratio test(Lowe's test)
- 비슷하게 생긴 feature가 있을 경우 match를 하지 않는다
- 비슷한 feature 간의 거리가 threshold보다 큰 경우만 선택한다
- 즉, ratio가 작은 경우에만 선택 (ratio가 1이면 거의 같은 거리)
Lines and Edgelets
- point만 사용하는 것이 아니라 line, edge, plane을 사용가능
- 자율주행에는 line을 사용하는 경우가 있다
- 주차하는 경우
- 벽은 서로 90도 라는 점 이용
- line의 경우 가려지는 경우(occluded)가 있으면 쉽지 않다
- 지금은 딥러닝 기술이 좋아져서 가려져도 추론할 수 있다
Number of Features and Distribution
- feature를 몇개, 어떻게 뽑아야하는가
- feature를 많이 뽑는게 좋은 편이다
- 이미지에서 균일하게 뽑는게 좋다. grid로 나눠서 균일하게.
- feature 수, grid의 크기를 조절한다
Dense and Correspondence-Free Methods
- Correspondence-Free : Correspondence 사용하지 않는 방법
- optical flow, feature-less method와 같은 dense mothod 사용 가능
- frame간의 작은 motion이 있을때만 가능
- feature-less method
- direct 방식
- low texture image에서도 가능
- 계산량이 많다 + 부정확 (전체 이미지 사용)
- 이후에는 발전해서 실시간으로 가능해졌다 (sparse한 이미지 사용)
2. outlier Removal
- robust estimation 중에 m-estimation 기법
- inlier가 outlier보다 많을 때만 가능
2-1. RANSAC
- outlier가 많아도 가능
- ramdom으로 데이터를 뽑아서 가설을 만들고 나머지 데이터로 검증
- 그 후 가장 높은 합의도를 얻은 모델이 채택
- N : 반복 횟수
- : inlier와 outlier의 비율 -> 알기 어렵다
- 원하는 비율로 일단 설정한다
- 그후 구해진 N에 1.5배와 같이 수를 곱하여 많이 반복되도록 사용
- 추가로 early stop 방법을 사용
- nondeterministic : 돌릴때마다 다른 값이 나온다 (확률적으로 푸는 방법이기 때문)
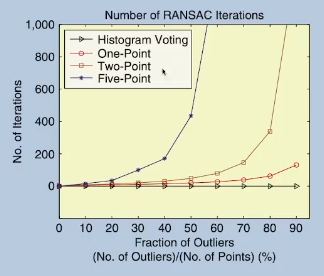
2-2. Minimal Model Parameterizations
-
N의 수가 적을수록 반복되는 수가 적기 때문에 좋다
-
하지만 N은 s(sampling point 수)와 관련이 있다
-
s보다 N은 커야한다
-
Minimal 파라미터 of the model이 중요해지고 있다
-
모델 파라미터를 줄여서 iteration 수를 줄였다
2-3. reducing the iterations of RANSAC
- RANSAC의 속도를 높이는 방법
2.4 Is It Really Better to Use a Minimal Set in RANSAC
- 안정성에 대한것
- 속도 제한이 있는 경우 minimal point set을 쓰는 것이 좋다
- 근데 꼭 그게 아닐 수도 있다
- 5 point 방법도 outlier가 많으면 좋은 방법은 아닐 수 있다
- minimal set을 쓰는 것보다 많은 데이터셋을 사용하는 것이 좋다
- 많은 데이터셋을 쓰게 되면 노이즈가 평균이 되어 많이 상쇄된다
- 구현할 때 봐야할 점
- 우선 속도에 중점을 맞춰서 minimal set을 사용
- RANSAC도 사용
3. Error Propagation
- 누적되는 error를 어떻게 할 것 인가?
- transformation의 부정확함은 camera geometry와 image feature에서 나타난다
- camera geometry : intrinsixc, extrinsic, RANSAC, minimal solve estimation
- feature : detector의 localization 정확도, descriptor, matching
- covariance matrix로 표현 가능
4. Camera pose Optimization
- 이전 n개의 시간을 고려하여 추정 -> sliding window BA
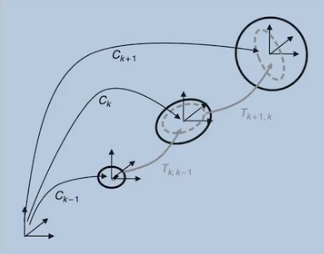
4-1. Pose-Graph Optimization
- node : camera pose
- edge : rigid body transformation
- 이전 카메라 pose에 transformation을 적용하여 현재 pose를 예측하고 그 값과 실제 현재 pose의 차이를 제곱하여 cost function으로 사용
- rotations이 비선형이기 때문에 nonlinear cost functino을 사용
loop constraint
- loop constraint의 경우 시작과 끝이 drift로 인해 동일하지 않다
- loop detection
- loop constraint을 만드는 방법
- 다시 돌아왔다는 의미
- visual similarity 계산해서 구한다
- global image descriptor : BoW 방법
- local image descriptor : descriptor 비교
- visaul word -> visual vocabulary
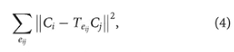
4-2. Windowed(or local) Bundle Adjustment
- Pose-Graph Optimization와 다르다
- Pose-Graph Optimization는 pose와 transformation만 있다
- pose는 최적화가 잘 된다
- 하지만 landmark와는 안 맞는다
- BA보다 매우 빠르다
- pose만 관심이 있다면 사용하면 좋다
- 최적화 방법 2가지
- 방법1
- pose, landmark 동시에 최적화 -> BA 방법
- 방법2
- pose 먼저한 후 landmark 최적화
- n개의 이미지를 통해 최적화 수행 (n개의 keyframe)
- X : landmark
- C : pose
- g : reprojection 수식
- p : pixel
- reprojection error가 nonlinear -> nonlinear optimization 사용해야한다
- 초기값이 실제 최적값과 가까워야한다
- 2개의 view Vo 결과를 사용 -> E/F를 RANSAC에 돌린 결과가 필요
- BA를 진행하면 drift가 줄어든다
- window BA -> real time을 위한 것
5. applications
- VO를 사용하는 곳
- 우주, 땅, 해저 로봇
- 드론
- 자동차 : ADAS
