workspace
- ROS에서 코딩을 하기 위해서는 workspace라는 공간 필요
- 아래의 방법으로 workspace를 생성하면 다음과 같은 구조가 된다
- workspace 이름 : xycar_ws
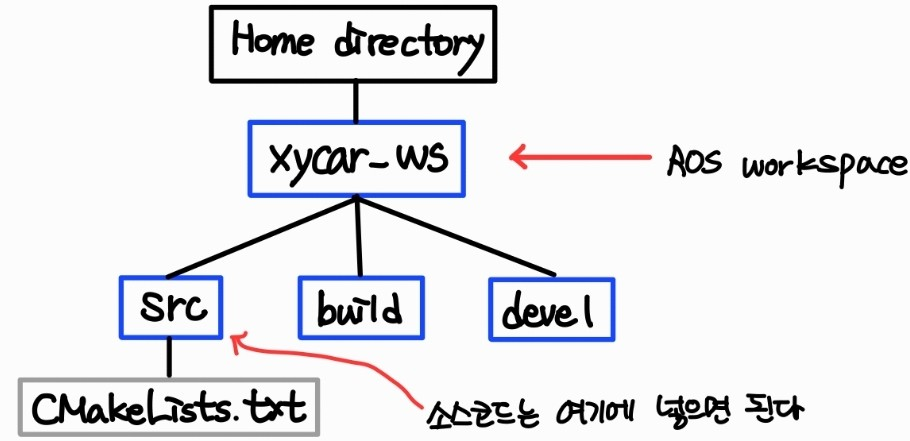
- workspace 이름 : xycar_ws
workspace 생성
$ cd
$ mkdir -p ~/xycar_ws/src
$ cd xycar_ws/
$ catkin_make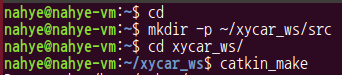
cd: home directory로 이동mkdir -p ~/xycar_ws/src: xycar_ws 폴더 생성cd xycar_ws/: xycar_ws 폴더로 이동catkin_make: ros 코딩 환경 setup과 정리(build)
catkin_make
- workspace에서 새로운 소스코드 파일이나 패키지가 만들어 지면 (수정되면) 빌드해야 한다
- 최신 상태로 만드는 작업
ROS 작업 환경 설정 (환경변수 설정)
1. home 디렉토리의 .bachrc 파일 수정
$ cd
$ sudo gedit ~/.bashrc (아래의 내용 추가)
- .bashrc 파일에 아래의 내용 추가
alias cm='cd ~/xycar_ws && catkin_make'
alias cs='cd ~/xycar_ws/src'
source /opt/ros/melodic/setup.bash
source ~/xycar_ws/devel/setup.bash
export ROS_MASTER_URI=http://localhost:11311
export ROS_HOSTNAME=localhost2. 저장 후 나가기
$ source .bashrc (수정한 내용 시스템에 반영)
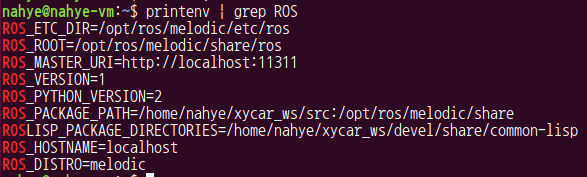
3. 환경변수 설정 확인
$ printenv | grep ROS