ROS에서의 통신
-
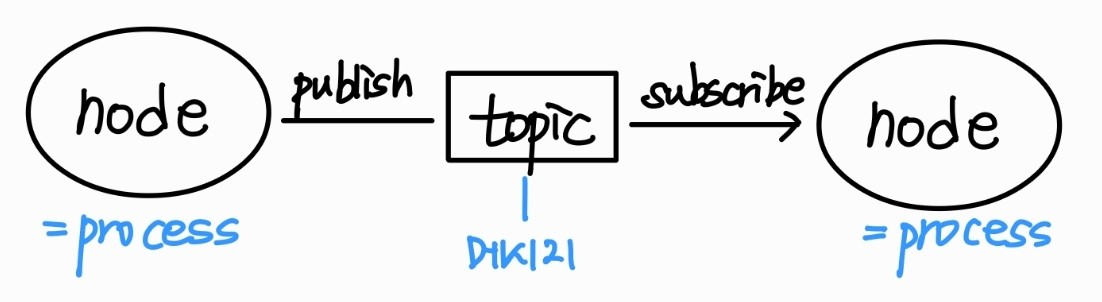
통신 = 노드(node) 간 토픽(topic)의 발행 & 구독(publish & subscribe) 기반의 메시지 교환
-
ROS를 사용하면 서로 다른 기종 간에 메시지 교환 가능
-
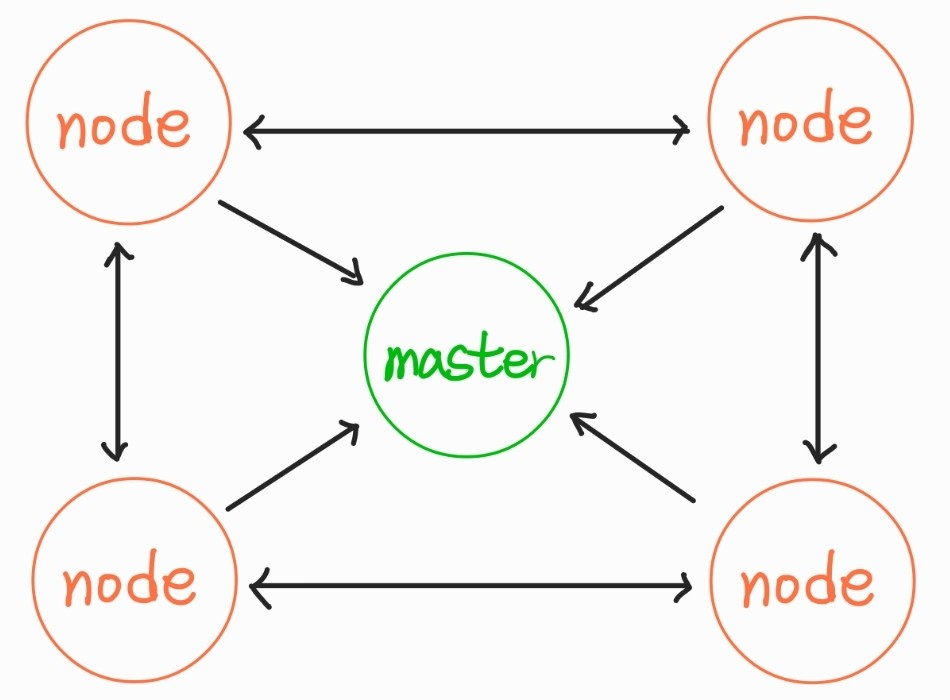
노드간 통신을 기반으로 전체 시스템을 구동
