my_cam
- my_cam 패키지 만들기
$ cd xycar_ws/src/
$ catkin_create_pkg my_cam rospy std_msgs
- launch 폴더 만들기
$ cd my_cam/
$ mkdir launch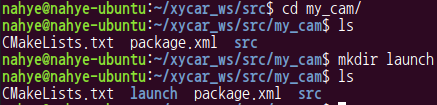
-
src 폴더에 edge_cam.py 파일 만들기
-
edge_cam.py에 실행 권한 주기

-
launch 폴더에 edge_cam.launch 파일 만들기
-
터미널에서 roslaunch 실행
$ roslaunch edge_cam.launch카메라 토픽 받아오기(ex_codes의 rosbag_ex)
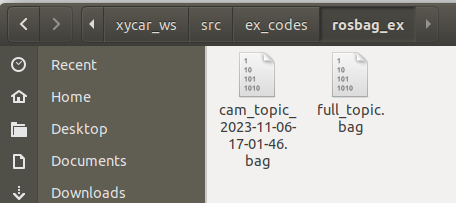
- 폴더 위치 : xycar/src/ex_codes/rosbag_ex
- 터미널 1
$ roscore- 터미널 2 : 카메라 영상 받을 준비
$ rosbag record -o cam_topic /usb_cam/image_raw
- 3번을 실행시키고 끝나면 종료시킨다.
- 이런에러가 뜬다면
roscore를 실행시킨다
[registerPublisher] Failed to contact master at [localhost:11311]. Retrying...
- 터미널 3 : 모든 토픽 중에 카메라 영상만 가져오기
$ rosbag play full_topic.bag- 폴더에 .bag 파일이 생긴다
- cam_topic.bag으로 이름 변경
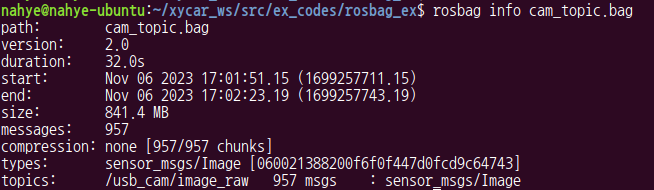
- rosbag 확인
$ rosbag info cam_topic.bag
- bag 파일에서 동영상 만들기
