Pose Estimation 논문 리뷰
1.[논문] Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image[ICCV 2019]
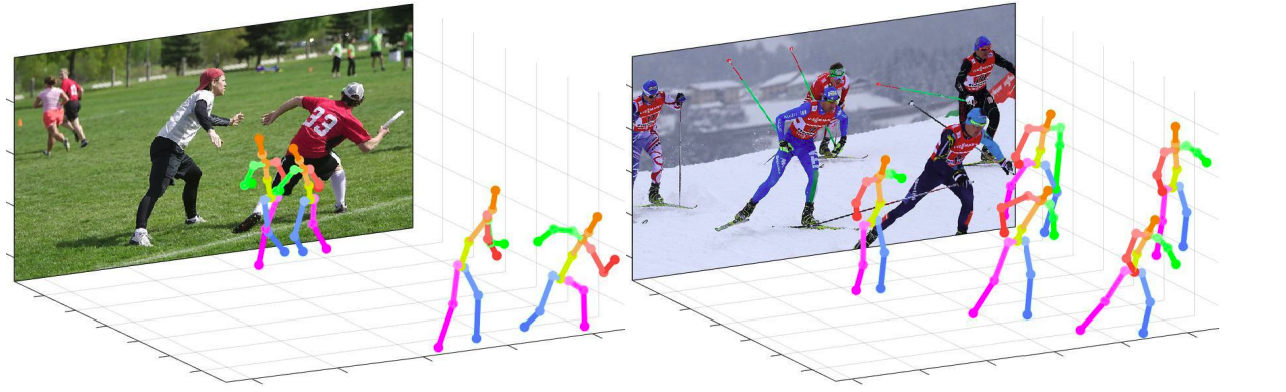
카메라 거리를 아는 상태에서의 top-down방식을 통한 3D single RGB 이미지로 부터 3D "multi" person pose estimationpipeline moduleshuman detectionabsolute 3D human root localizat
2.[SIGGAPH_2020] Local motion Phases for Learning Multi-Contact Movements
consists of motion prediction network and gating network.gating networkcomputes a set of expert weightslearn how to dynamically combine expert weights
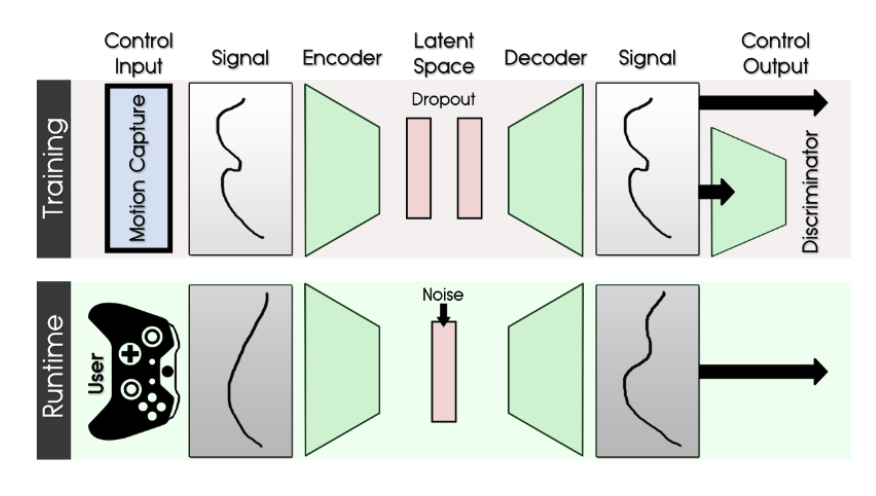
3.[SIGGAPH_2021] Neural animation Layerung for Synthesizing Martial Arts Movements

기존 연구의 아쉬운 점: \- control signal을 concatenate하는 end-to-end system의 특징은 모호함으로 입력신호의 내재적인 모호함으로 artifacts를 만드는 경우가 있다.움직임을 control하는 올바른 feature를 선택하는