- HW 부품, SW 모듈에 node가 하나씩 할당
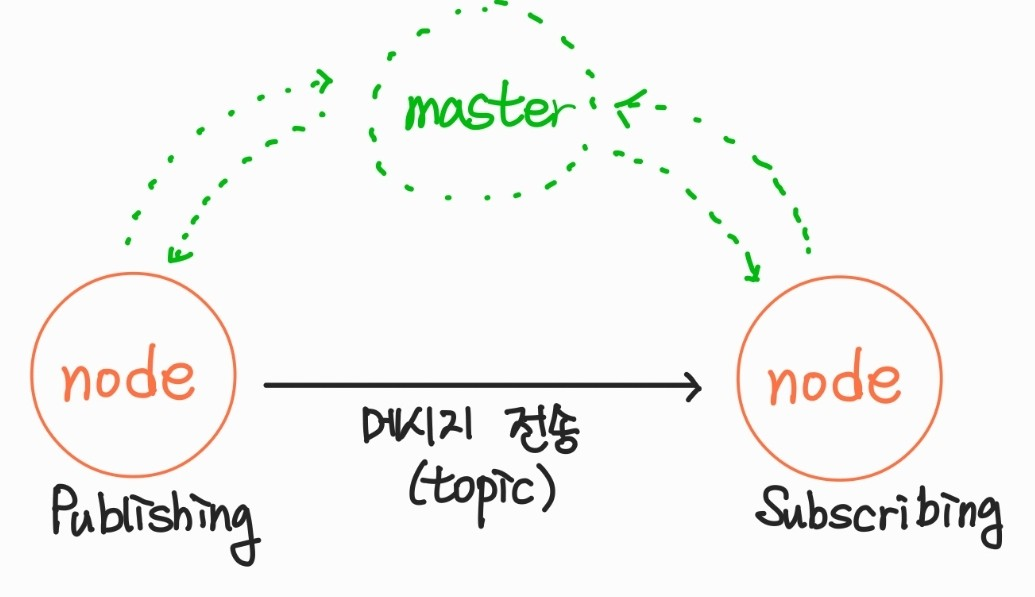
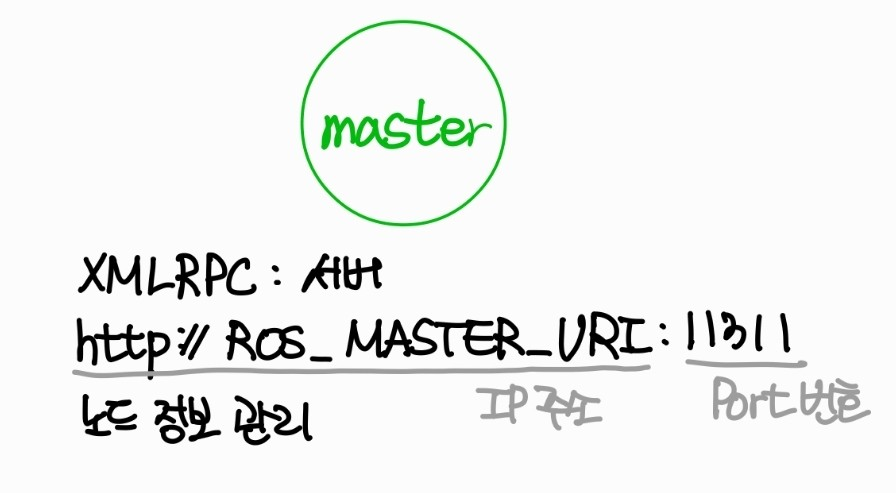
- node들은 master(node 간 통신을 도와준다, 전체에 1개)의 도움을 받아 서로 메시지를 주고 받는다
- node는 OS의 도움을 받아 HW 장치들을 제어
-
네트워크를 통한 원격 연동도 가능
