boostcamp
1.Boostcamp - week 1 학습 정리

9/19부터 Boostcamp 4기의 본격적인 일정이 시작되었다. 일주일동안 따라가느라 급급해서 정리를 제대로 하지 못했지만 느낀 점 위주로 정리하려고 한다.
2022년 9월 23일
2.Boostcamp-220927 학습정리
딥러닝에서 가장 기초가 되는 레고 블럭인 nn.module에 대해 다룬다.
2022년 9월 27일
3.Resnet
CVPR 2016
2022년 10월 6일
4.Boostcamp-221012 학습정리
사람은 지각을 통해 세상과 상호작용한다.
2022년 10월 12일
5.Boostcamp - 221012 (2) Data augmentation
딥러닝은 데이터가 무조건 많이 필요함. 근데 모두 레이블 되어있는 거대 데이터를 얻기란 쉽지 않음.
2022년 10월 12일
6.Boostcamp-221014 학습정리
이미지의 픽셀 단위로 classification개체를 따라 분류하는 것이 아님.
2022년 10월 14일
7.Boostcamp-221017
Object Detection 영상 인식보다 어려움. 물체가 몇개인지 어디에 있는지 classification 도 해야함. 무인차 운영에 단골로 등장하는 기술임. OCR 기술도 마찬가지. Two-stage Detector 딥러닝 전에 어떤 기술로 object d
2022년 10월 17일
8.Pytorch - with torch.no_grad()와 model.eval()
모델의 성능을 측정할 때 코드에 꼭 들어가는 내용이 있다.with torch.no_grad()와 model.eval().
2022년 10월 21일
9.Pytorch - CrossEntropyLoss()
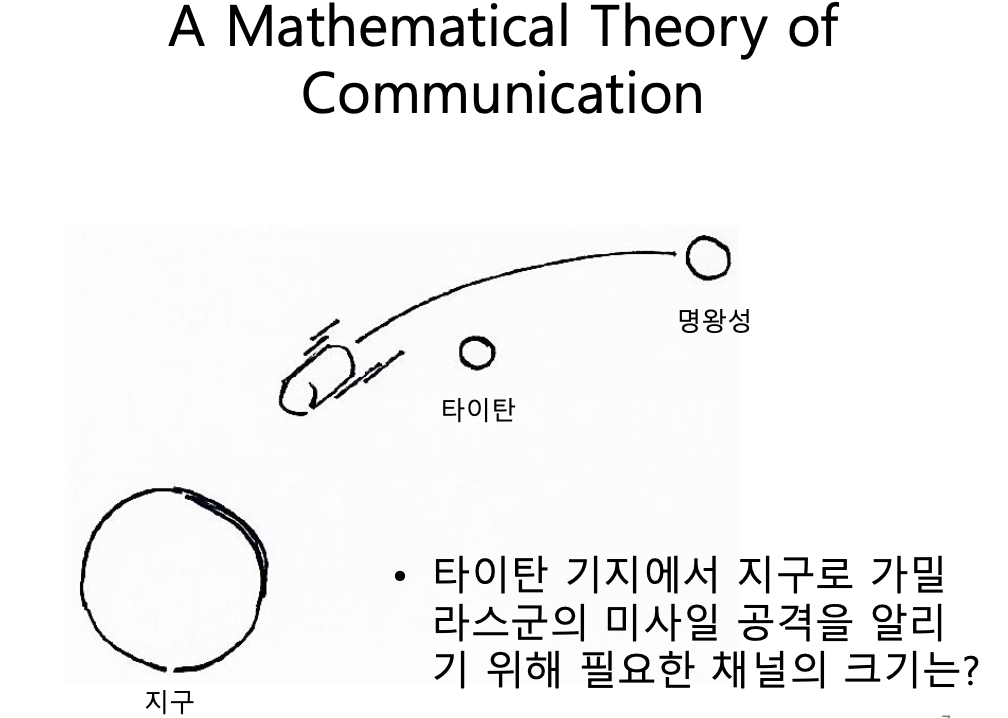
다음과 같은 상황을 생각해보자. Attack or No Attack 두 가지만 표현할 수 있으면 된다. 즉, 0 or 1. 1비트면 가능하다. 만약, 동서남북 4개의 공격 방향을 추가로 더 알리고 싶다면 어떻게 될까?
2022년 10월 21일