1. rviz_lidar 패키지 만들기
$ catkin_create_pkg rviz_lidar rospy tf geometry_msgs urdf rviz xacro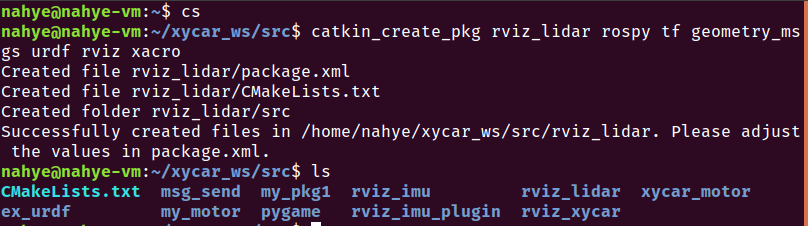
2. launch와 src 폴더 만들기
$ mkdir launch
$ mkdir rviz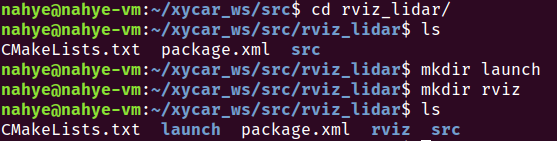
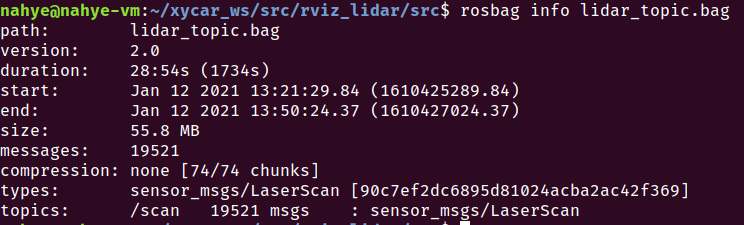
3. src 폴더 안에 lidar_topic.bag 파일 붙여넣기
- lidar_topic 정보
4. launch 폴더에 lidar_3d_rosbag.launch 파일 만들기
<launch>
<node name="rviz_visualizer" pkg="rviz" type="rviz" required="true"
args="-d $(find rviz_lidar)/rviz/lidar_3d_rosbag.rviz" />
<node name="rosbag_play" pkg="rosbag" type="play" output="screen"