ROS 노드간 통신 기본 과정
- 통신이 이루어지기 전에 통신을 원하는 node는 master에 의뢰
- 연결해야하는 node의 정보(주소)를 얻어오고 서로 접속 정보를 교환
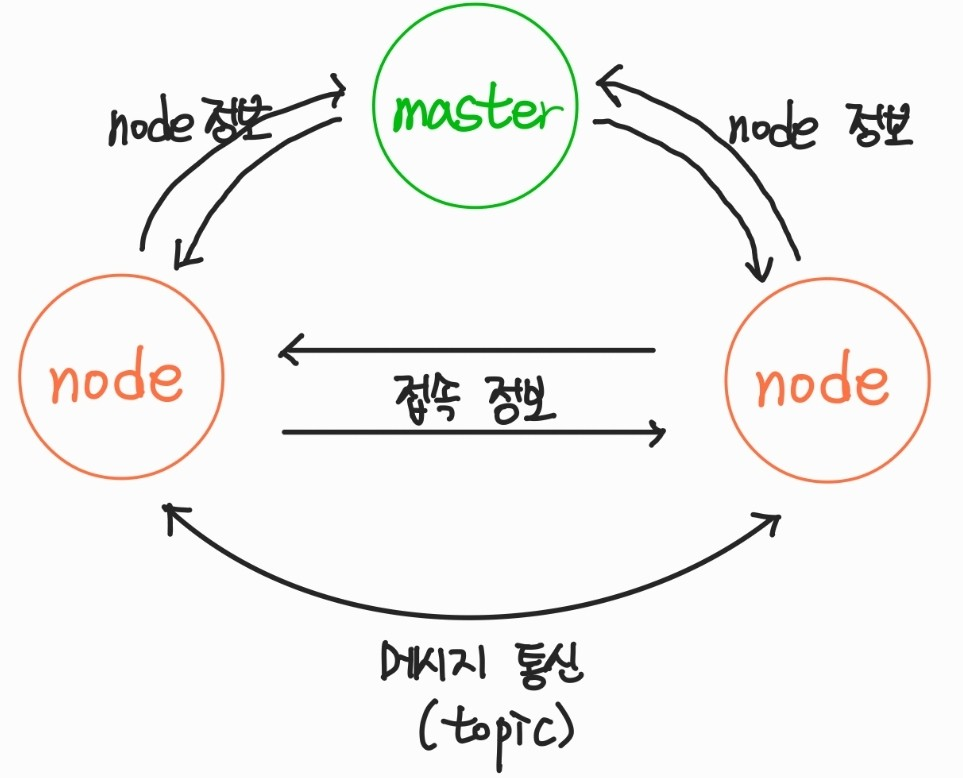
- 통신환경 구축이 완료되면, node 간 통신은 master를 거치지 않고 직접 이루어진다
노드간 통신의 2가지 방식
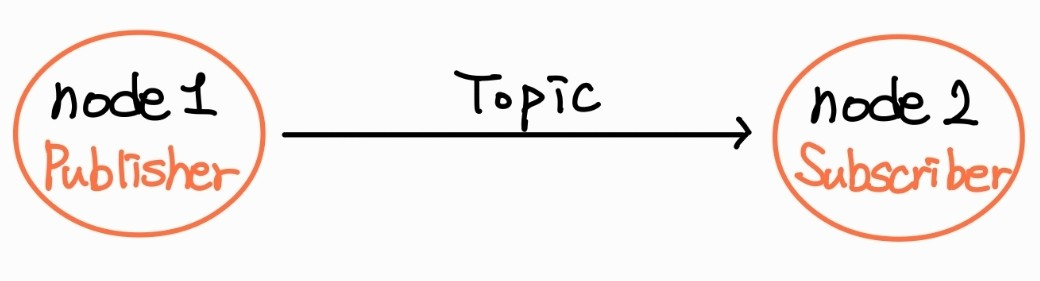
