1. ROS Package 기초
ROS 패키지
- Package
ROS에서 개발되는 소프트웨어를 논리적 묶음으로 만든 것
$ rospack list
어떤 패키지들이 있는지 나열rospack find [package_name]
이름을 이용해서 패키지 검색roscd [location_name[/subdir]]
ROS 패키지 디렉토리로 이동rosls [location_name[/subdir]]
Linux ls와 유사(경로를 몰라도 이름 적용 가능)rosed [file_name]
(환경설정에 따른) 에디터로 파일을 편집
2. ROS Package 만들기
- package 담을 디렉토리로 이동
$ cd ~/xycar_ws/src
- package 새로 만들기
$ catkin_create_pkg [패키지이름] [패키지가 의존하고 있는 다른 패키지들 나열]
$ catkin_create_pkg my_pkg1 std_msgs rospy
- 예시
package 이름은 my_pkg1, package가 의존하고 있는 다른 패키지들은 std_msgs, rospy 2개 이다.
- 새로 만든 패키지를 빌드
$ cd ~/xycar_ws
$ catkin_make
-> $ cm 명령어로 한번에 실행할 수 있다.
~/.bashrc 파일에서 아래와같이 alias선언을 했기 때문에
alias cm = ' cd ~/xycar_ws && catkin_make'
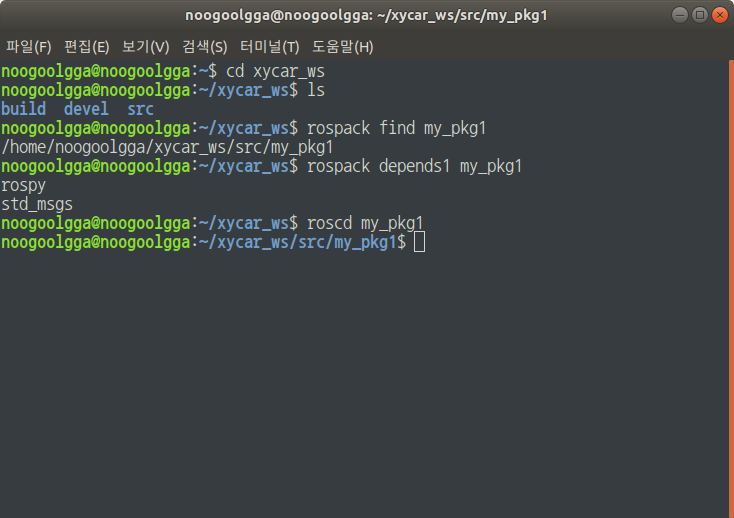
- 만들어진 패키지 확인
$ rospack find my_pkg1
패키지의 위치를 찾아준다
$ rospack depends1 my_pkg1
my_pkg1에서 의존하고 있는 다른 패키지들을 보여준다(rospy, std_msgs)
$ roscd my_pkg1
my_pkg1위치로 이동시켜준다
예시) ~/xycar_ws/src/my_pkg1/src에 pub.py 작성
import rospy
from geometry_msgs.msg import Twist
rospy.init_node('my_node', anonymous=True)
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
msg = Twist()
msg.linear.x = 2.0
msg.linear.y = 0.0
msg.linear.z = 0.0
msg.angular.x = 0.0
msg.angular.y = 0.0
msg.angular.z = 1.8
rate = rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(msg)
rate.sleep()
예시) ~/xycar_ws/src/my_pkg1/src에 pub.cpp 작성