required="true" args="$(find rviz_lidar)/src/lidar_topic.bag" />
</launch>5. 실행
$ cm
$ roslaunch rviz_lidar lidar_3d_rosbag.launch6. rviz 설정
-
LaserScan 추가
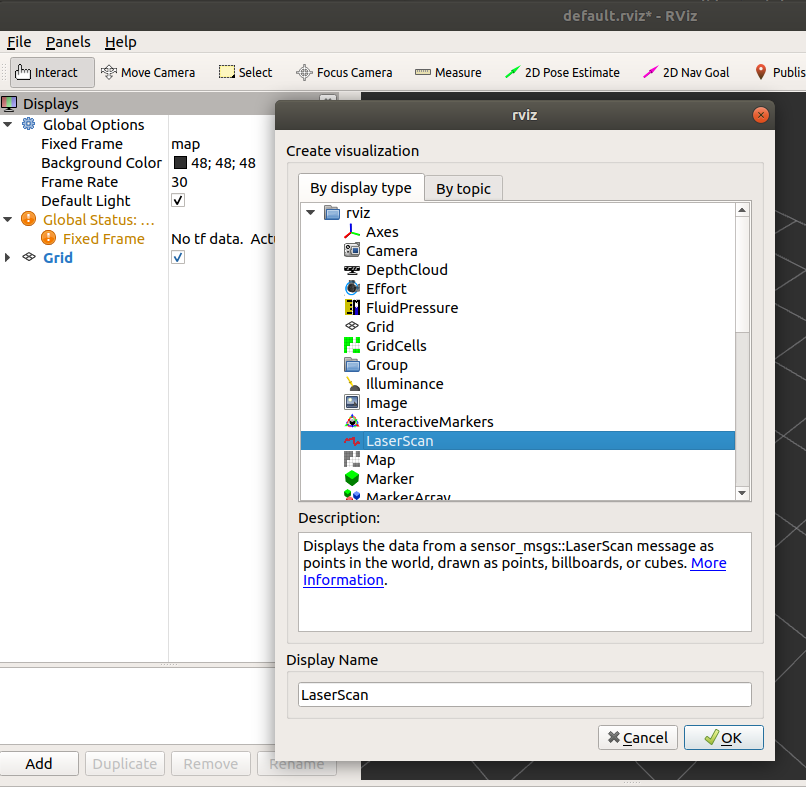
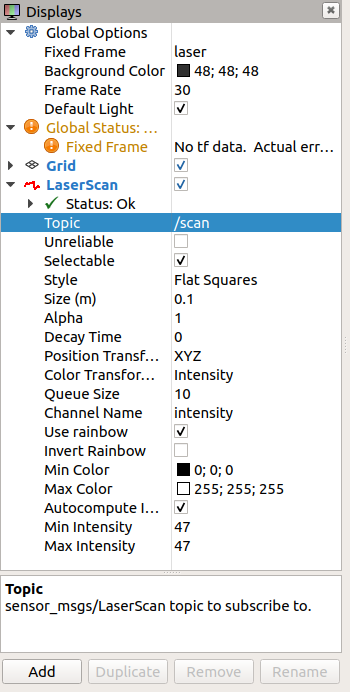
-
topic을 /scan으로 설정
-
fixed frame을 laser로 설정
-
LaserScan의 size를 0.1로 설정(점의 크기로 너무 작으면 안보일 수 있다)
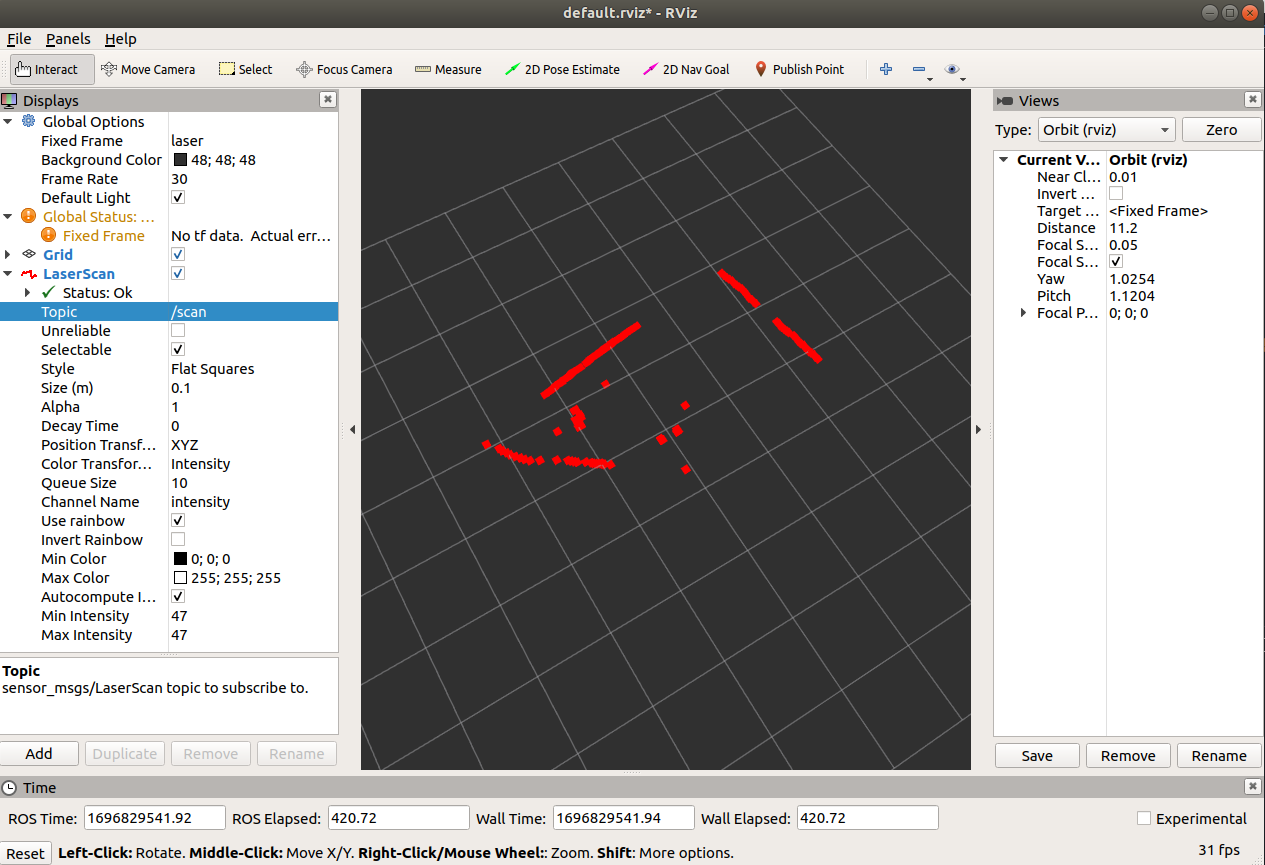
-
종료 후 저장
-
계속 이런 에러가..ㅠㅠ 근데 경로가 이상하다! 왜 그런지는 모르겠지만 rviz 파일이 존재하지 않아서 저기로 연결되는 것 같다. save를 누르면 어디에 저장할지 선택할 수 있는데 그때 원하는 경로로 설정하면 된다.
Failed to open /opt/ros/melodic/share/rviz/default.rviz for writing.
- 그 후에 다시 save하고자 하면 제대로 뜬다!