rviz 실행
$ roslaunch rviz_xycar xycar_3d.launch 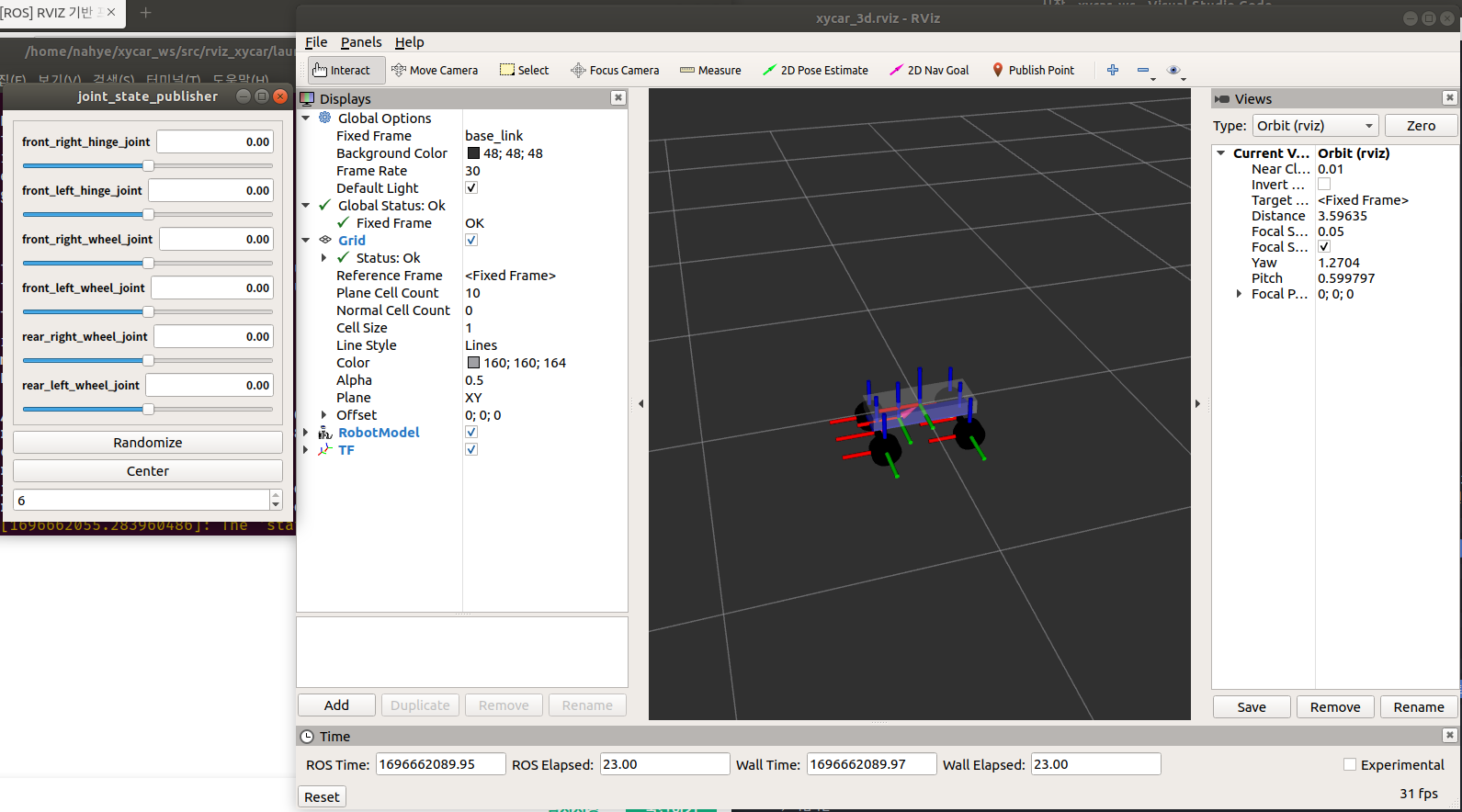
rviz 코딩으로 바퀴 움직이기
1. move_joint.py
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import JointState
from std_msgs.msg import Header
rospy.init_node("move_joint")
pub = rospy.Publisher("joint_states", JointState, queue_size=10)
hello_xycar = JointState()
hello_xycar.header = Header()
hello_xycar.name = ["front_right_hinge_joint", "front_left_hinge_joint","front_right_wheel_joint","front_left_wheel_joint","rear_right_wheel_joint","rear_left_wheel_joint"]
hello_xycar.velocity = []
hello_xycar.effort = []
a = -3.14
b = -3.14
rate = rospy.Rate(50)
while not rospy.is_shutdown():
