- 중요하다!!
1.camera obscura to modern camera
camera obscura
- 과거의 첫 사진기
- 바늘구멍 사진기의 2가지 원리
- 빛은 직선으로 이동한다 (물체가 거꾸로 맺힌다)
- 상 맺힘
modern camera
- light control
- hardware 처리(전처리) : 노출시간, aperture(조리개, 구멍) 크기를 통해 조절
- software 처리(후처리) : ISO gain (을 높여서 빛의 양 증폭), normalization (이미지 밝기값 평평하게 조절 가능)
- focal point (초점)
- lens
- obscura와 같은 원리이다!
2. Camera projection
수학적 원리
- 3D에서 2D로 공간 매핑
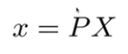
- X : 3d world coordinate points
- P : projection matrix (3d -> 2d로 공간 매핑해주는 matrix)
- x : 2d image coordinate points
camera projection의 단계
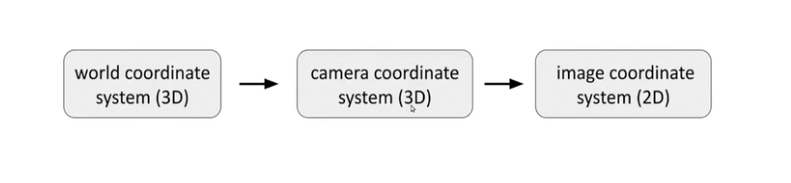
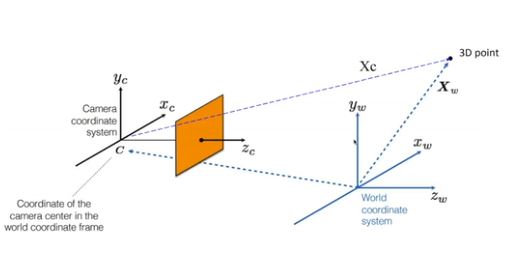
1. world cordinate system(3d) -> camera coordinate system(3d)
2. camera coordinate system(3d) -> image coordinate system(2d)
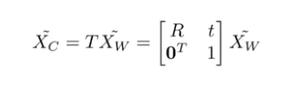
단계 1. world cordinate(3d) -> camera coordinate(3d) transformation
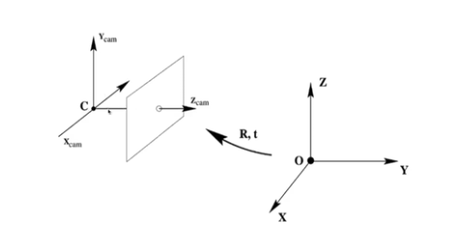
- 왼쪽 : camera frame
- 오른쪽 : world frame
- 둘다 3d이기 때문에 world에서 camera로의 이동을 rigid body motion으로 표현할 수 있다
- rotation : 3x3 matrix(SO(3))
- translation : 3x1 vector
- transformtaion : 4x4 matrix(SE(3))