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char** argv)
{
ros::init(argc, argv, "my_node", ros::init_options::AnoymousName);
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1);
geometry_msgs::Twist msg;
msg.linear.x = 2.0
msg.linear.y = 0.0
msg.linear.z = 0.0
msg.angular.x = 0.0
msg.angular.y = 0.0
msg.angular.z = 1.8
ros::Rate rate(1);
while(ros::ok())
{
pub.publish(msg);
msg.angular.z *= -1;
rate.sleep();
}
return 0;
}
예시) ~/xycar_ws/src/my_pkg1/src에 sub.py 작성
import rospy
from turtlesim.msg import Pose
def callback(data):
s = "Location: %.2f, %.2f" % (data.x, data.y)
rospy.loginfo(rospy.get_caller_id() + s)
rospy.init_node("my_listener", anonymous=True)
rospy.Subscriber("/turtle1/pose", Pose, callback)
rospy.spin()
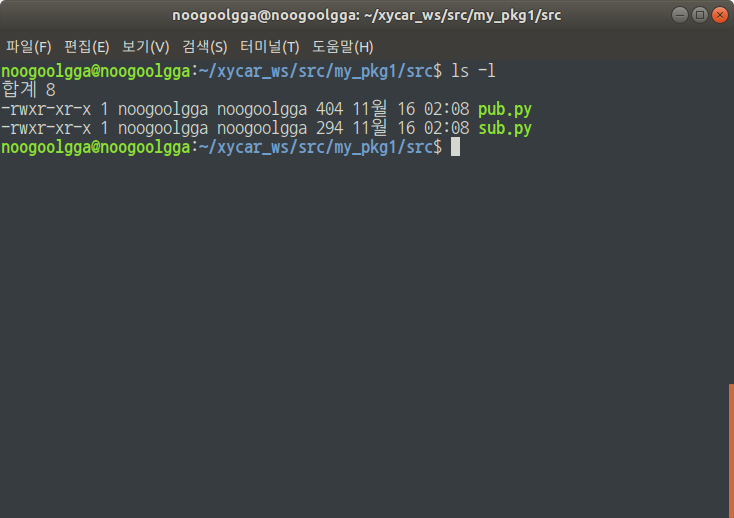
프로그램 실행 권한
- 작성한 파이썬 코드를 실행시키기 위해선 실행권한이 있어야 한다.
- 다음과 같은 방법으로 실행권한을 부여한다.
$ chmod +x pub.py
$ ls -l 명령으로 실행권한 여부를 확인할 수 있다.
3. ROS 프로그램의 실행과 검증 확인
프로그램 실행 방법
- terminal#1에서
$ roscore
- terminal#2에서
$ rosrun turtlesim turtlesim_node
- 조금 전 만든 pub.py 프로그램을 실행시킨다.
$ chmod +x pub.py
$ rosrun my_pkg1 pub.py
$ rosrun [패키지이름] [실행할프로그램]
4. Launch 파일 기초
launch파일 사용하기
$ roslaunch
*.launch파일 내용에 따라 여러 노드들을 한꺼번에 실행시킬 수 있다.
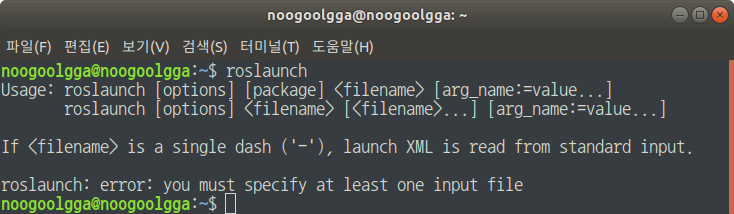
- roslaunch 사용법
$ roslaunch [패키지이름] [실행시킬 launch파일 이름]
- e.g)
$ roslaunch my_pkg1 aaa.launch
- 이때 [실행시킬 launch 파일]은 반드시 패키지에 포함된 launch 파일이어야 함.
