파이썬 예제코드 분석
- 2개 파일의 소스코드 분석
- teacher.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
rospy.init_node('teacher')
pub = rospy.Publisher('my_topic',String)
rate = rospy.Rate(2)
while not rospy.is_shutdown():
pub.publish('call me plz')
rate.sleep()- student.py
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(msg):
print msg.data
rospy.init_node('student')
sub = rospy.Subscriber('my_topic',String,callback)
rospy.spin()파이썬 예제코드 분석: teacher.py
#!/usr/bin/env python
- 파일의 첫 줄에 #! 로 시작되는 라인을 Shebang 라인이라고 한다
- 스크립트 파일의 첫 줄에 사용된다
- 해당 파일의 실행에 어떤 인터프리터를 사용할지 지정한다
- PATH 환경변수에서 가장 우선시되는 인터프리터를 찾아 해당 스크립트 파일을 실행한다
- 파이썬의 경우
- 파이썬에서 #로 시작되는 라인은 코멘트로 간주되므로 소스코드에 미치는 영향은 없다
- PATH 환경변수에서 갖아 우선되는 python 바이너리를 찾아 해당 파이썬 파일을 실행한다
- 터미널에서
$python teacher.py명령으로 실행시킬수도 있지만 - Shebang 라인이 들어간 경우엔 그냥
$./teacher.py형식으로 직접 실행시킬 수 있다. - 파이썬 버전 구분해서 지정할 때도 사용
- #!/usr/bin/env python2.6
- #!/usr/bin/env python3
import rospy- rospy라는 라이브러리를 import해서 사용하겠다 라는 뜻이다.
- import 키워드는 모듈, 패키지, 파이썬 표준 라이브러리 등을 가져온다
- 모듈은 특정기능을 python 파일 단위로 작성한 것이고,
- 패키지는 특정 기능과 관련된 여러 모듈을 묶은 것이다.
- 파이썬 표준 라이브러리는 파이썬에서 기본적으로 설치된 모듈과 패키지를 묶은 것이다.
- rospy는 ROS의 파이썬 클라이언트 라이브러리이다.
- rospy를 이용하면 파이썬 프로그래머들에게 빠르게 ROS Topics, Services, Parameter의 interface를 사용할 수 있다.
- 파이썬으로 ROS 프로그래밍을 할때 필수적인 라이브러리이다.
- rospy는 실행속도보다는 구현의 편의성을 더 중요하게 생각하였기 때문에 빠르게 prototype을 만들 수 있다.
from std_msgs.msg import String- from import는 모듈의 일부를 가져올 수 있는 키워드이다.
- from 뒤에 모듈 이름을 지정하고 import 뒤에 가져올 변수, 함수, 클래스를 입력한다.
- import 뒤에 여러 개를 넣어도 된다.
- 위의 경우 std_msgs.msg라는 모듈에서 String 관련 부분만 가져와 사용하겠다는 의미이다.
- import로 모듈을 불러올 때 사용자가 직접 별명(모듈 이름)을 설정할 수 있다.
- 별명을 붙이려면 'import math as 별명' 처럼 지정하면 된다.
- import numpy as np -> numpy라는 모듈을 사용할건데 그 이름을 np로 해서 사용
rospy.init_node('teacher')- 해당 노드를 초기화 하고 노드의 이름을 'teacher'로 한다는 코드이다.
- 많은 노드들을 관리하고 통합하는 것이 ROS프레임워크가 하는 일이고 그것을 Python으로 만든 것이 rospy 라이브러리이다.
- init_node는 rospy에서도 기본적인 함수이며 이 함수를 사용하여 생성된 노드는 다른 노드와 통신하면서 topic을 주고 받을 수 있다.
- ROS 시스템 상에서 노드들이 topic을 주고받기 위해서는 노드에 고유의 이름을 할당해야 한다.
- 위 코드의 경우에는 노드의 이름이 'teacher'가 된다.
- 노드의 이름에는 '/' slash와 같은 namespaces를 포함할 수 없다.