- world에 관한 정보는 다 제거된다
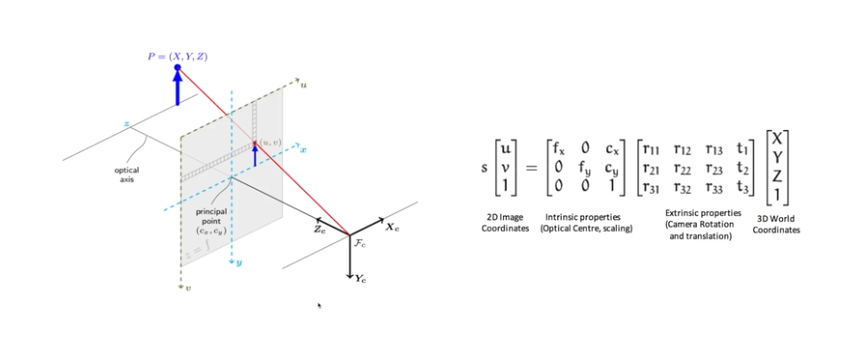
단계 2. camera coordinate(3d) -> image coordinate(2d) transformation
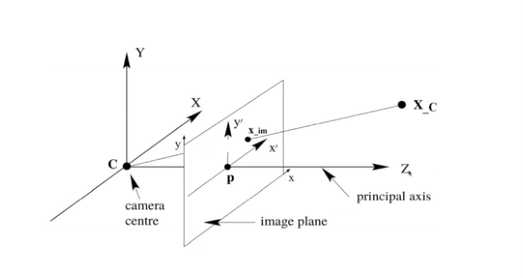
- z 축이 카메라 전방을 의미
- 이미지 plane의 영점은 p (principal point)
- x_c를 camera center(c)와 이으면 image plane을 통과하는 부분이 x_im
- x_im을 수식적으로 정확하게 표현하는 것이 camera projection 의 목표
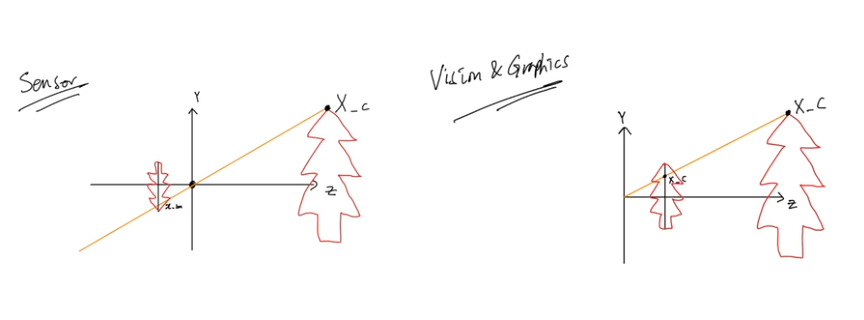
- 실제 작동 원리는 왼쪽이지만 관용적으로 오른쪽으로 사용한다
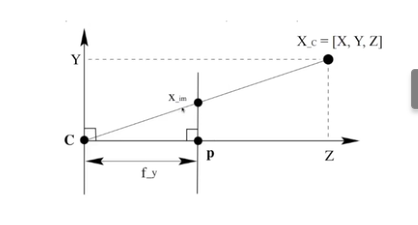
- 목표는 x_im 찾는것
- 방법은 두개의 닮은꼴 삼각형을 활용하여 비율로써 찾는다
- f_y : focal length, focal point(c)와 가상 image plane간의 거리
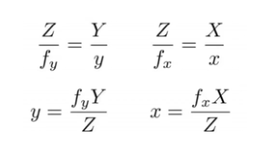
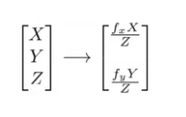
- 3D좌표를 2D좌표로 변경
- 여전히 C를 기준으로 x,y를 표현하고 있다(픽셀 단위가 아니다)
- 지금은 중앙이 영점인데 이미지의 경우 좌측상단이 (0,0)이 되어야한다
- 이미지의 중앙을 옮기자! image coordinate 중심점을 중앙에서 좌측 위로 옮긴다.
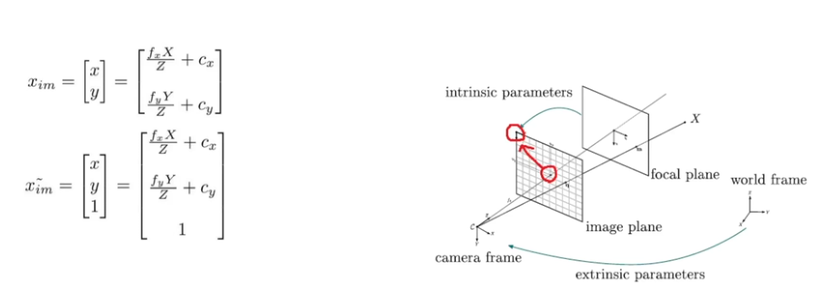
- 이미지 좌측 위부터 중앙까지의 거리를 알면 옮길 수 있다
- 보통 중앙점을 principle point라고 한다
- 하지만 완벽하게 중앙에 있지는 한다(센서가 조금씩 틀어져있을 수 있어 오차가 존재한다. 이는 카메라 캘리브레이션으로 측정할 수 있다.)

- 뒤에서 부터 보면 된다
전체
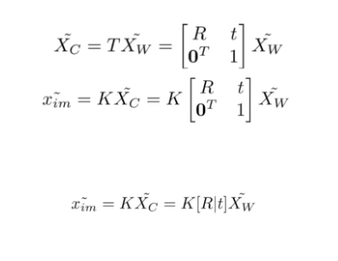
- K : 카메라 내부 파라미터 의미, intrinsic matrix
- Rt : 외부 world에 대한 파라미터 의미, extrinsic matrix