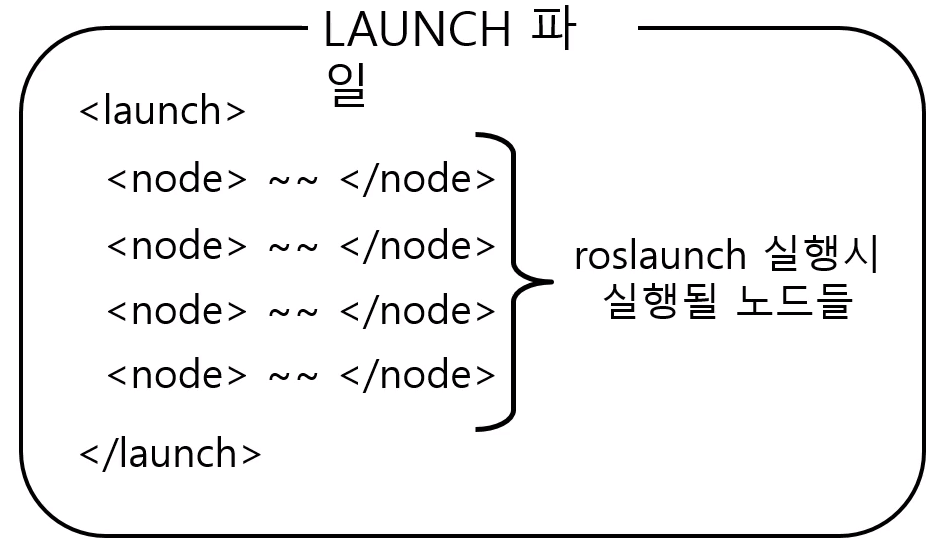
*.launch파일
- roslaunch 명령어를 이용하여 많은 노드를 동시에 실행시키기 위한 파일
- 실행시킬 노드들의 정보가 XML 형식으로 기록되어 있음.
5. Launch 파일 tag 활용
*.launch에서 사용하는 Tag : node
node 태그
- 실행할 node 정보를 입력할 때 사용되는 태그
<node pkg="패키지명" type ="노드가 포함된 소스파일 명" name="노드 이름" />
- e.g
<node pkg="my_pkg1" type="pub.py" name="pub_node" />
- 속성
- pkg: 실행시킬 노드의 패키지 이름을 입력하는 속성
- type: 노드의 소스코드가 담긴 파이썬 파일의 이름을 입력하는 속성
- 이때 파이썬.py 파일은 반드시 실행권한이 있어야 한다
- 실행권한이 없을 시 다음 에러 발생
