ROS
1.[ROS] Ubuntu 18.04에 ROS Melodic설치
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list$ cat /etc/apt/sourc
2.[ROS] ROS 프로그래밍을 위한 환경 설정
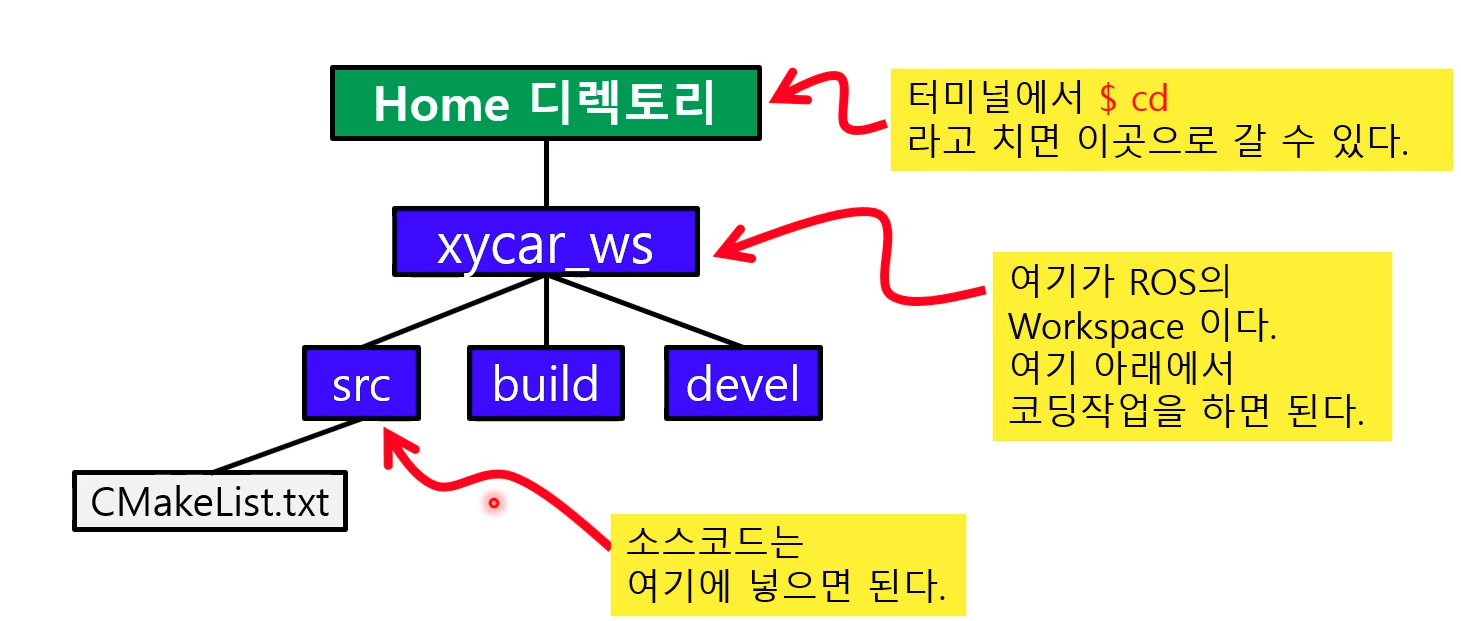
다음과 같은 방법으로 'xycar_ws'라는 이름의 Workspace를 생성한다.(폴더 생성)$ cd Home 폴더로 이동$ mkdir -p ~/xycar_ws/src 서브 폴더 생성$ cd xycar_ws xycar_ws 폴더로 이동$ catkin_make ROS 코
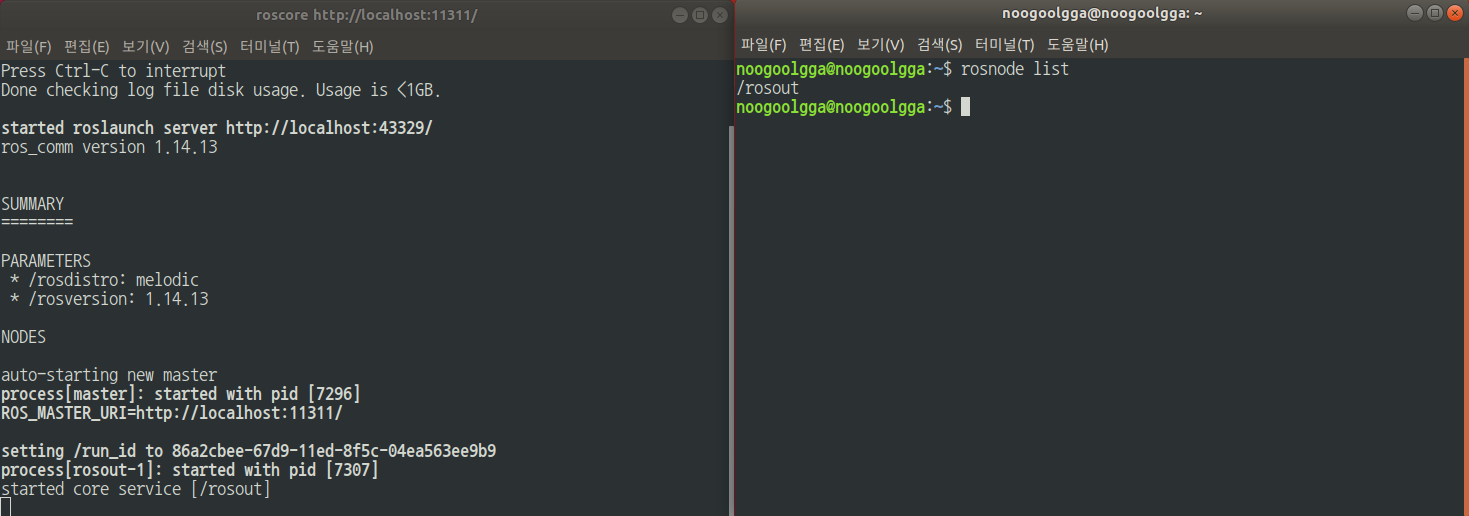
3.[ROS] ROS의 기초
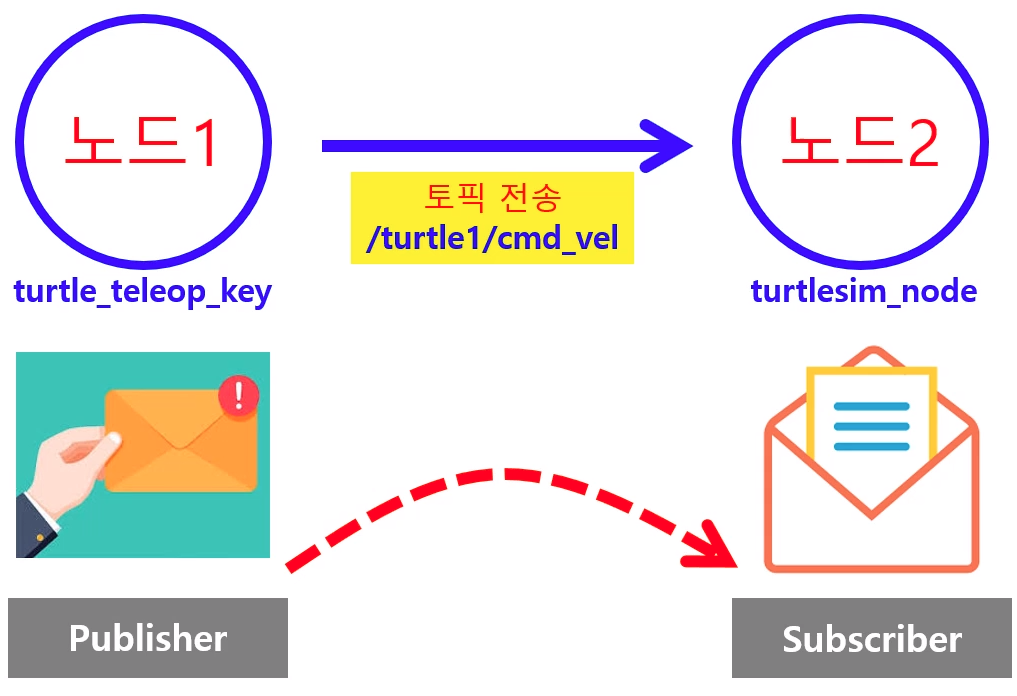