4.[논문] BlazePose: On-device Real-time Body Pose tracking
https://arxiv.org/pdf/2006.10204.pdfheatmap과 regression을 이용한 33개의 keypoint를 찾는 on-device에 알맞은 빠르고 가벼운 Pose EstimationHeatmap방식:각 관절에 대한 히트맵을 만들어내
5.[논문] Adaptive Wing Loss for Robust Face Alignment via Heatmap Regression

heatmap(hm) regression에 대한 이상적인 loss 함수를 제안한다. Adaptive Wing Loss(AWL)는 gt hm의 다른 타입들을 그 모양에 맞게 잘 적응하도록 한다. 이 “적응성”은 background보다는 foreground pixel들에
6.[논문] RTMPose: Real-Time Multi-Person Pose Estimation based on MMPose
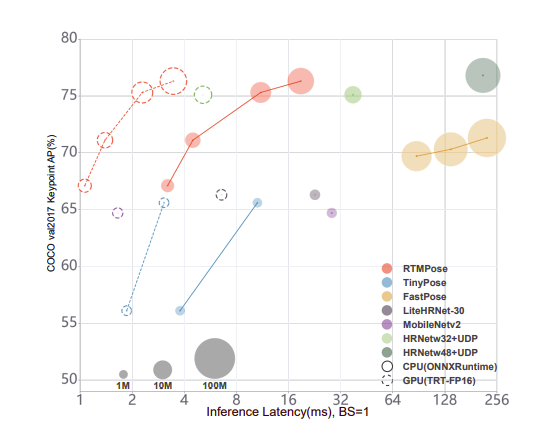
오늘 리뷰해본 논문은 RTMPose입니다. 이 논문을 통해서 SimCC를 알게 되었고, 처음에는 히트맵이 아닌 classification을 통해서 좌표를 예측한다는 아이디어에 놀랐습니다. 그래서 사실 이 이점만 가져가야지 했다가 정독해보고 더더더더더 놀랐습니다. 여기서