ERROR: cannot launch node of type [패키지명/소스파일명]: can't locate node [소스파일명] in package [패키지명]
- name: 노드의 이름을 입력하는 속성
- 소스코드에서 지정한 노드의 이름을 무시하고 launch파일에 기록된 노드의 이름으로 노드가 실행됨.
include 태그
- 다른 launch 파일을 불러오고 싶을 때 사용하는 태그
<include file= "같이실행할 *.launch파일경로 />
- e.g)
<include file="../cam/cam_test.launch /">
<include file="$(find sub_cam)/src/launch/aaa.launch" />
- 속성
- file: 함께 실행시킬 *.launch파일의 경로를 입력하는 속성
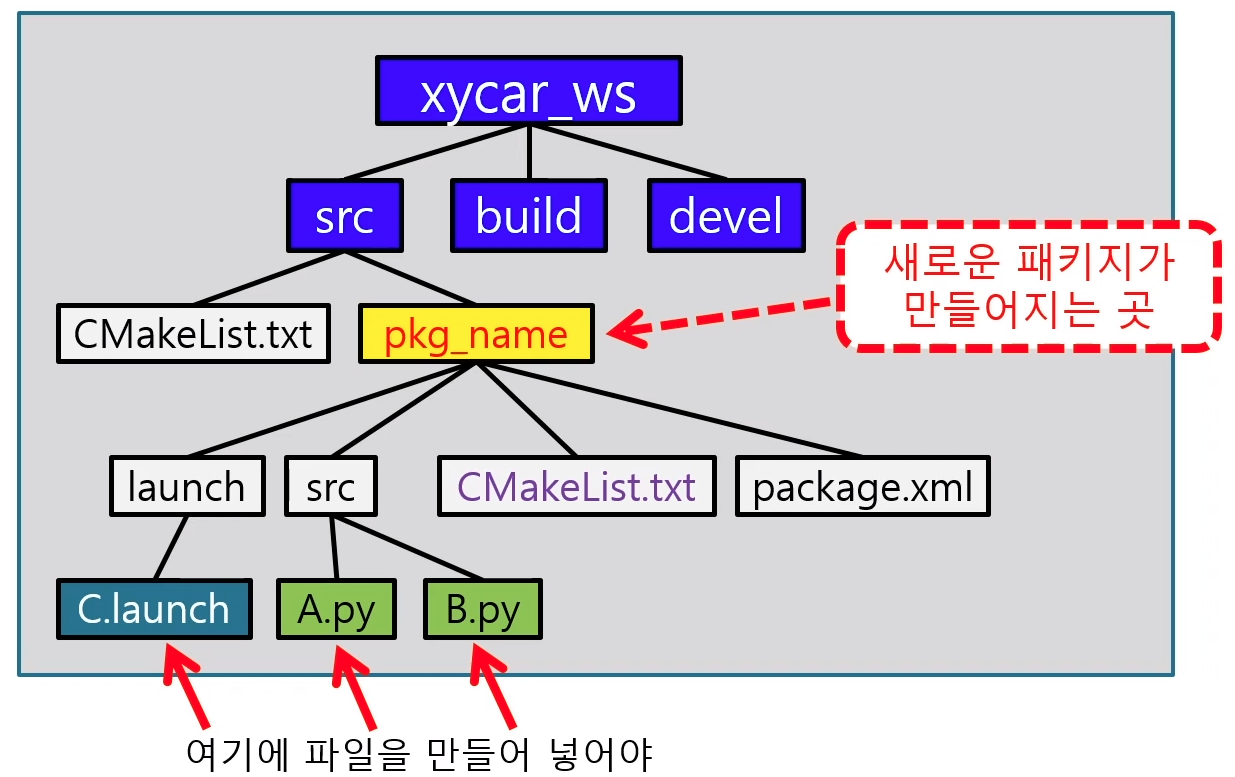