topic 방식의 통신
- 일방적이고 지속적인 메시지 전송
- 1:1, 1:N, N:N 통신도 가능
- 자율주행은 이 방법 사용
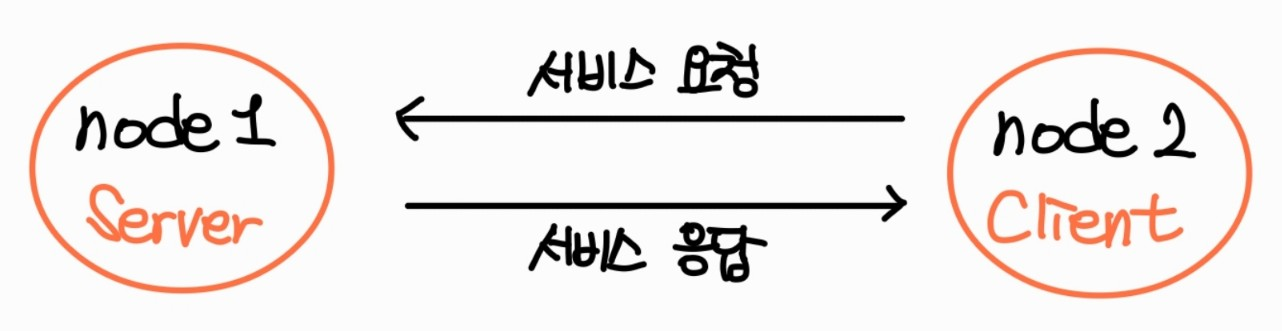
service 방식의 통신
- server가 제공하는 service에 client가 요청을 보내고 응답을 받는 방식
- 양방향 통신, 일회성 메시지 송수신
ROS 노드간 통신 시나리오