7.[논문] Scene-aware Egocentric 3D Human Pose Estimation
이번에 리뷰할 논문은 CVPR 2023에 등재된 논문인데요. 새로운 각도로 pose estimation을 수행합니다. 여기서 새로운 각도라는 것은 Egocentric으로, 우리가 흔히 보던 사진 속의 사람을 보는 것이 아닌, 추정하고자하는 객체의 머리 또는 특정 위치에
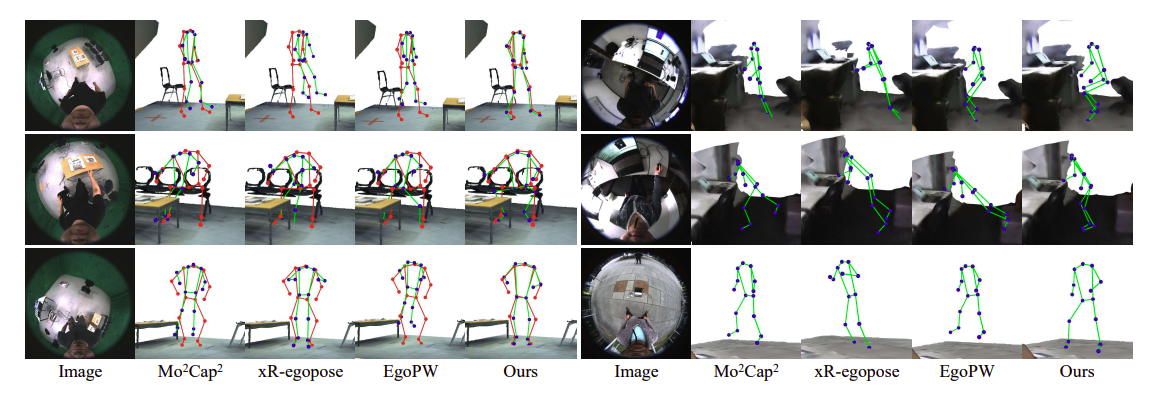
8.[논문] Mo2Cap2 : Real-time Mobile 3D Motion Capture with a Cap-mounted Fisheye Camera
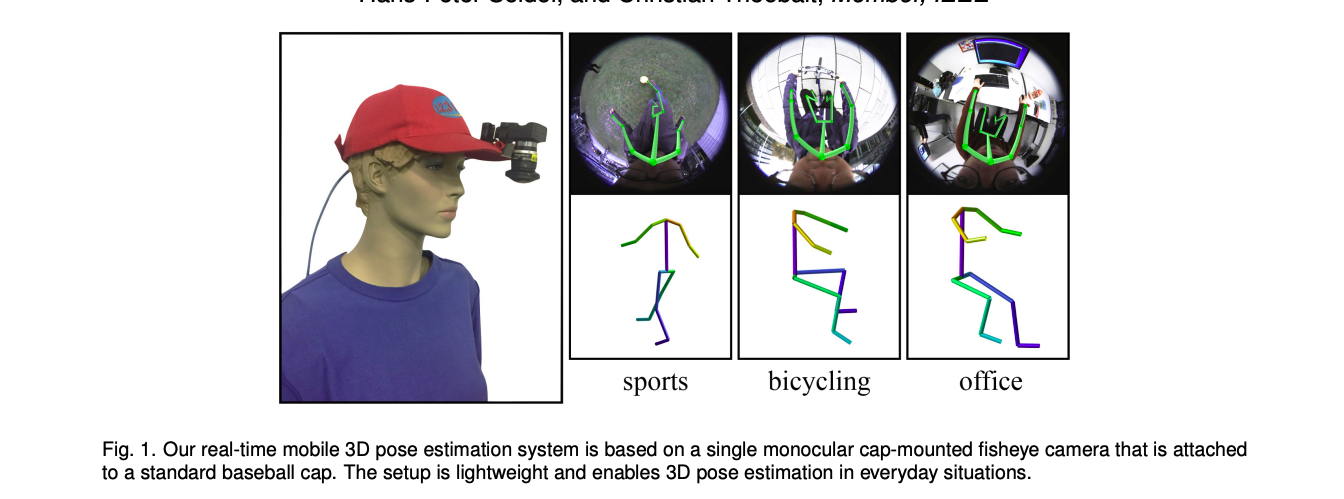
Egocentric pose estimation은 정말 미래지향적인 기술인데요. VR, AR과 같은 곳에 활용할 수 도 있을 것이라는 생각이 듭니다. 최근 많은 기업들이 그 분야에 많은 투자를 하고 있구요. 정확도만 올리고 확장된 기술 개발만 있으면 안성맞춤이지 않을까
9.[논문] xR-EgoPose: Egocentric 3D Human Pose from an HMD Camera
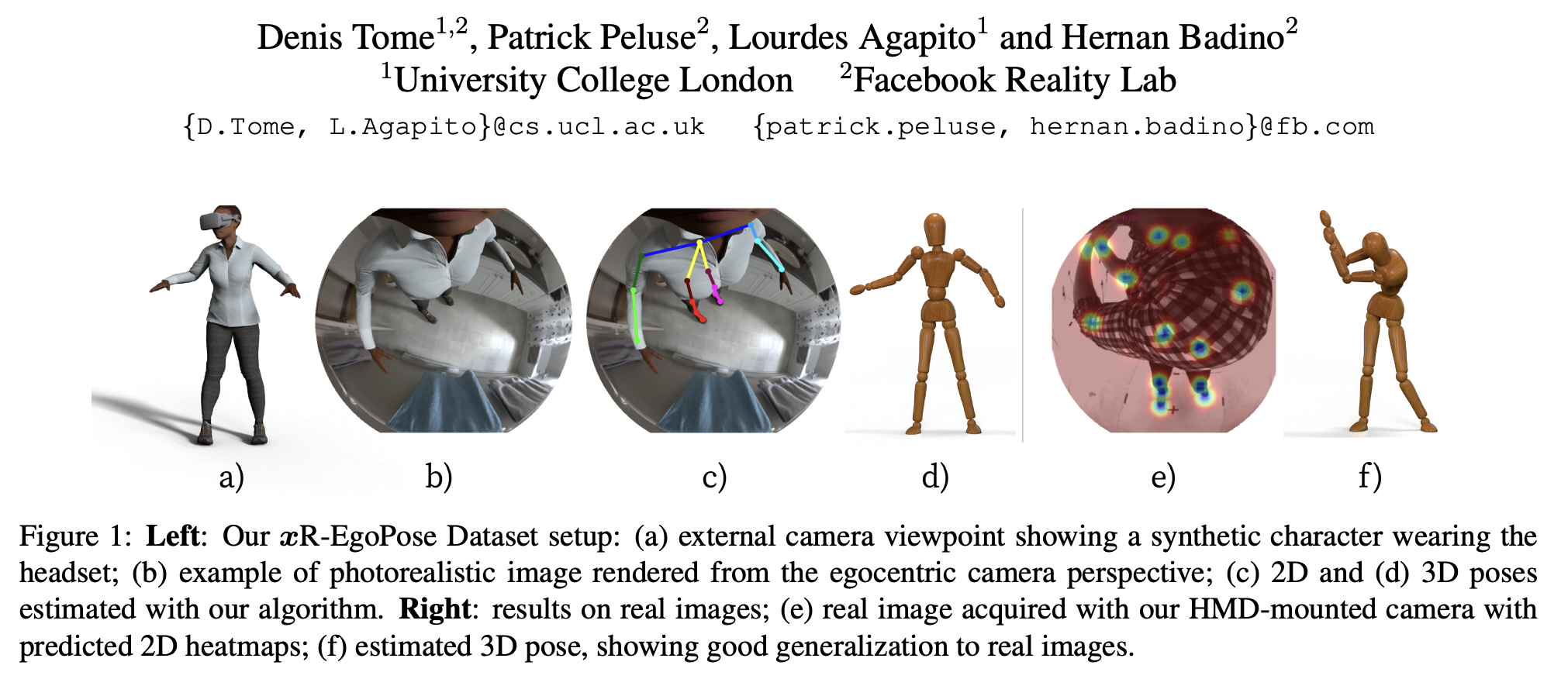
(참고로, SelfPose: 3D Egocentric Pose Estimation from a Headset Mounted Camera. 와 같은 논문입니다.)