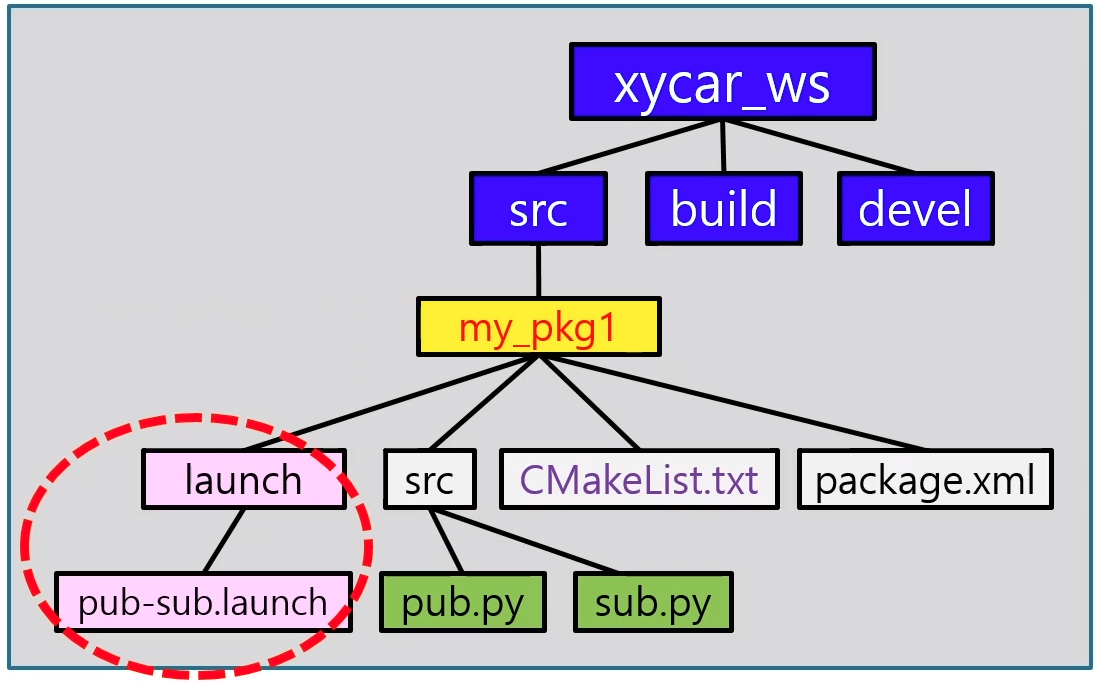
launch 파일의 위치
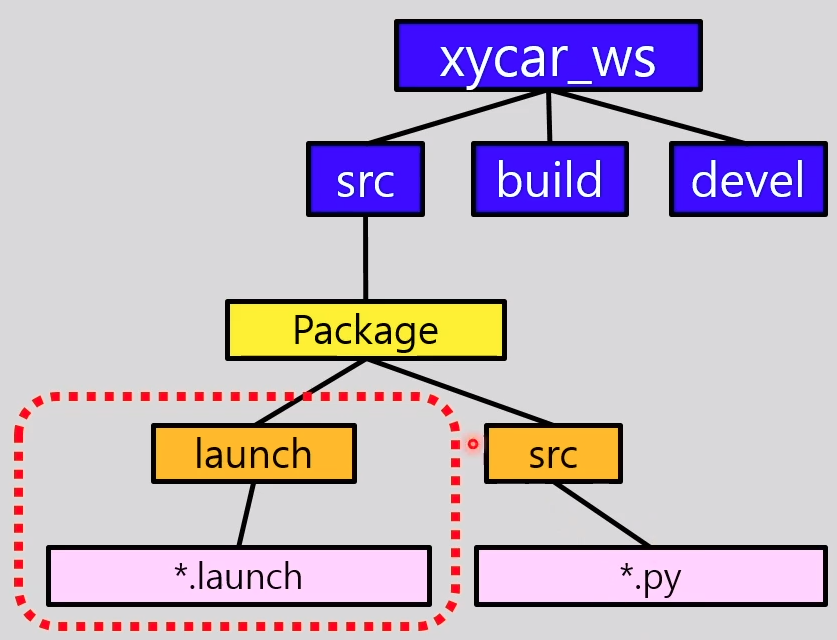
launch 파일 생성
- 패키지 디렉토리 아래에 'launch' 라는 디렉토리를 만들고
- 그 안에 .launch 확장자의 파일을 만들어야 함
launch 파일 작성
launch 파일 실행
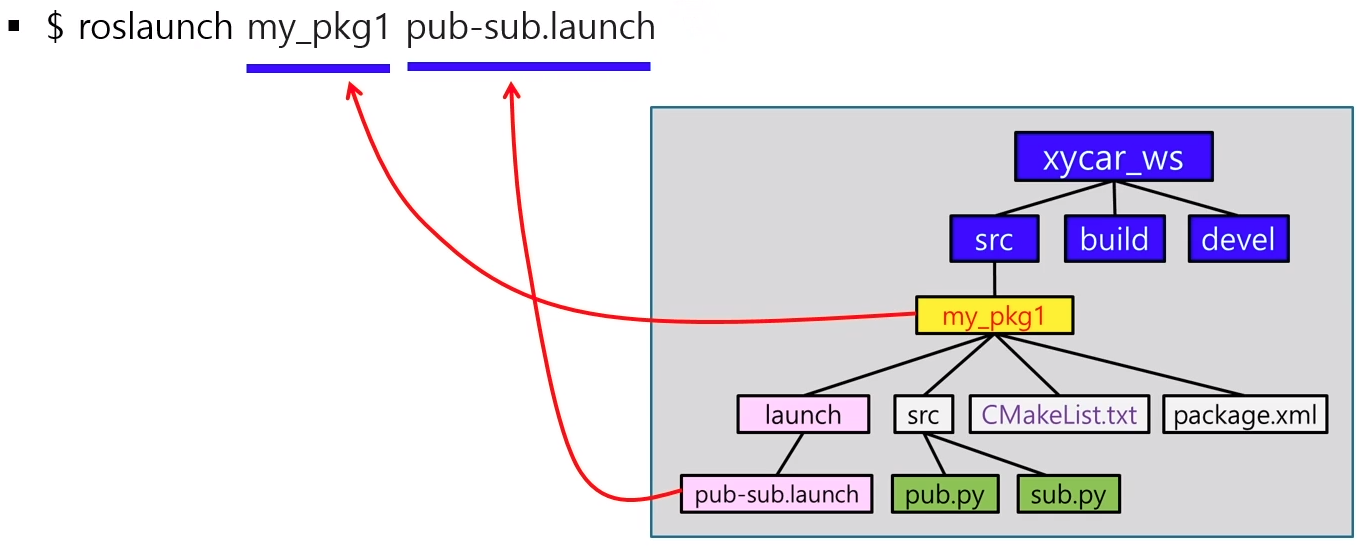
- launch파일 실행 방법
$roslaunch my_pkg1 pub-sub.launch
$ roslaunch 명령을 사용할 때는
- 별도로
$ roscore 명령을 실행할 필요가 없다
- 내부적으로 roscore가 자동으로 실행된다
정리
$ cd ~/xycar_ws/src/my_pkg1
$ mkdir launch
$ cd ~/xycar_ws/src/my_pkg1/launch