- init_node() 함수를 자세히 살펴보면
- def init_node(name, argv = None, anonymous = False, log_level = None, disable_rostime = False, disable_rosout = False, disable_signals = False, xmlrpc_port = 0, tcpros_port = 0):
- 첫번째 인자는 node의 이름이다. 타입은 String이다.
- 두번째 인자는 argv인데 사용자가 지정한 argument를 넘겨받을 때 사용. 타입은 string의 list이다.
- 세번째 인자는 anonymous라는 것인데 default가 False로 되어 있다. 만약 True라면 노드의 이름이 자동으로 생성된다. (name 위에 임의의 숫자를 붙여준다)
- 사용자가 같은 노드의 여러 instance를 원하고, 실제 이름에 신경 쓰고 싶지 않을 때 유용하다.
- 네번째 인자는 log_level이다. 타입은 int이며, default로 info 레벨이다.
- rospy.DEBUG, rospy.INFO, rospy.ERROR, rospy.WARN, rospy.FATAL등을 사용 할 수 있다.
- 다섯번째 인자는 disable_rostime이다. 내부적인 테스트에만 사용된다
- 여섯번째 인자는 disable_rosout이다. 내부적인 테스트에만 사용된다
- 일곱번째 인자는 disable_signals이다.
- True라면, rospy는 사용자의 signal handler를 등록하지 않는다.
- 사용자가 main thread로부터 init_node를 call하지 않을 때나, 혹은 사용자가 자신만의 signal handling을 설정해야 하는 환경에서 ropsy를 사용할 때 이 flag를 셋팅해야 한다.
- 여덟번째 인자는 xmlrpc_port이다. client XMLRPC node에 대한 포트번호 이다.
- 아홉번째 인자는 tcpros.port이다. TCPROS server는 이 포트를 통해 통신하게 된다.
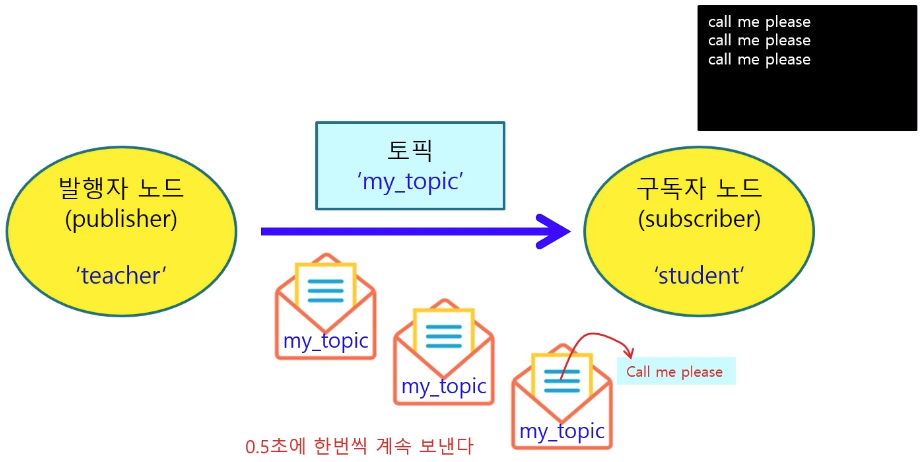
pub = rospy.Publisher('my_topic',String)- 'my_topic'이라는 이름의 토픽을 발행하겠다고 ROS 시스템에 자신을 publisher로 등록하는 부분이다.
- 그리고 'my_topic'이라는 토픽에 담는 메세지의 데이터 타입은 String 이다 라고 지정하는 부분이다.
- String은 위에서 선언했던 "from std_msgs.msg import String"에서의 String이다.
- 나중에 String 타입의 메세지를 담아서 my_topic이라는 이름의 토픽을 팔행하려면 아래와 같이 코딩하면 된다.