1. master(roscore) 실행
- master의 ip 주소가 공개되어야 함
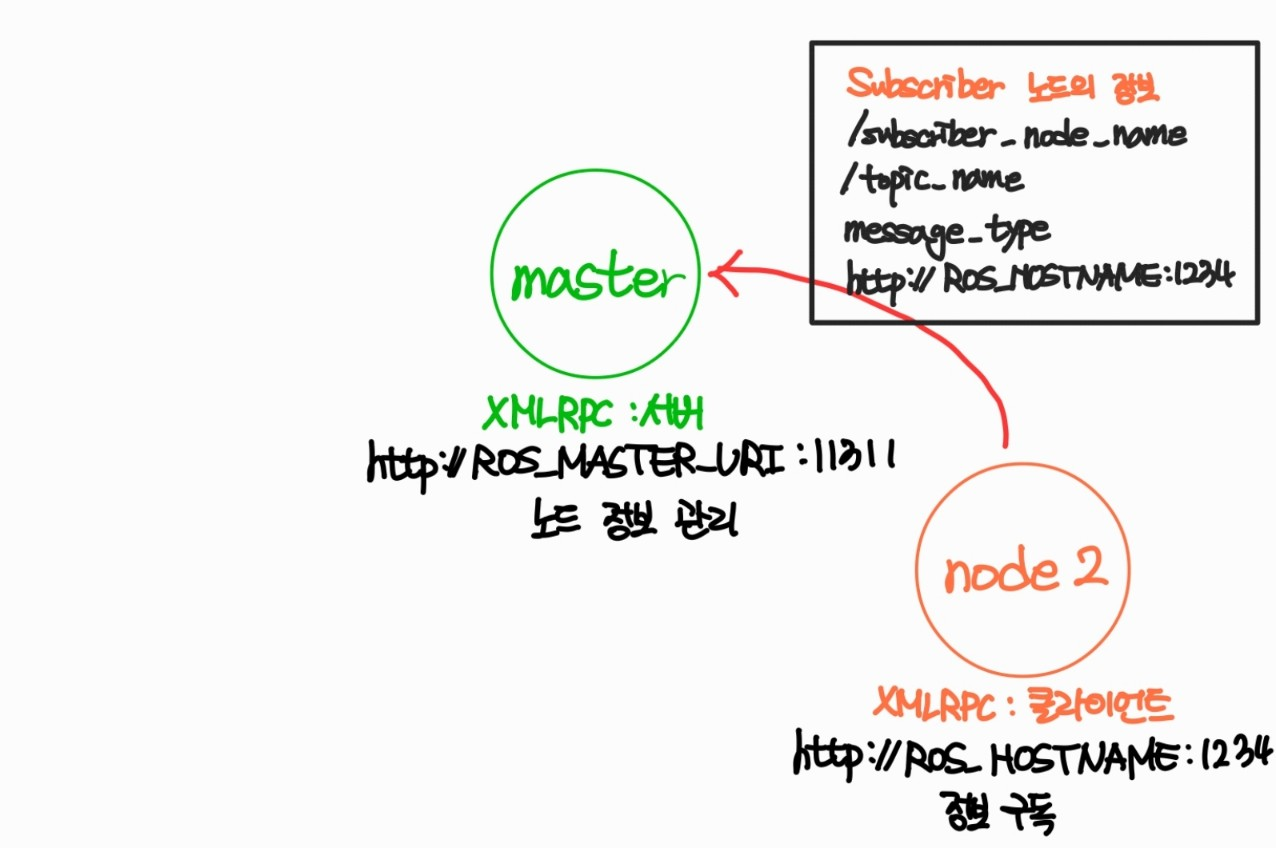
2. subscriber node 구동
- 특정 topic에 발행되는 메시지를 수신하기를 master에 요청
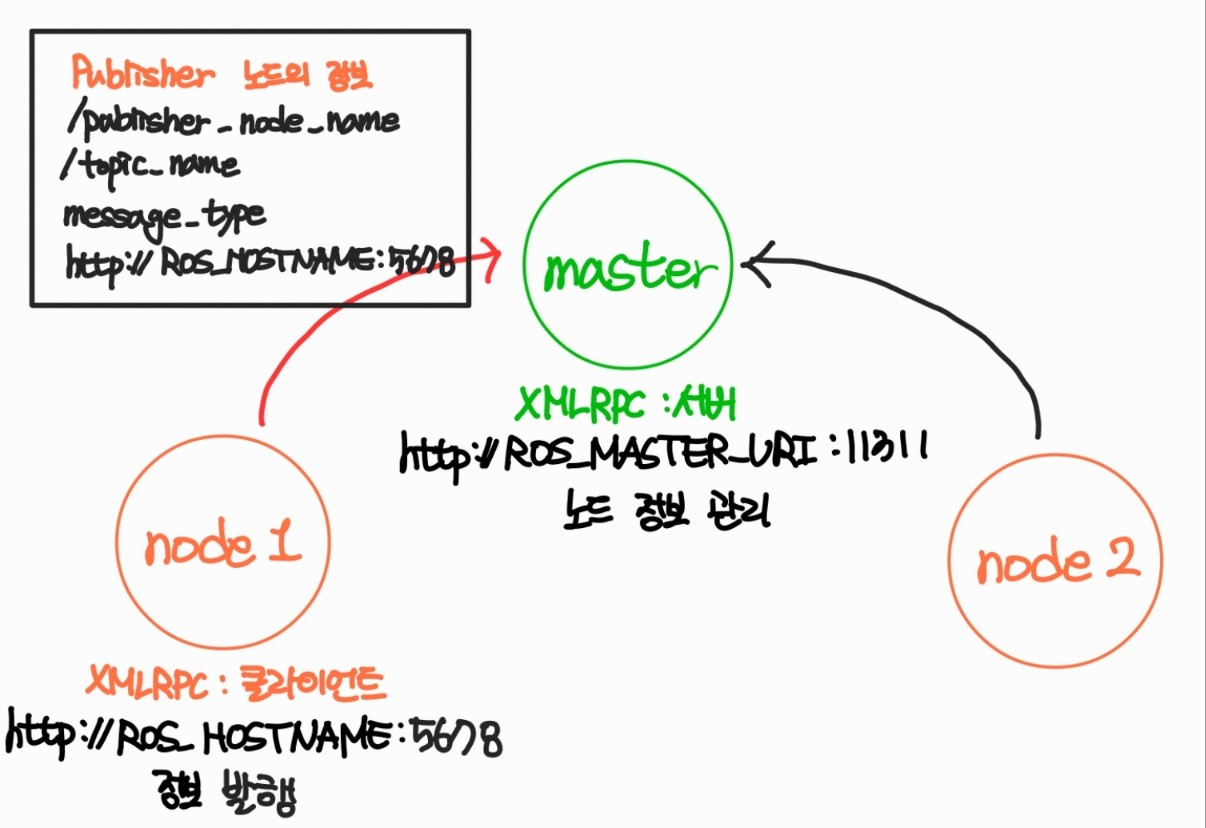
3. publisher node 구동
