Convolution
Convolution f * h
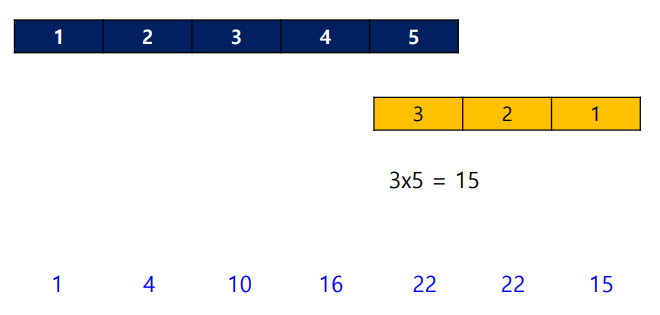
Step 1. Flip the function h.
Step 2. Cross-multiply and sum the nonzero overlap terms.
Step 3. Slide h to the right by one position.
Step 4. Repeat until all the output values are zero.
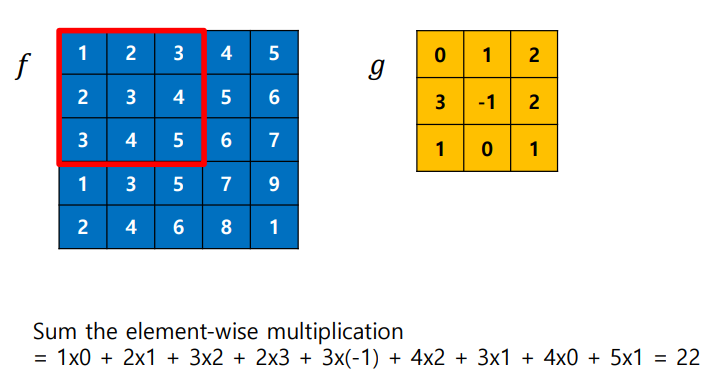
2D Convolution
The result of convolution must be two dimensional.
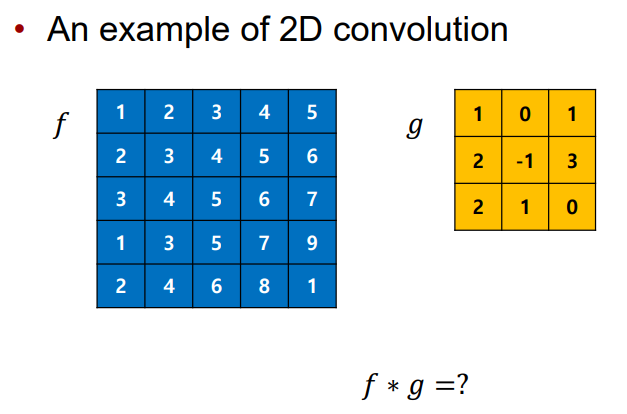
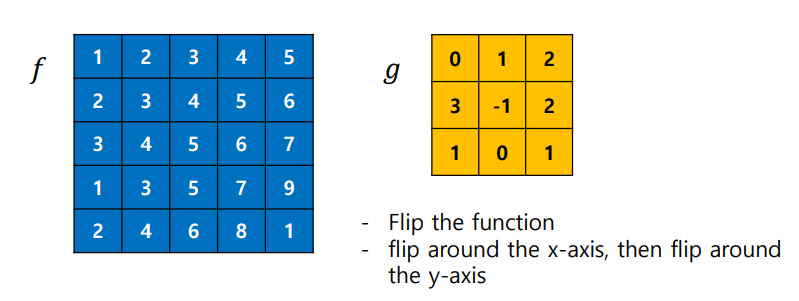
Step 1. Flip the function g
Step 2. Cross-multiply and sum
Convolution의 의미
- Convolution의 결과 == Input image에 특정 filter를 적용한 결과
- Convolution을 사용하여 feature의 강도를 추출할 수 있다.
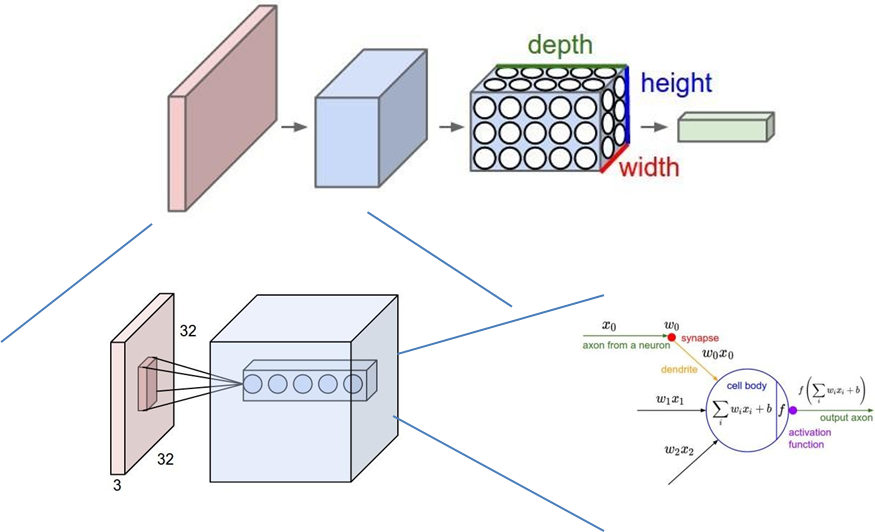
Convolutional Neural Network
- CNN requires far fewer parameters than FC by using Parameter Sharing.
