1. sender_serial.py 작성
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender_serial', anonymous=True)
pub = rospy.Publisher('my_topic', Int32)
rate = rospy.Rate(2)
count = 1
while not rospy.is_shutdown():
pub.publish(count)
print(count, " sended")
count = count + 1
rate.sleep()2. receiver_serial.py 작성
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
def callback(msg):
print msg.data
rospy.init_node('msg_receiver', anonymous=True)
sub = rospy.Subscriber('my_topic', Int32, callback)
rospy.spin()
3. 권한 설정
$ chmod +x receiver_serial.py sender_serial.py 
4. 실행
t1 : roscore
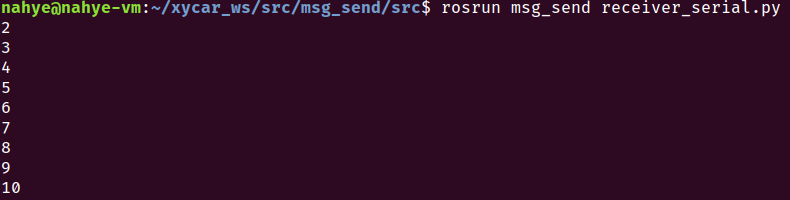
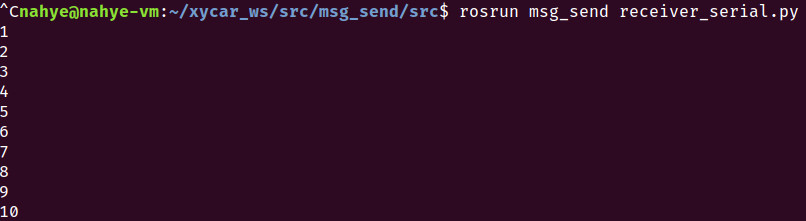
t2 :rosrun msg_send receiver_serial.py
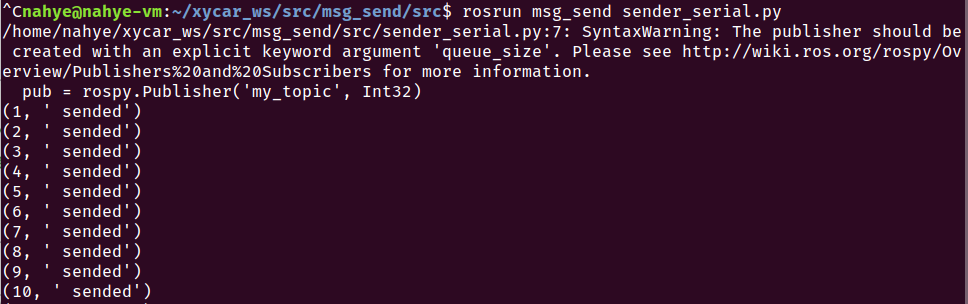
t3 : rosrun msg_send sender_serial.py
5. 결과 : sender는 1을 보냈지만 receiver에는 1이 나오지 않는다!!!
6. 왤까??(내 생각)
아마도... receiver와 sender가 서로 통신을 연결하는 과정에서 시간이 걸리고 그 사이에 sender가 값을 보냈기 때문에 1을 받지 못하는거 아닐까?
7. 해결방안(내 생각)
음... 서로 통신이 연결된 후부터 sender가 값을 보내기 시작한다면 해결될까??
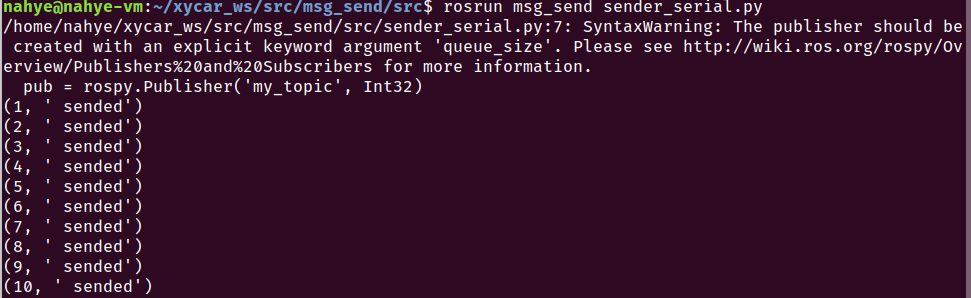
8. 해결
sender_serial.py에 while(pub.get_num_connections() == 0): 추가
get_num_connections()
등록된 node의 수를 반환해주는 함수
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender_serial', anonymous=True)
pub = rospy.Publisher('my_topic', Int32)
rate = rospy.Rate(2)
count = 1
while(pub.get_num_connections() == 0):
count = 1
while not rospy.is_shutdown():
pub.publish(count)
print(count, " sended")
count = count + 1
rate.sleep()
1:3인 경우
sender_serial.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
rospy.init_node('sender_serial', anonymous=True)
pub = rospy.Publisher('my_topic', Int32, queue_size=1)
rate = rospy.Rate(2)
count = 1
while(pub.get_num_connections() != 3):
count=1
while not rospy.is_shutdown():
pub.publish(count)
print(count, " sended")
count = count + 1
rate.sleep()
receiver_serial.py
그대로
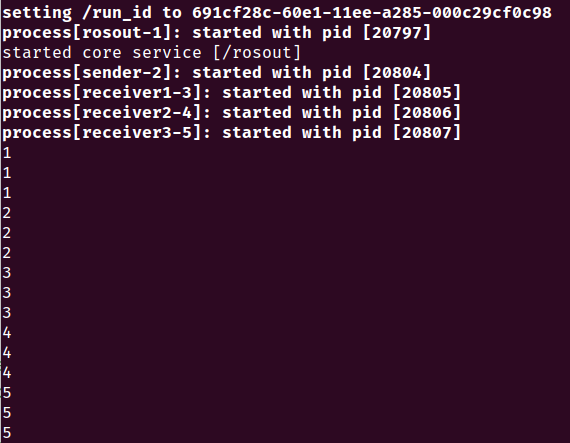
serial_1n.launch
<launch>
<node pkg="msg_send" type="sender_serial.py" name="sender"/>
<node pkg="msg_send" type="receiver_serial.py" name="receiver1" output="screen"/>
<node pkg="msg_send" type="receiver_serial.py" name="receiver2" output="screen"/>
<node pkg="msg_send" type="receiver_serial.py" name="receiver3" output="screen"/>
</launch>결과
1부터 다 나온다!