- 특정 topic 메시지를 발행하겠다는 의사를 master에 전달
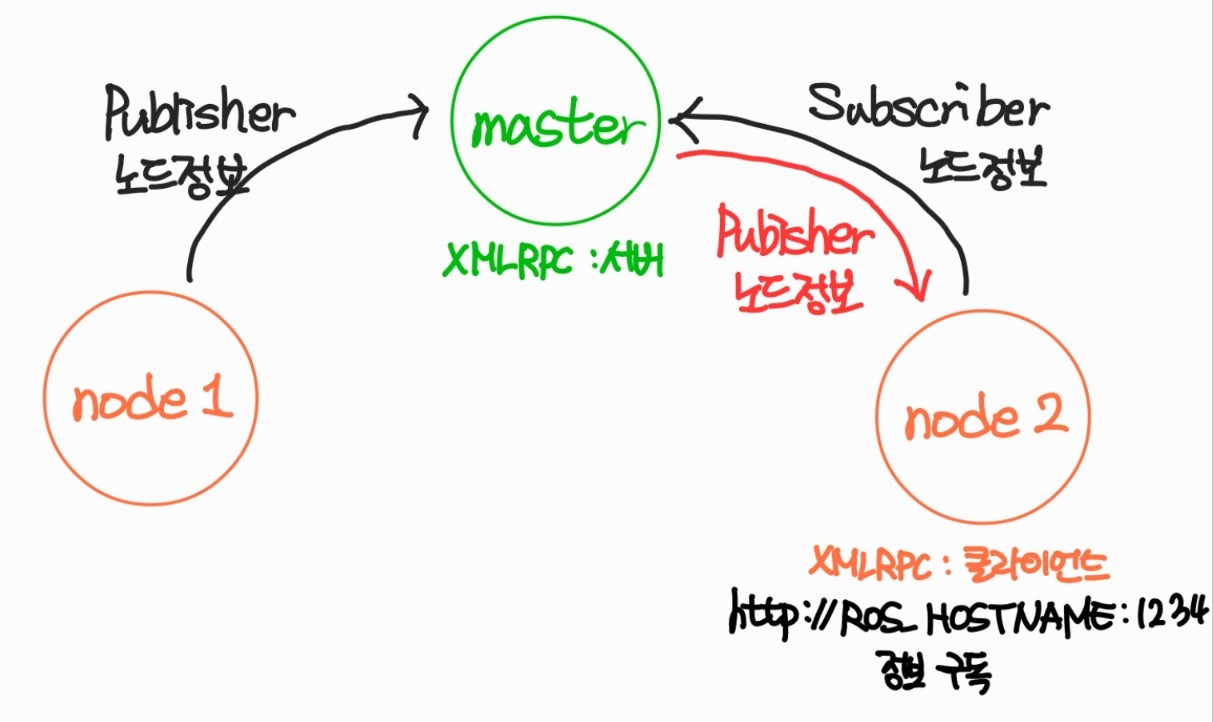
4. node 정보 전달
- master가 publisher 정보를 subscriber에게 전달
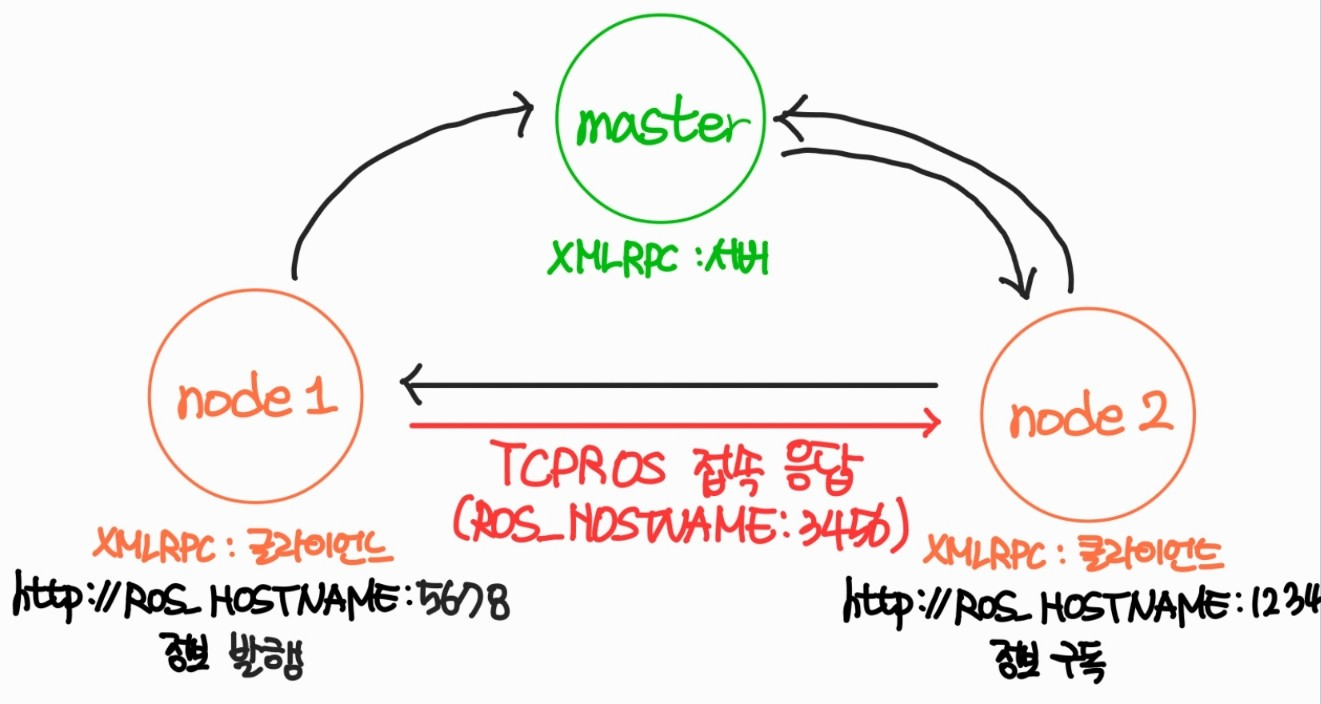
5. node 간 접속 요청
- subscriber node가 publisher node에 TCPROS 접속 요청