- FC는 연산량이 너무 많기에 영상 처리에 불리함.
- FC는 한 노드가 모든 노드에 연결되어 있음.
- CNN은 input의 특정 영역과만 연결되어 있어서, 필요한 parameter가 적음.
Parameter Sharing이란?
Parameter Sharingmeans that the same weight matrix acts on all the neurons in a particular feature map. The same filter is applied in different regions of the image.- Training하고자 하는 파라미터에만 필터가 적용됨.
-> 그 필터를 움직이며 각 영역에서 feature map(output)을 계산한다.
-> 즉 모든 영역에서는 필터만 sharing한다.
Simple architecure of CNN
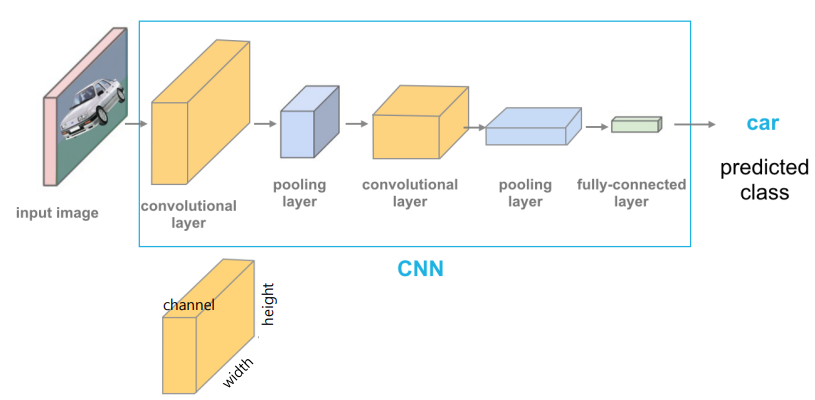
Conv layer
- Channel(depth)가 변한다. Feature map 컨트롤
Pool layer
- Feature map은 유지하고 Width 컨트롤. 이미지를 작게 만든다.
FC layer
- 3D를 1D로 변환
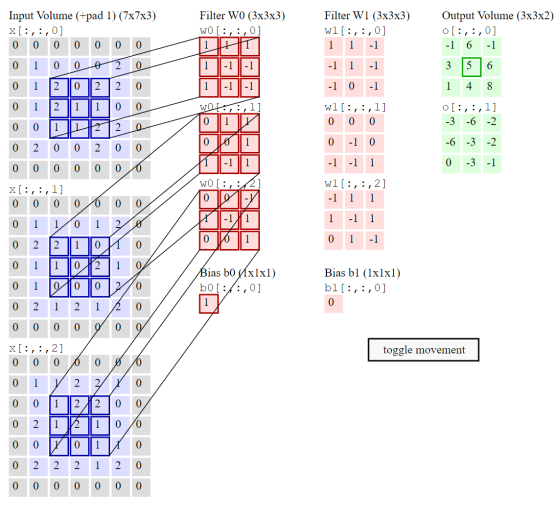
왜 conv layer를 거치면 channel 수가 변할까?
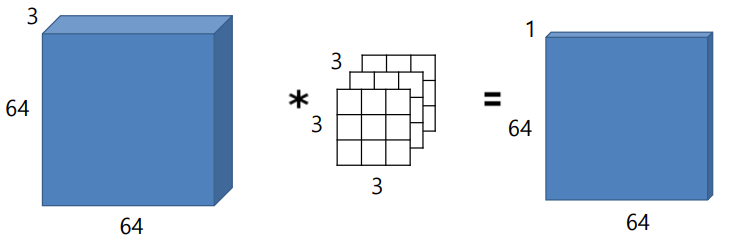
- input이 3x64x64이고 kernel은 3x3인 경우
- 어떻게 kernel을 곱해야 output이 2D가 될까?
- kernel도 3장으로 맞추어 줘야 3x64x64와 사이즈가 맞아서 output이 2D가 될 수 있다.
- The channel of a conv layer is the same as the number of kernels.
- Output channel is not related to input channel.