10.[논문] Effective Whole-body Pose Estimation with Two-stages Distillation, DWPose
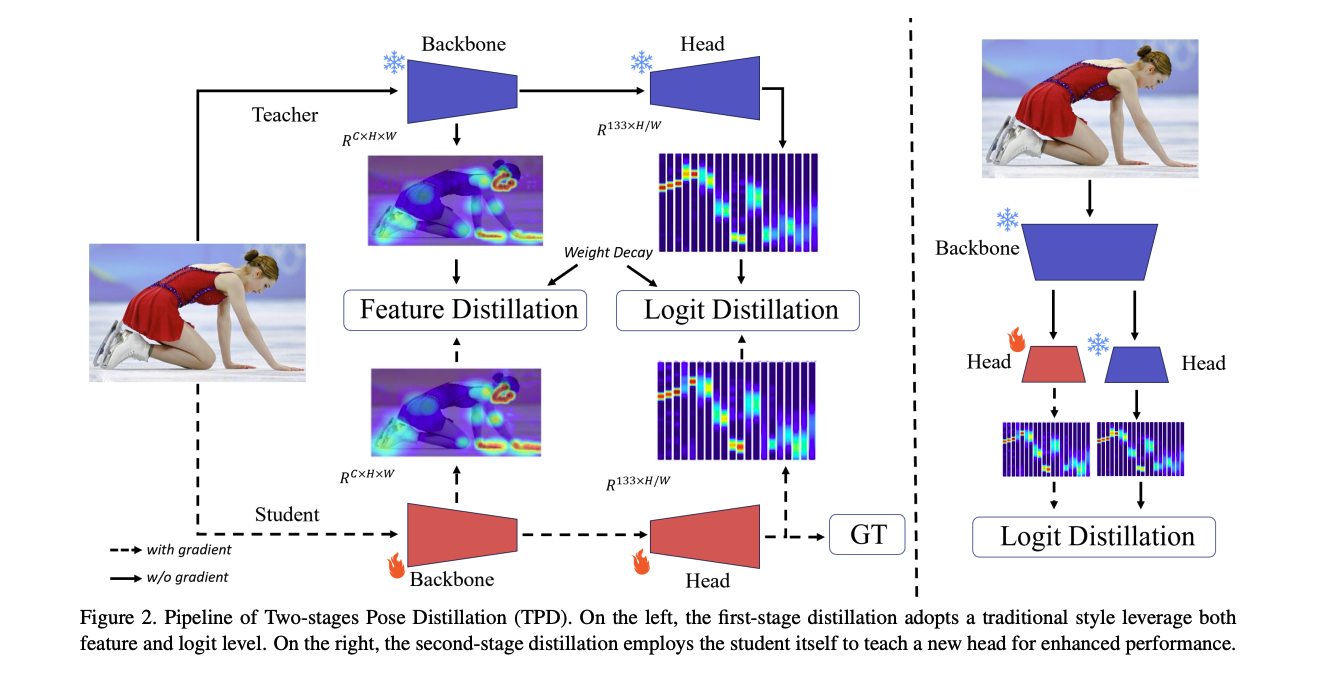
오늘 리뷰할 논문은 ICCV 2023에 제출된 논문 Effective Whole-body Pose Estimation with Two-stages Distillation입니다. 얼마 전에 RTMPose를 보고 놀랐는데, 이 논문은 그런 RTMPose를 기반으로 두가지
11.[논문] MeTRAbs: Metric-Scale Truncation-Robust Heatmaps for Absolute 3D Human Pose Estimation
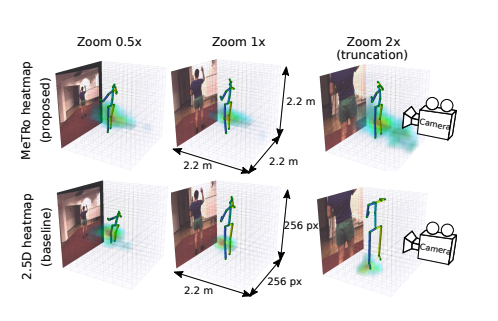