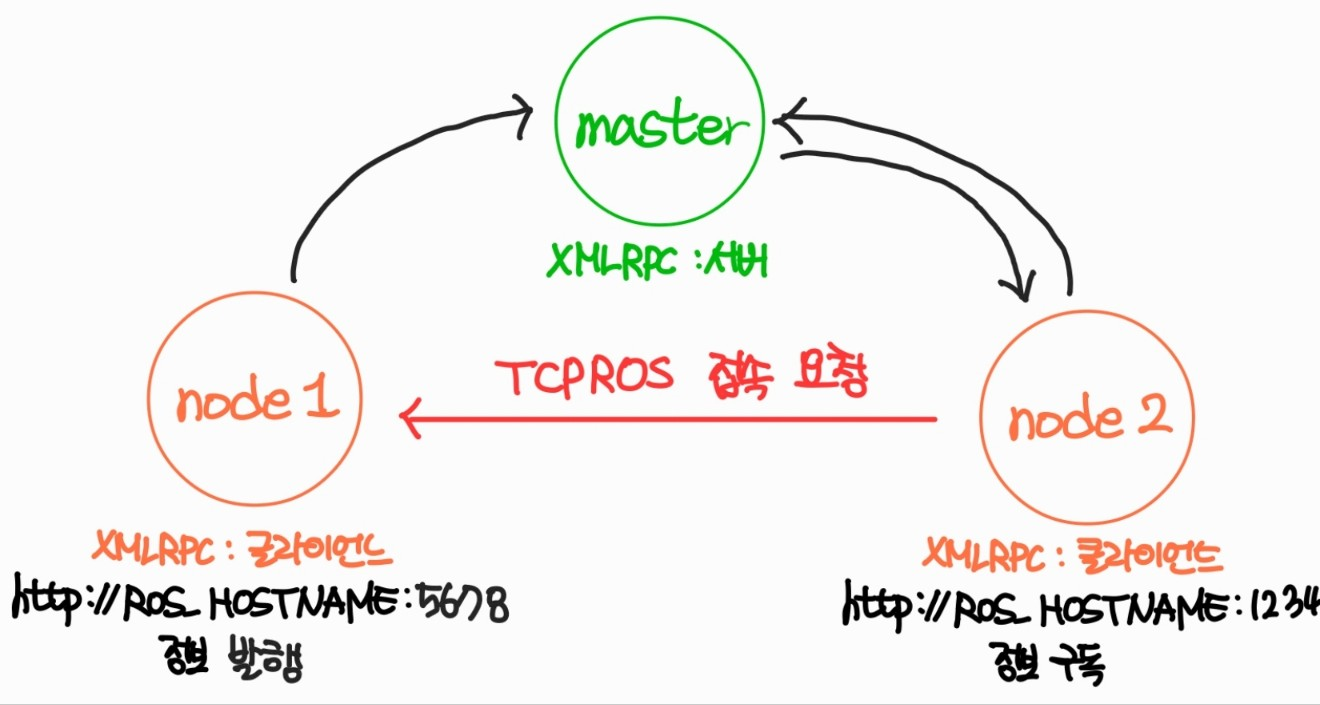
6. node 간 접속 요청에 대한 응답
- publisher node가 자신의 TCPROS URI(port 포함)을 전송하여 응답
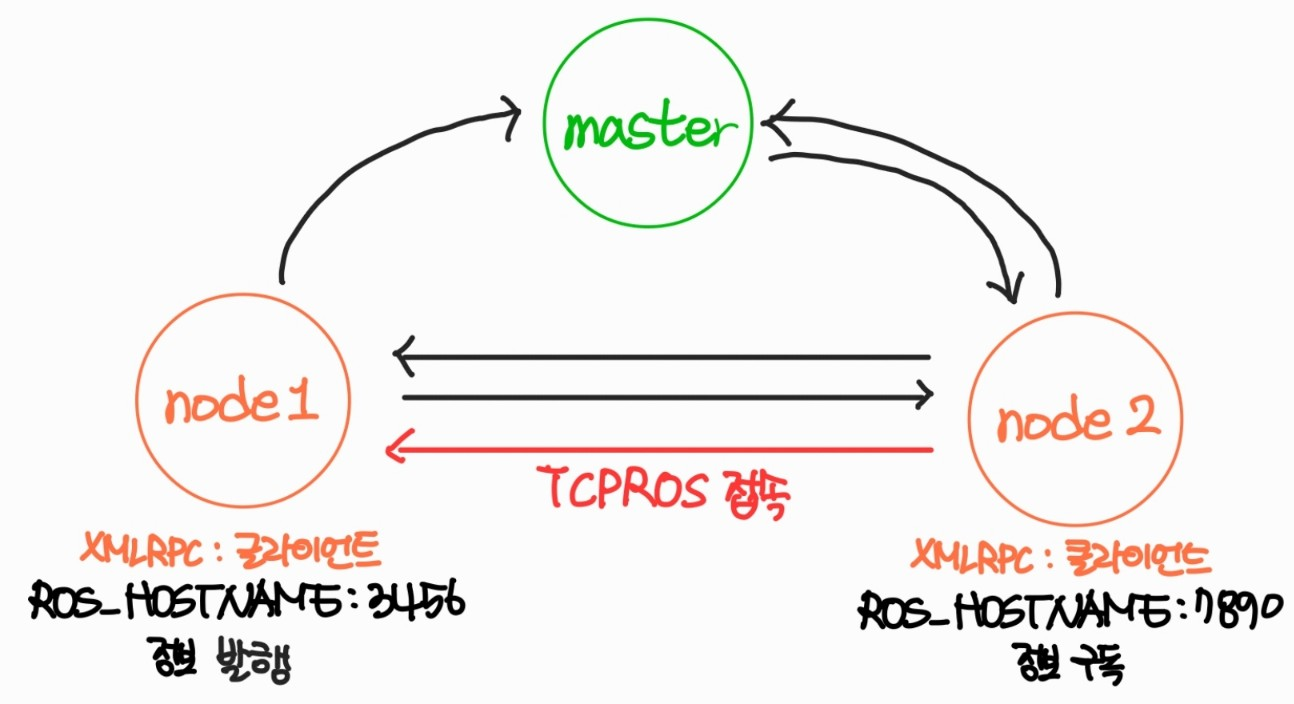
7. TCPROS 접속
- publisher node와 subscriber node 사이에 소켓(socket) 연결이 이루어짐