계산해보기https://cs231n.github.io/convolutional-networks/
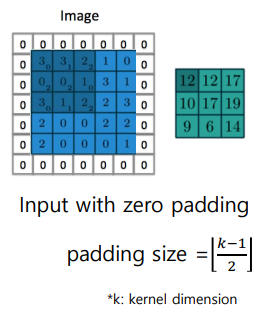
Padding
- Conv layer를 거치면서 input에 비해 output size가 줄어드는 문제
- Border에 padding을 주어 해결한다.
Receptive field
- Kernel(filter) size
- Output에 영향을 주는 spatial size
- CNN에서 초반에는 좁은 범위, 특정 영역의 feature만 확인하다가
레이어가 깊어질 수록 receptive field 사이즈를 증가시켜서 큰 범위를 본다.
더 high level 정보, 전체적인 정보를 얻을 수 있다.
Receptive field를 증가시키는 방법 두 가지
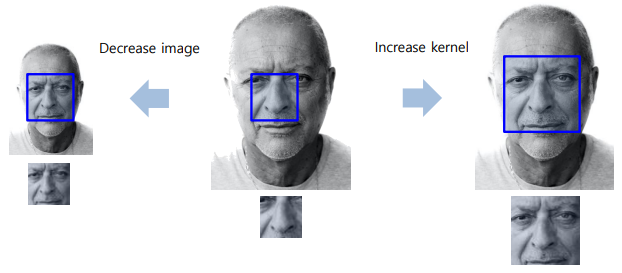
- Increase the Kernel size -> 연산량이 늘어난다는 단점
- Decrease the image(or input) size -> 적합
Image size를 줄이는 방법 두 가지: Stride and Pooling
Stride
- Stride is the step of a convolution operation.
- If the stride is 2, the output size is halved.
- 커널 이동 보폭
Pooling
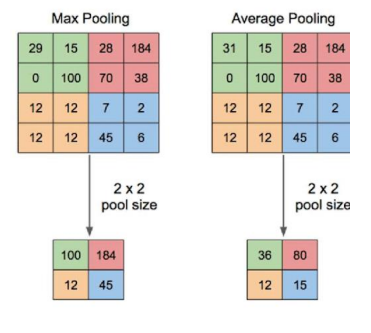
- Choose a representative value from a region
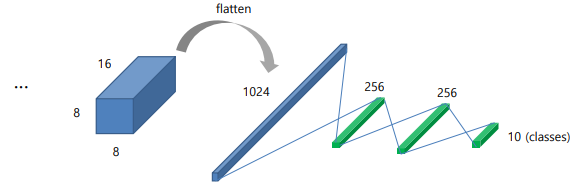
Fully connected layer
- Network 마지막에 fully-connected layer 있음.
- FC 전에
feature extraction layers가 있고, FC는classification layers로 칭함 - CNN과 FC를 연결할 때,
flattenorlinear연산을 수행한다. - Last layer를 1D로 변환
1 X 1 convolution
- Convolution 은 1x1 사이즈의 filter를 사용한다.
Channel 수 조절|연산량 감소|Non-linearity
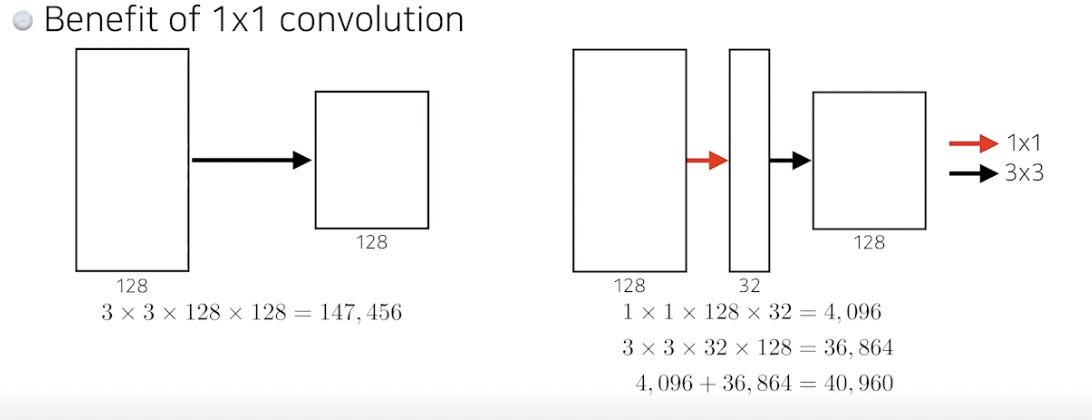
- Computation complexity를 줄인다.
- 연산량이 줄어들면, 더 많은 feature를 training할 수 있다.
- Nonlinear 계산이 더 많아지므로 performance가 증가한다.
📌 Note
- CNN이 이미지에 유리한 이유, 왜 필요한 파라미터가 적은지
- 1x1 conv의 역할
References

Übermensch