- 터미널 1 : 터미널 2가 끝나면 ctrl+c 로 정지
$ rosrun image_view video_recorder image:='/usb_cam/image_raw' _filename='track2.avi' _fps:=30
- 터미널2
$ rosbag play cam_topic.bag
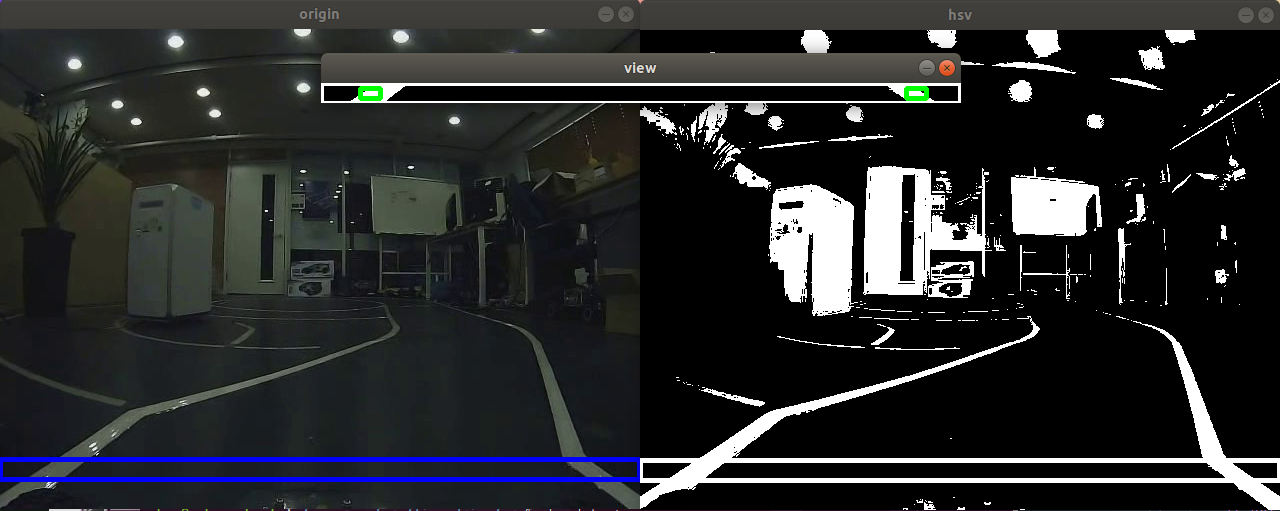
edge_cam.py 실행
- 해당 폴더로 위치 옮겨와서 실행
- 터미널 1
$ python edge_cam.py- 터미널 2
$ rosbag play cam_topic.bag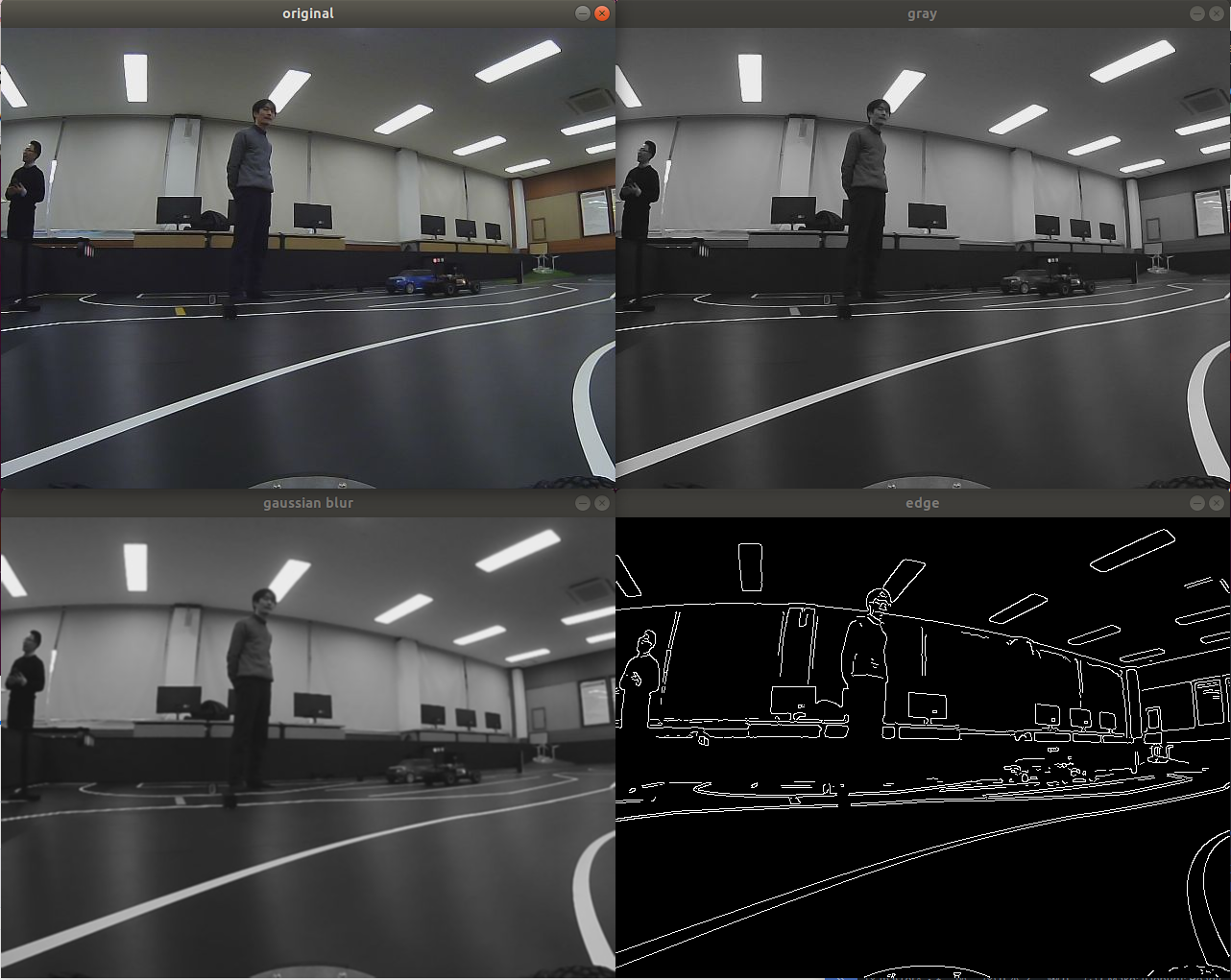
명도차 기반 차선 인식(line_drive 패키지)
- line drive 패키지 만들기
$ catkin_create_pkg line_drive rospy tf geometry_msg rviz xacro
- src 폴더에 line_fine.py 파일 만들기
- 권한 설정
-
track1.avi 영상 옮기기 + line_fine.py 파일에 경로 수정
-
cmakelists.txt에서 opencv 라이브러리 연결 (아래 내용 추가)
find_package(OpenCV REQUIRED HINTS ${CMAKE_SOURCE_DIR}/thirdparty/OpenCV/install/lib/cmake/opencv4)
include_directories(
# include
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
link_libraries(
${OpenCV_LIBS}
)
- 실행
$ python line_find.py