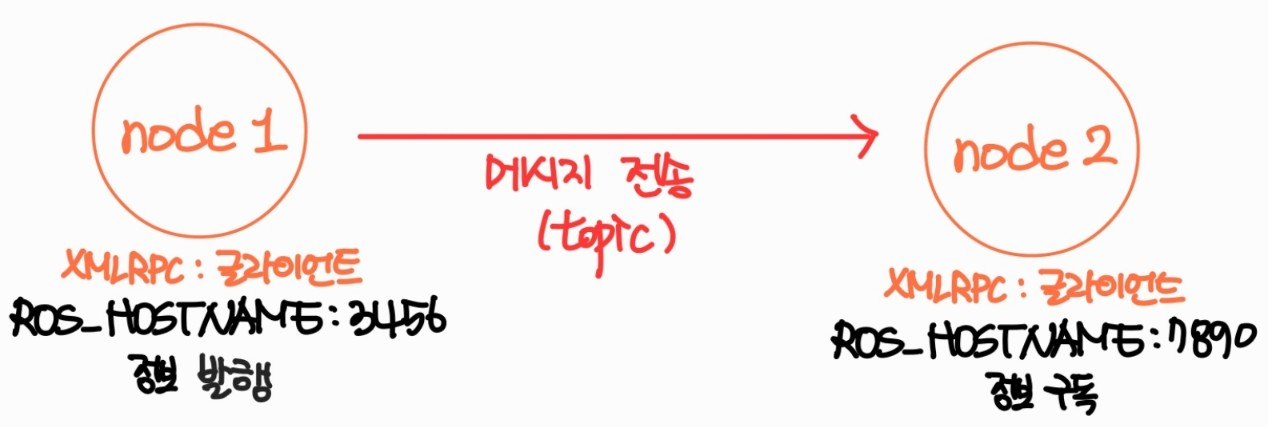
8. 메시지 전송
- publisher node가 subscriber node에게 메시지(topic) 전송
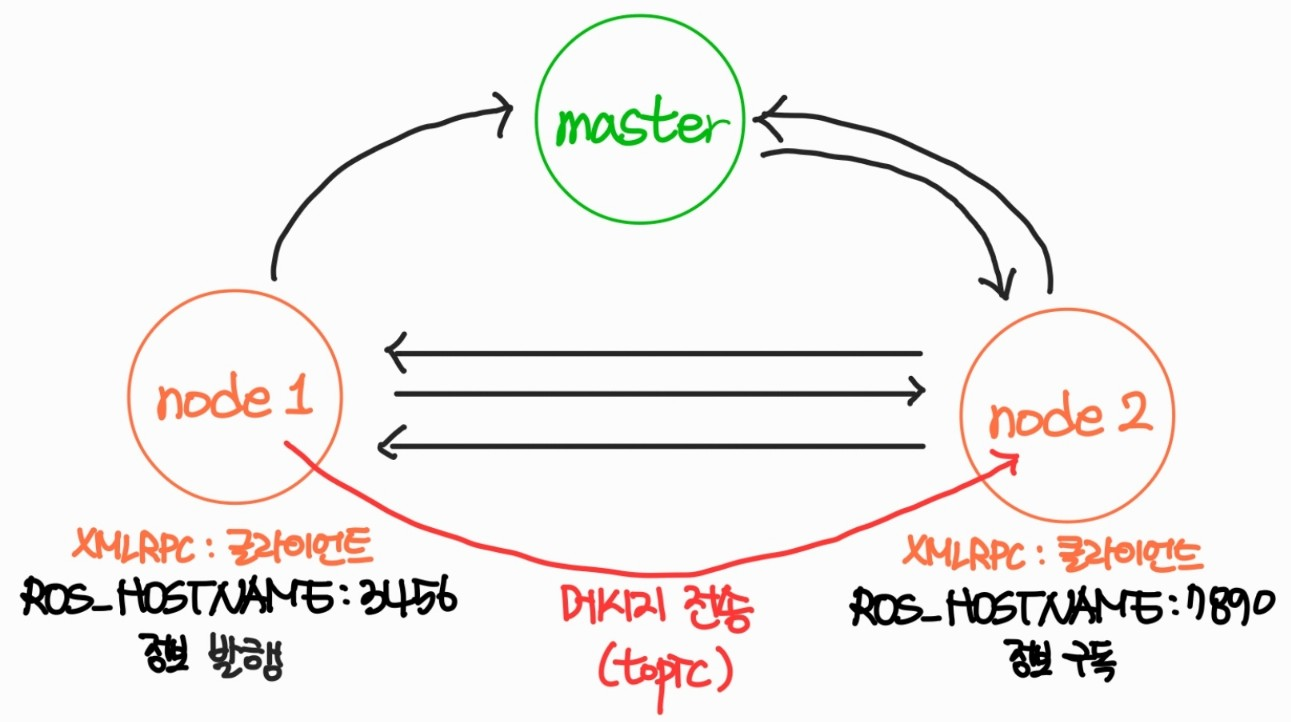
9. 메시지 전송 반복
- 접속이 한번 이루어진 뒤에는 별도의 절차 없이 지속적으로 메시지 송수신 (master의 역할이 사라지지만 아에 사라지는 것은 아니다!!)