ROS
1.[ROS] ROS 기초(1) ROS란?

ROS 공식 홈페이지오픈소스 로봇 운영체제로봇 소프트웨어를 개발하는데 필요한 소프트웨어 프레임워크소프트웨어 모듈 + 라이브러리 집합 + 도구 집합자동차 제어를 위한 미들웨어(OS 위에서 돌아가는 SW)로봇 SW를 만들기 위한 코드의 재사용이 용이한 환경 제공이 목표다양
2.[ROS] ROS 기초(2) 통신

ROS에서의 통신 통신 = 노드(node) 간 토픽(topic)의 발행 & 구독(publish & subscribe) 기반의 메시지 교환 ROS를 사용하면 서로 다른 기종 간에 메시지 교환 가능 노드간 통신을 기반으로 전체 시스템을 구동 HW 부품, SW 모듈에
3.[ROS] ROS 명령어
ROS 쉘 명령어 roscd [package_name] 지정한 ros package folder로 이동 rosls ros package file 목록 확인 rosed : ros package file 편집 roscp : ros package file 복사
4.[ROS] Ubuntu 18.04 ROS 설치 방법

ROS 설치 http://wiki.ros.org/melodic/Installation/Ubuntu 여기 링크에서 명령어 복사해서 입력하면 된다. (난 이걸 모르고 하나씩 다 입력했다...) 해당 문서와 아래 작업 순서가 조금 다를 수 있지만 상관없다. 0. ubun
5.[ROS] workspace 생성 & 작업 환경 설정
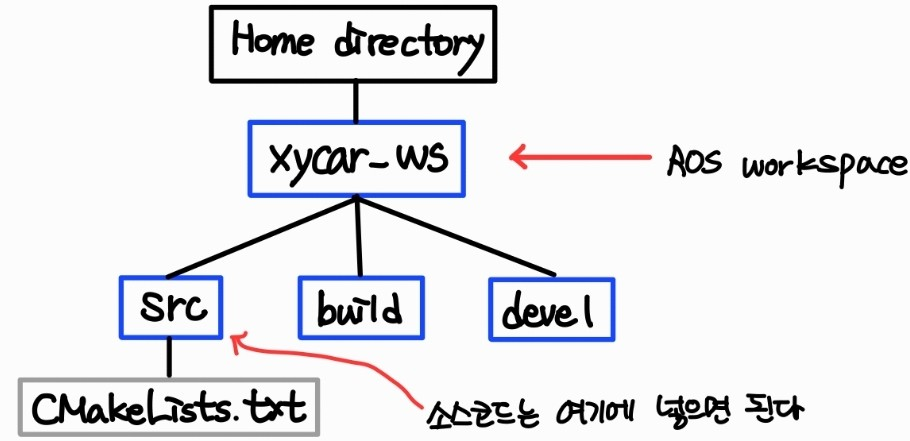
1. 워크 스페이스 생성 catkin_make : workspace에서 새로운 소스코드 파일이나 패키지가 만들어 지면 (수정하면) 빌드해야 한다. 2. ROS 작업 환경 설정 (환경변수 설정) 1. home 디렉토리의 .bachrc 파일 수정 2. 저장 후 나가기
6.[ROS] turtlesim 사용해서 키보드로 거북이 이동시키기
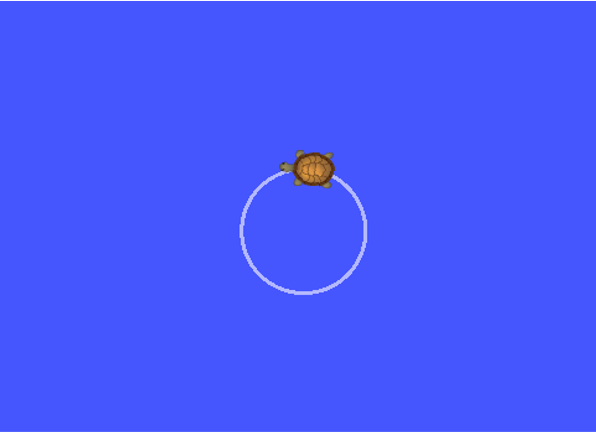
4. 거북이 node 실습 terminal 1 에서 마스터 실행 terminal 4에서 ros node 확인 terminal 2에서 turtlesim 패키지의 turtlesim_node 실행 terminal 4에서 ros node 확인 (turtlesim이 추가
7.[ROS] 노드와 토픽 정리
속도, 조향각 명령을 subscribe 하는 노드노드명 : /xycar_motor토픽 : /xycar_motor토픽 타입 : xycar_msgs/xycar_motor메시지 타입토픽 : /scan토픽 : /xycar_ultrasonic토픽 : /usb_cam/image_
8.[ROS] ROS 순서대로 실행
ROS topic을 순서대로 실행하는 방법
9.[Ros] 초음파 센서 ROS 패키지 제작
초음파 센서를 사용하기 위해 ROS 패키지 만드는 방법
10.[ROS] TimeSlot 실습
timeslot 실습
11.[ROS] message의 크기와 전송 속도
message의 크기에 따른 전송 속도 차이 확인
12.[ROS] 프로그래밍 기초 1
ROS 패키지 만들기
13.[ROS] 프로그래밍 기초 2
roslaunch 실습
14.[ROS] 처리 지연 문제
topic을 처리하는 과정에서 처리 지연이 발생했을 경우 처리 방법
15.[ROS] RVIZ 기반 프로그래밍
RVIZ 기반으로 차량 주행
16.[ROS] node간 동기화 문제
node 간 동기화를 하는 방법
17.[ROS] RVIZ 라이다 센싱 데이터 시각화
RVIZ를 통해 라이다 센싱 데이터를 시각화하는 방법
18.[ROS] 노드 통신 프로그래밍 1
1:1 노트 통신 프로그래밍 1
19.[ROS] 노드 통신 프로그래밍 2
1:N, N:1, N:N 간의 노드 통신 프로그래밍
20.[ROS] 노드 통신 프로그래밍 3 : 나만의 메시지
나만의 메시지를 만들어서 통신하는 방법
21.[ROS] Topic 가공 후 재전송
받은 topic을 가공한 후 재전송하는 방법
22.[ROS] RVIZ 8자 주행 + LiDAR + IMU
RVIZ를 사용하여 8자 주행
23.[ROS] Range 메시지 RVIZ 시각화 + LiDAR data 활용
range 메시지를 활용하여 RVIZ 시각화
24.[ROS] 모터 제어 : 모형차 8자 주행
모터를 사용하여 모형차 8자 주행 수행
25.[ROS] 카메라를 활용한 차선 인식 (OpenCV 사용)
OpenCV 자이카 카메라 활용, 차선 인식