hello_xycar.header.stamp = rospy.Time.now()
if a >= 3.14:
a = -3.14
b = -3.14
else:
a += 0.01 #약 6도
b += 0.01
hello_xycar.position = [0, 0, a, b, 0, 0]
pub.publish(hello_xycar)
rate.sleep()2. 권한
$ chmod +x *.py
3. 실행
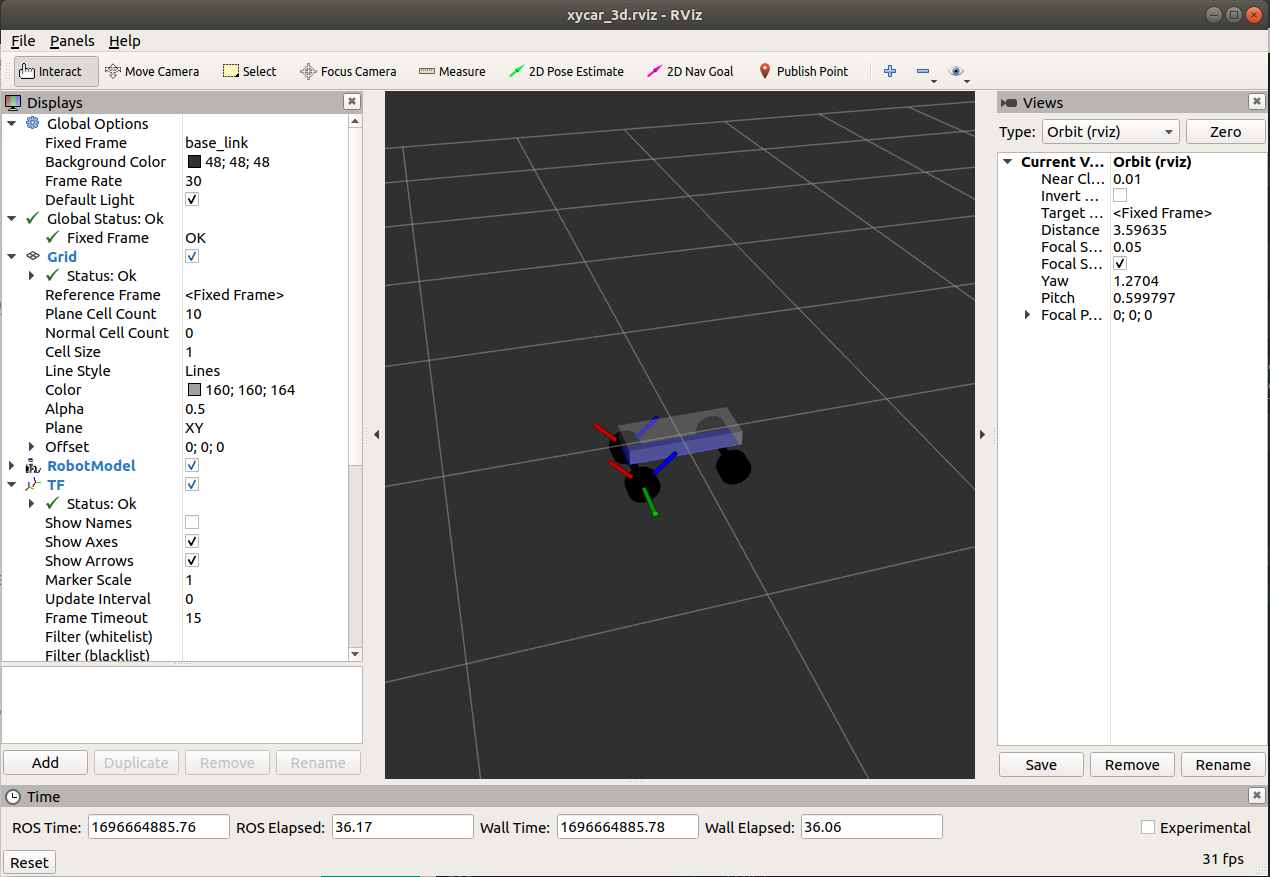
$ roslaunch rviz_xycar move_joint.launch - 앞바퀴 2개가 돌아간다아ㅏ
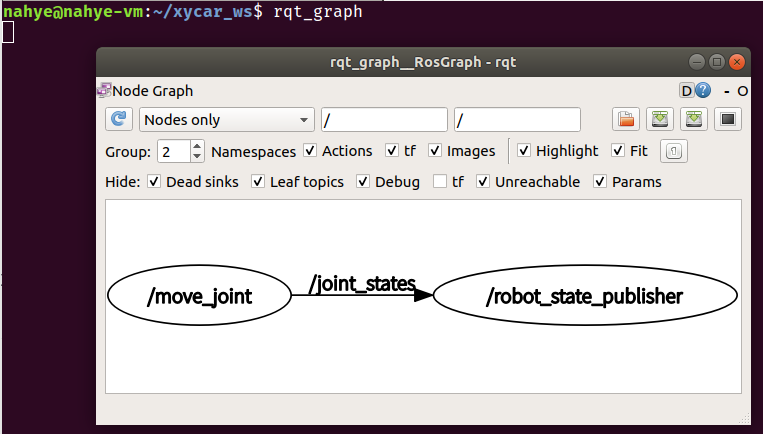
rviz 8자 바퀴 주행
-
rviz_8_drive.py
-
converter.py
-
rviz_drive.launch
-
권한

- 실행
$ roslaunch rviz_xycar rviz_drive.launch
바퀴가 안뜬다!!!!
--> converter.py 파일의 callback에 이걸 추가하면 해결됨
hello_xycar.header.stamp = rospy.Time.now()
rviz 진짜 8자 주행
-
odom_8_drive.py
-
converter.py
-
rviz.odom.py
-
rviz_odom.launch