이번 논문은 독일에서 나온 MeTRAbs: Metric-Scale Truncation-Robust Heatmaps for Absolute 3D Human Pose Estimation 입니다. 저는 이 분의 논문을 접하기 이전에 demo를 보고서, 너무 정확해서 한번 놀
12.MeTRAbs Preprocess / Postprocess (전/후처리)
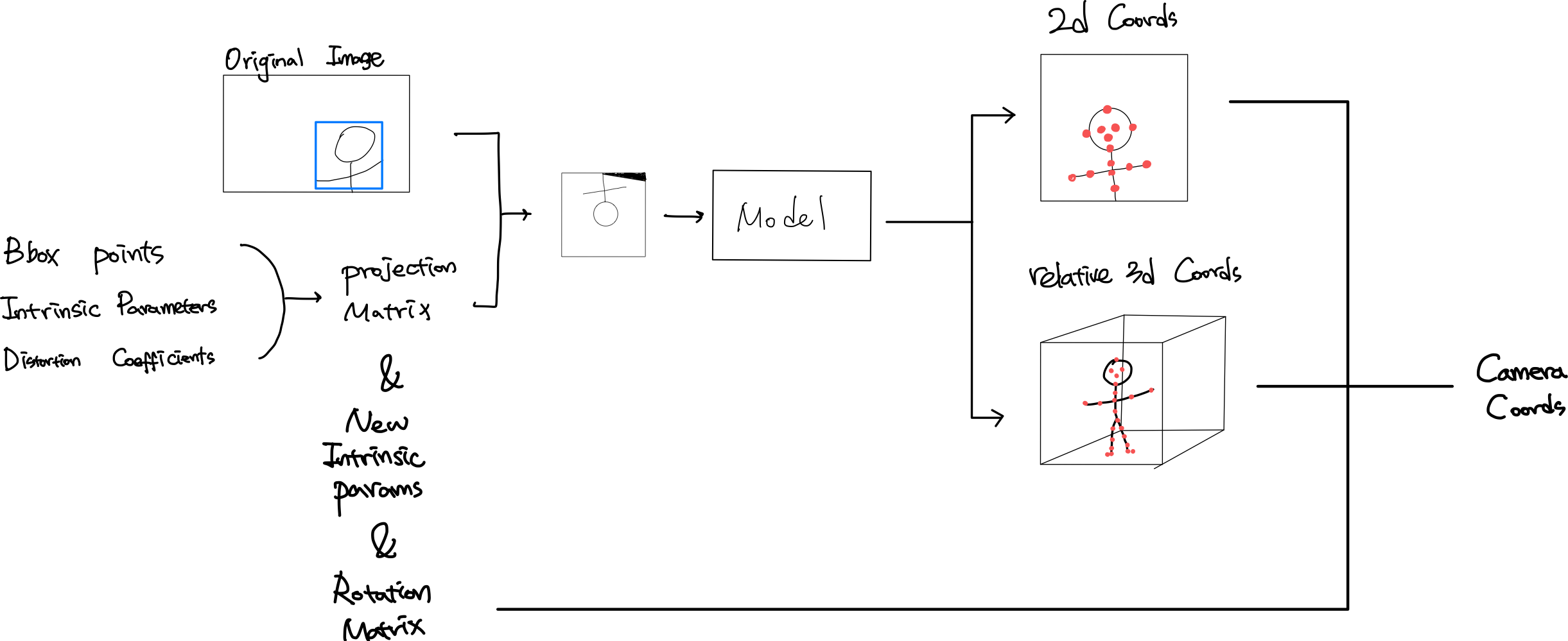
Pose Estimation 분야에는 최근 다양한 output 형태로 연구가 진행되고 있습니다. 여기서 말하는 output은 2D joint, 3D joint, mesh 등을 의미합니다. 아직까지 mesh형태를 출력하는 실시간 모델은 찾아보기 힘들고, 2D는 정확도도