ROS프로그래밍을 위한 환경 설정
Workspace
1. ROS에서 코딩을 하기 위해서는 Workspace 라는 공간이 필요하다.
- 다음과 같은 방법으로 'xycar_ws'라는 이름의 Workspace를 생성한다.(폴더 생성)
$ cdHome 폴더로 이동
$ mkdir -p ~/xycar_ws/src서브 폴더 생성
$ cd xycar_wsxycar_ws 폴더로 이동
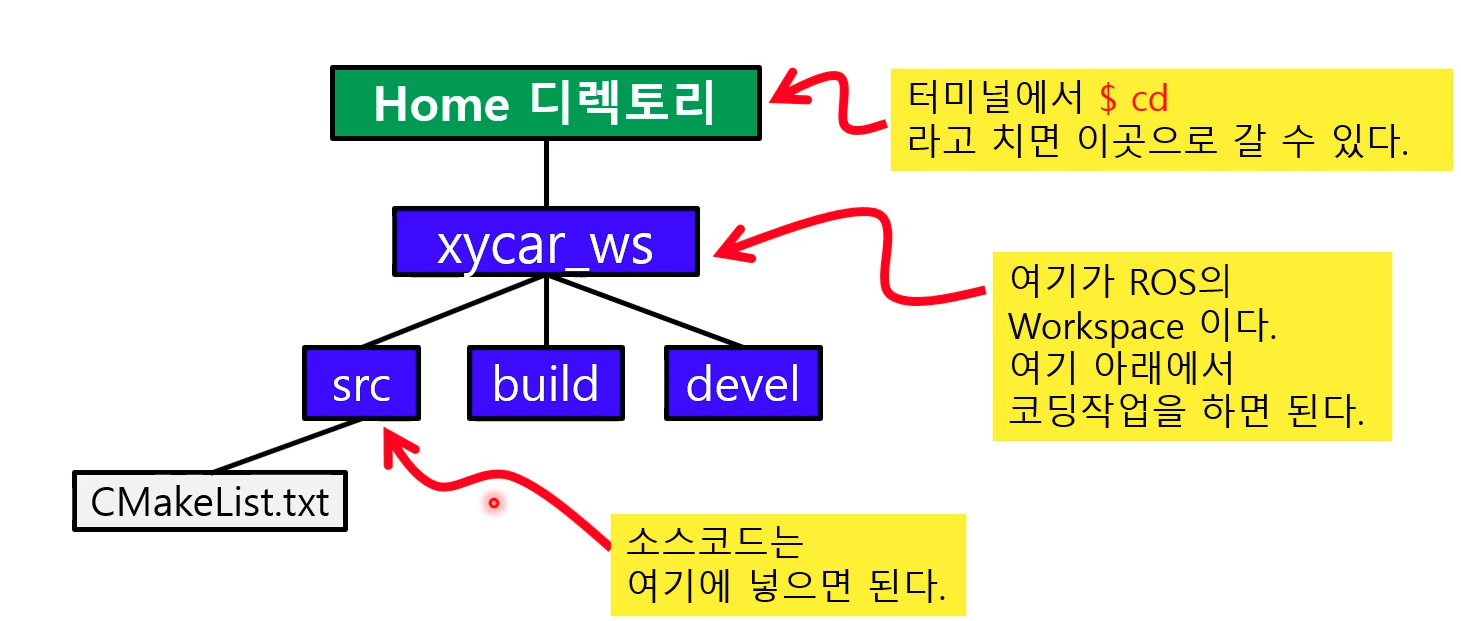
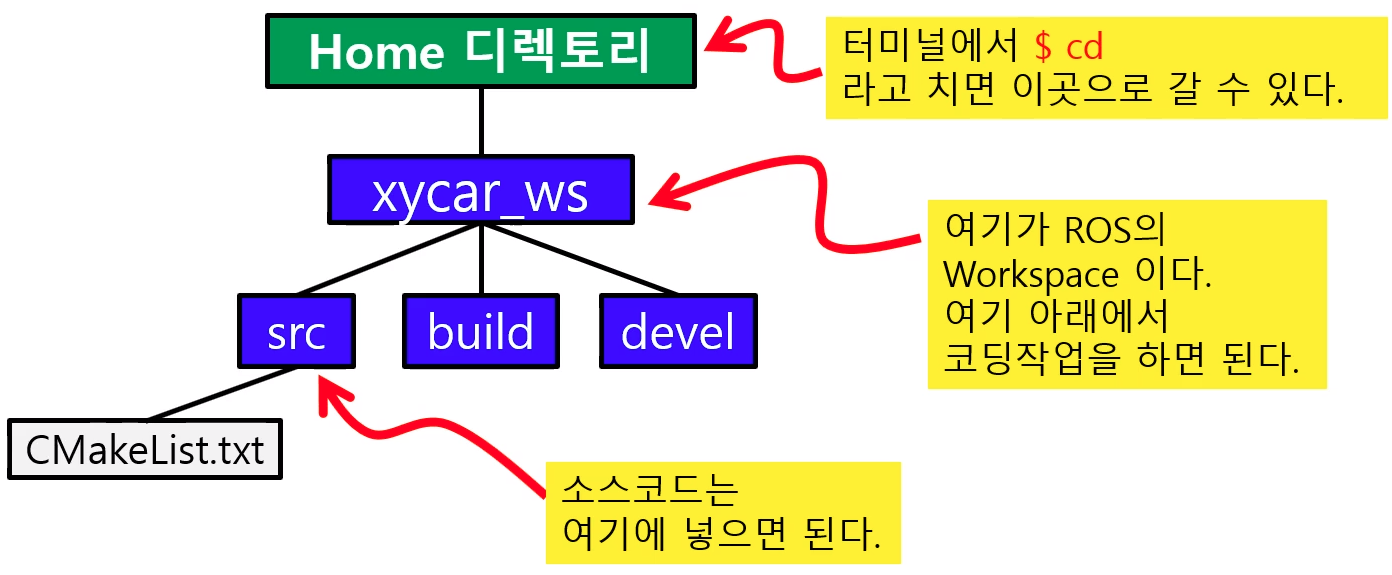
$ catkin_makeROS 코딩 환경 셋업과 정리(build)2. 앞서 작업이 끝나면 아래와 같은 구조의 Workspace가 만들어짐
- Workspace의 이름은 'xycar_ws'
- ROS 프로그래밍 작업은 Workspace에서 진행함.
- 소스코드는 /src 폴더 안에 만들면 됨.
