ROS 설치
http://wiki.ros.org/melodic/Installation/Ubuntu
여기 링크에서 명령어 복사해서 입력하면 된다. (난 이걸 모르고 하나씩 다 입력했다...) 해당 문서와 아래 작업 순서가 조금 다를 수 있지만 상관없다.
0. ubuntu 18.04 설치 확인
$ uname -a
1. ros 제공 software repository 등록
패키지가 있는 ros 사이트로부터 다운 받을 수 있도록 pc 세팅
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ cat /etc/apt/sources.list.d/ros-latest.list
2. apt key 셋업
ros의 저장소로부터 패키지를 내려받기 위해 공개키를 추가해야한다.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654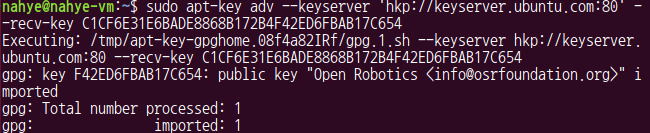
3-1. 패키지 설치
debian 패키지 목록 최신화
$ sudo apt-get update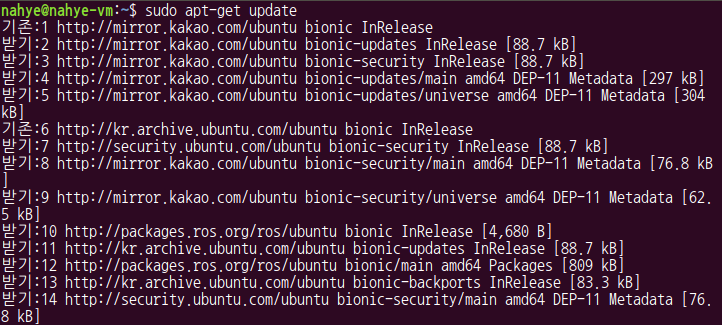
3-2. 패키지 설치
full로 하면 library, 시뮬레이터 등을 다 설치하기 때문에 이걸 권장한다.
$ sudo apt install ros-melodic-desktop-full4. rosdep 초기화
$ sudo apt install python-rosdep
$ sudo rosdep init
$ rosdep update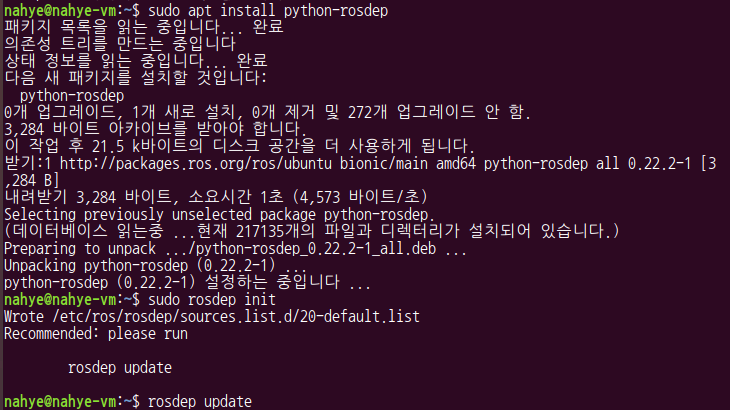
5. 쉘 환경 설정
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
6. 추가 도구 설치
ros dep(컴파일하는 소스에 대해서 system dependency를 쉽게하는 도구)도 추가되어 있다.
$ sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
7. ros 설치 확인
$ roscore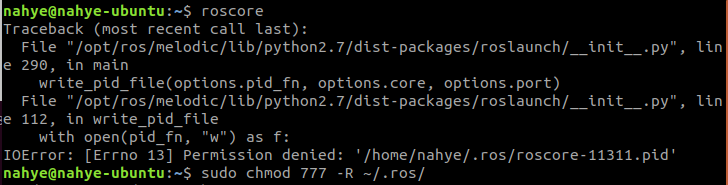
- 그런데! 권한 에러가 났다..이런 경우에는 아래의 명령어로 권한을 설정해주면 된다.
$ sudo chmod 777 -R ~/.ros/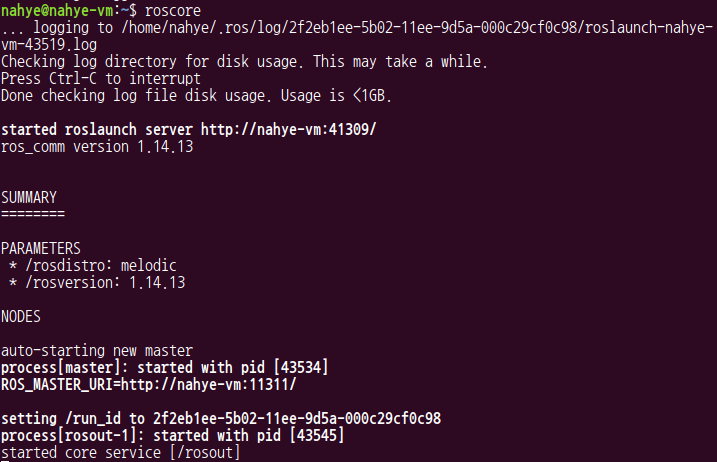
-
새로 터미널을 하나 더 열어서
$ rosnode list확인 (더블체크) 후

-
본래 터미널로 돌아가서
ctrl+c입력해야 roscore가 종료된다.