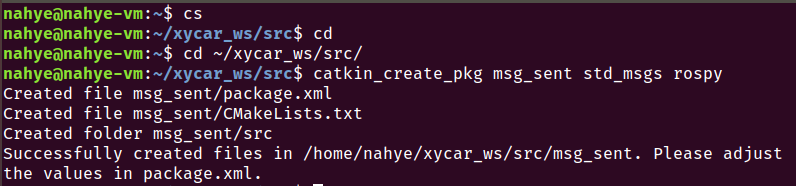
1. 패키지 생성
$ cd ~/xycar_ws/src/
또는
$ cs (alias로 미리 지정해놨기 때문)
$ catkin_create_pkg msg_send std_msgs rospy
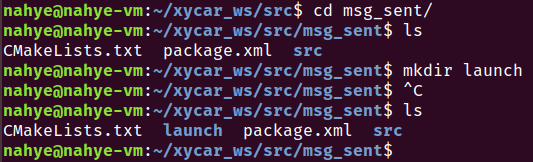
2. launch 디렉토리 만들기
$ cd msg_send/
$ mkdir launch
3. 새로 만든 패키지 빌드
$ cm
또는
$ catkin_make
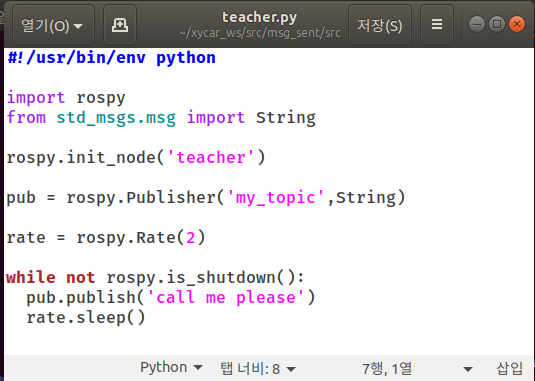
4. teacher.py와 student.py 작성
$ cd src/msg_send/src/
$ gedit teacher.py
import rospy
from std_msgs.msg import String
rospy.init_node('teacher')
pub = rospy.Publisher('my_topic',String)
rate = rospy.Rate(2)
while not rospy.is_shutdown():
pub.publish('call me please')
rate.sleep()
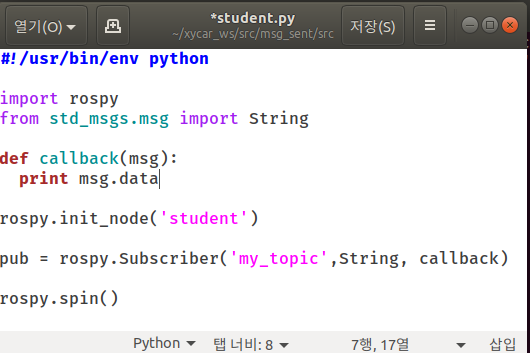
import rospy
from std_msgs.msg import String
def callback(msg):
print msg.data
rospy.init_node('student')
pub = rospy.Subscriber('my_topic',String, callback)
rospy.spin()
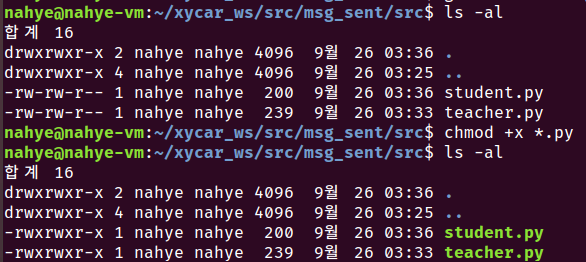
5. 파이썬 파일 권한 부여
$ chmod +x *.py
또는
$ chmod +x teache.py student.py
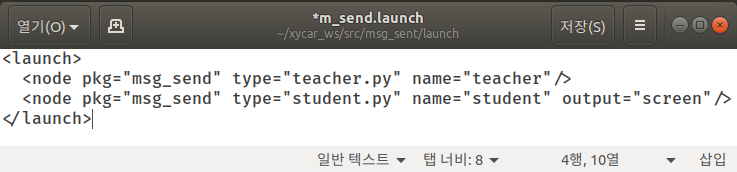
6. launch 파일 작성 후 빌드
$ launch 디렉토리로 이동
$ gedit m_send.launch
$ cm
<launch>
<node pkg="msg_send" type="teacher.py" name="teacher"/>
<node pkg="msg_send" type="student.py" name="student" output="screen"/>
</launch>
7. roslaunch 실행
$ roslaunch msg_send m_send.launch
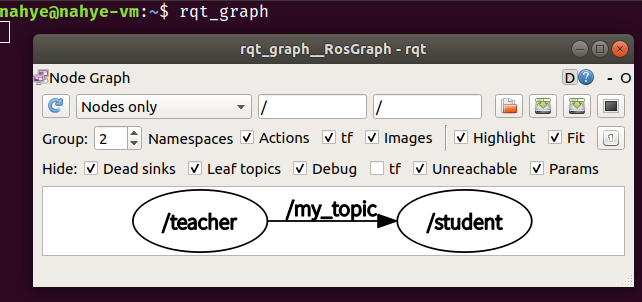
8. 확인
$ rqt_graph