$ vi pub-sub.launch
$ cm
$ roslaunch my_pkg1 pub-sub.launch

*.launch에서 사용하는 Tag: param
- param 태그
- ROS 파라미터 서버에 변수를 등록하고 그 변수에 값을 설정하기 위한 태그
<param name="변수의 이름" type="변수의 타입" value="변수 값" />
- 속성
- name: 등록할 변수의 이름
- type: 등록할 변수의 타입. 사용할 수 있는 타입의 종류는 str,int,double,bool,yaml
- value: 등록할 변수의 값
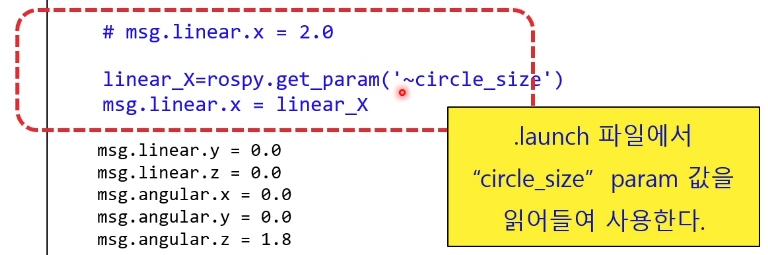
- ROS 파라미터 서버에 등록된 변수는 노드 코드에서 불러와 사용할 수 있음
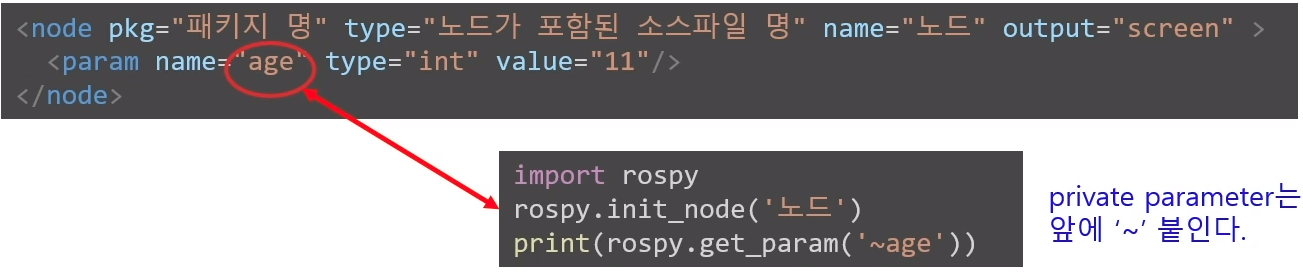
launch 파일에서 파리미터 전달 예시