- pub.publish('call me plz')
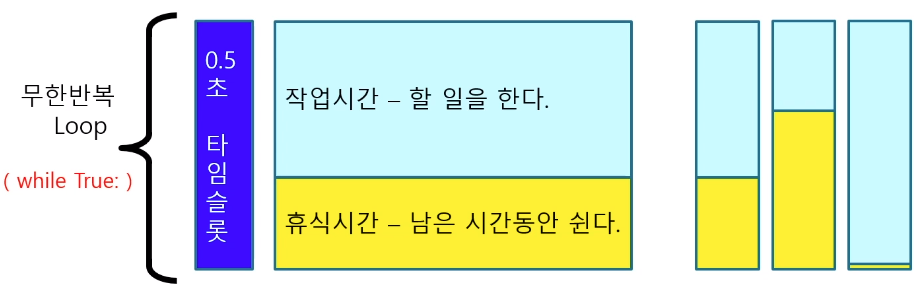
rate = rospy.Rate(2)- 1초에 2번 loop를 반복할 수 있도록 rate라는 객체를 만드는 코드이다.
- 1초 안에 2번 반복 = 0.5초에 한번씩 루프를 돌아야 한다는 의미.
- 0.5초에 루프를 한번씩 돌기 위해서 0.5초짜리 타임슬롯을 만든다
- loop안에 있는 타임슬롯에 할당된 시간을 모두 소모한 후에 다시 loop를 반복
while not rospy.is_shutdown():- rospy.is_shutdown()이 True가 될 때 까지 while loop안에 있는 실행문들을 반복하겠다는 뜻이다.
- rospy.is_shutdown() 함수는 rospy 내부의 shutdown_flag를 검사한다.
- 간단하게 ROS 시스템이 shutdown 되었는지의 여부를 검사하는 함수이다.
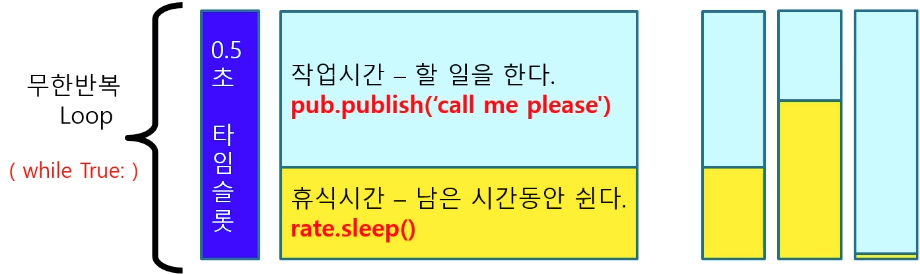
pub.publish('call me plz')- pub은 'my_topic'라는 이름의 토픽을 발행하기 위해 만든 Publisher인스턴스이다.
- publish는 토픽에 데이터를 담아서 발행하는 가능을 수행한다.
- publish는 2가지의 Exception이 일어나는데
- ROSException는 rospy 노드가 initialization되지 않았을 때 생기는 에러이다. 노드는 init_node 함수로 이름을 할당해 주어야 한다.
- 또 다른 에러는 ROSSerializationException이다. 이것은 message를 serialize할 수 없을 때 일어난다. 이것은 보통 type error일 때가 많다.
rate.sleep()- rate는 rate=rospy.Rate(2)에서 만들어진 인스턴스 이다.
- rate.sleep() while루프 안에서 호출된다
- rate.sleep() 코드 때문에 while루프가 0.5초마다(1초에2번) 반복된다
- 결과적으로 while 안에 있는 pub.publish 코드가 0.5초에 한번씩 동작하게 된다.
파이썬 예제코드: student.py
def callback(msg):- 'callback'이라는 이르므이 함수를 정의한다는 뜻이다.
- python에서 함수를 정의하는 방법은 def키워드를 사용하는 것이다.
def function_name(parameter):로 함수를 선언하고 그 밑에 함수에 대한 코드를 작성한다.
- 함수를 사용하고자 할 때는 우선 함수를 선언하고 나서 함수 호출을 원하는 곳에
function_name(parameter)코드를 넣으면 된다. - 함수를 정의할 때, 함수 호출보다 위에 있어야한다. 만약 밑의 코드를 실행한다면 정의되지 않은 함수를 호출하였다고 에러가 난다.
print msg.data- 이 코드는 msg.data를 화면에 출력하는 코드이다.