노드1에서 노드2로 토픽이 날아가는 구조이다.turtle_teleop_key라는 프로그램과 turtlesim_node프로그램에서 각각의 노드 하나씩을 실행한다.노드1은 Publisher node이며 topic을 보낸다.노드2는 Subscriber node이며 topic
4.[ROS] ROS프로그래밍 기초
1. ROS Package 기초 ROS 패키지 Package ROS에서 개발되는 소프트웨어를 논리적 묶음으로 만든 것 어떤 패키지들이 있는지 나열 이름을 이용해서 패키지 검색 ROS 패키지 디렉토리로 이동 Linux ls와 유사(경로를 몰라도 이름 적용 가능) (환
5.ROS 예제코드 분석
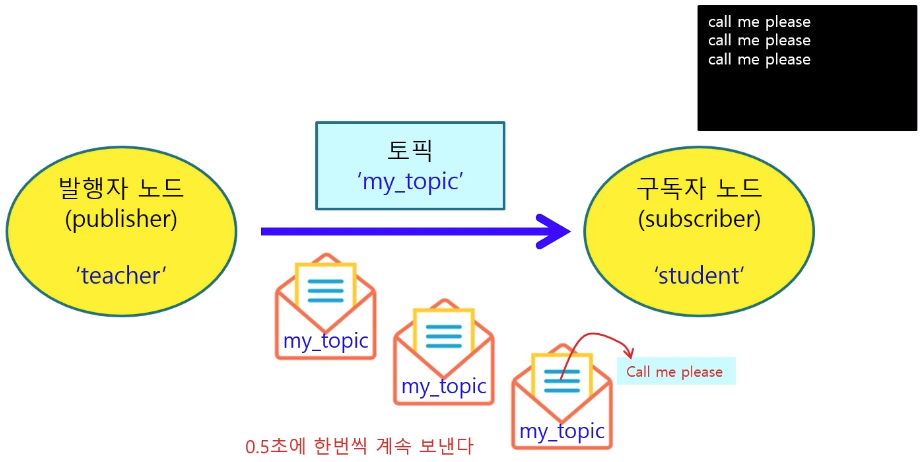
2개 파일의 소스코드 분석teacher.pystudent.py\` - 파일의 첫 줄에 - 스크립트 파일의 첫 줄에 사용된다해당 파일의 실행에 어떤 인터프리터를 사용할지 지정한다PATH 환경변수에서 가장 우선시되는 인터프리터를 찾아 해당 스크립트 파일을 실행한다파이썬