Build 명령: catkin_make
1. ROS의 Workspace에서 새로운 소스코드 파일이나 패키지가 만들어지면
- catkin_make 명령을 통해 빌드(build) 작업을 진행한다.
- ROS 프로그래밍 작업과 관련 있는 모든 것들을 깔끔하게 정리해서 최신 상태로 만드는 작업이다.
ROS 작업환경 설정
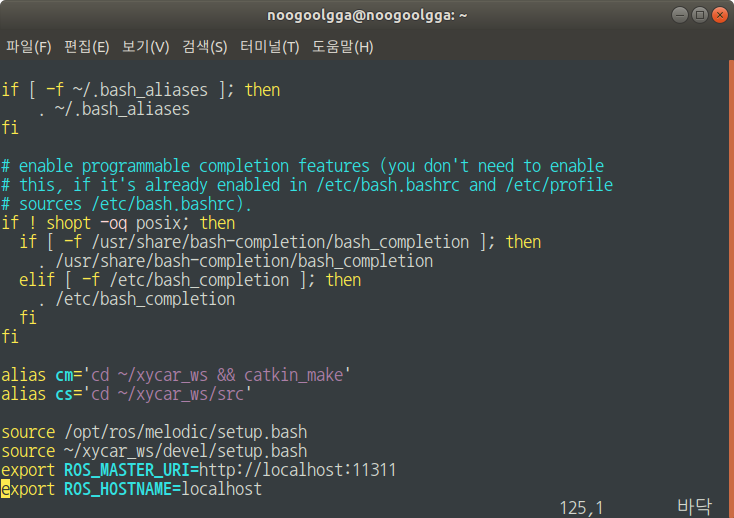
1. ROS 작업에 필요한 환경변수 설정
- 홈 디렉토리에 있는 .bashrc 파일을 수정
$ cd홈디렉토리로 이동
$ sudo vi ~/.bashrc작성
$ source .bashrc수정한 내용을 시스템에 반영
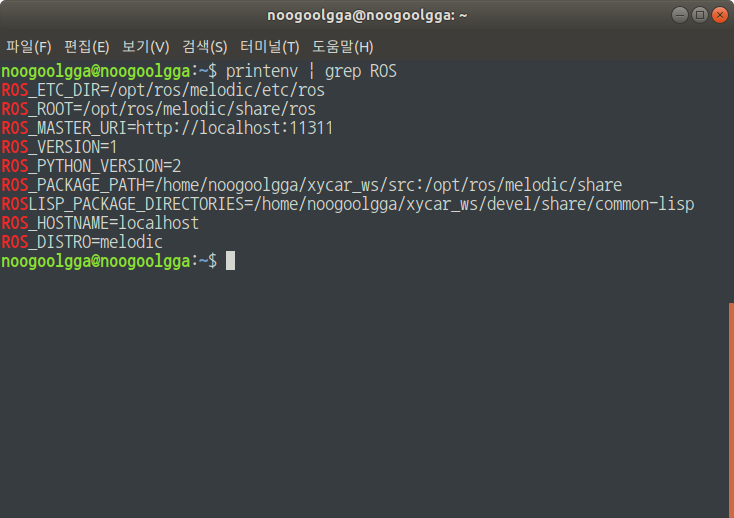
2. ROS 작업에 필요한 환경변수 설정 확인
$ printenv | grep ROS이 명령어로 ROS환경변수의 설정을 확인할 수 있다.