- print 함수는 Python의 기본적인 함수로써 사용자가 어떤 값을 콘솔화면으로 출력할 수 있도록 해 준다.
- rospy는 공식적으로 python2 버전을 사용한다. python2에서는 print문을 사용할 때 괄호를 사용하지 않는다.
- 프린트 작업시 Object뜰을 string으로 내부적으로 바꿔주므로 변수를 넣어도 string으로 변환되어 출력이 가능하다.
rospy.init_node('studnet')- teacher.py에 똑같은 함수가 사용되므로 그 부분의 설명으로 대체한다.
- 이 코드를 통해
student라는 이름의 노드가 새로 만들어진다
rospy.init_node('student')- teacher.py에 똑같은 함수가 사용되므르 그 부분의 설명으로 대체한다.
- 이 코드를 통해
student라는 이름의 노드가 새로 만들어진다
sub = rospy.Subscriber('my_topic',String, callback)- 이번에 만든 노드는 토픽을 받는 구독자(subscriber)임을 선언한다.
- 받고자 하는 토픽의 이름은 'my_topic'이다.
- 그 토픽 안에 담긴 데이터는 String 타입이다.
- 토픽이 도착할 때마다 'callback'함수를 실행시킬 것을 ROS 시스템에 요청한다.
- 결과적으로 토픽(메세지)을 받을 때마다 callback 함수가 한번씩 호출된다.
- 해당 callback 함수는 앞서 (6)처럼 미리 정의되어 있어야 한다.
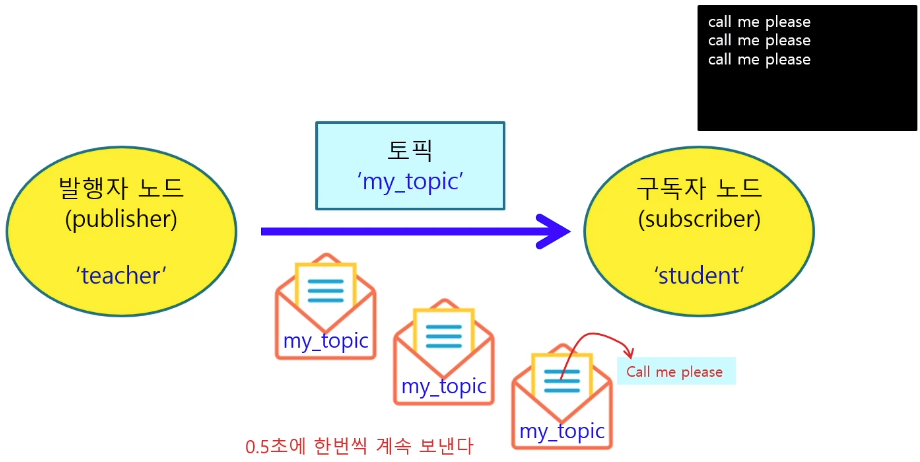
정리 student.py와 teacher.py의 상호 동작
- teacher.py에서는
- node의 이름을
teacher로 설정한다 my_topic라는 이름의 topic을 발행하는 걸로 설정한다call me plz라는 message를 발행한다.- 그리고 1초에 2번 반복하게끔 sleep하는 함수를 사용한다.
- 이걸 node가 종료될 때까지 무한반복한다.(결국 계속해서 1초당 2번씩 토픽(메세지)를 보낸다)
- node의 이름을
- student.py에서는
- node의 이름을 'student'로 설정한다
my_topic라는 topic을 구독하는 걸로 설정한다- callback함수를 정의하여
my_topic토힉이 올때마다 그 안에 담긴 data를 출력하게끔 준비한다 - 무한반복 루프에 들어간다
- 동작결과
- teacher노드가
my_topic라는 이름의 topic에call me plz문자열을 담아 보내면, student노드가 해당 topic을 받아 그 안에 담긴 문자열에 꺼내 화면에 출력한다.
- teacher노드가