github : https://github.com/ros-drivers/usb_cam
~/catkin/src/ 에 git clone
usb_cam 연결 port 확인
1. directory로 확인하기
$ ls -ltr /dev/video*
2. v4l-utils로 확인하기
$ sudo apt-get install v4l-utils
$ v4l2-ctl --list-devices
launch file, node file 수정
cam 세부 정보 확인 (pixel format, resolution)
$ v4l2-ctl --list-formats-ext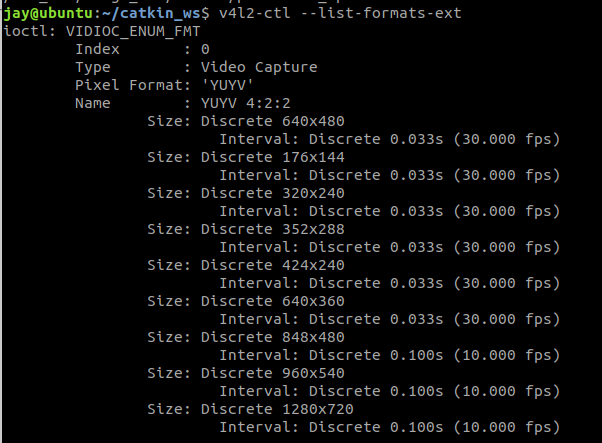
특정 디바이스 정보 확인
$ v4l2-ctl -d /dev/video1 --list-formats/launch/usb_cam-test.launch
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>/nodes/usb_cam_node.cpp
auto focus 해제
// advertise the main image topic
image_transport::ImageTransport it(node_);
image_pub_ = it.advertiseCamera("image_raw", 1);
// grab the parameters
node_.param("video_device", video_device_name_, std::string("/dev/video0"));
node_.param("brightness", brightness_, -1); //0-255, -1 "leave alone"
node_.param("contrast", contrast_, -1); //0-255, -1 "leave alone"
node_.param("saturation", saturation_, -1); //0-255, -1 "leave alone"
node_.param("sharpness", sharpness_, -1); //0-255, -1 "leave alone"
// possible values: mmap, read, userptr
node_.param("io_method", io_method_name_, std::string("mmap"));
node_.param("image_width", image_width_, 640);
node_.param("image_height", image_height_, 480);
node_.param("framerate", framerate_, 30);
// possible values: yuyv, uyvy, mjpeg, yuvmono10, rgb24
node_.param("pixel_format", pixel_format_name_, std::string("yuyv"));
// enable/disable autofocus
node_.param("autofocus", autofocus_, false);
node_.param("focus", focus_, -1); //0-255, -1 "leave alone"
// enable/disable autoexposure
node_.param("autoexposure", autoexposure_, true);
node_.param("exposure", exposure_, 100);
node_.param("gain", gain_, -1); //0-100?, -1 "leave alone"
// enable/disable auto white balance temperature
node_.param("auto_white_balance", auto_white_balance_, true);
node_.param("white_balance", white_balance_, 4000);수정 후
cd ~/catkin_ws
catkin_make
source devel/setup.bash 창 띄우기 관련 package
$ sudo apt-get install ros-melodic-image-view실행 하기
roslaunch usb_cam usb_cam-test.launchtopic
/usb_cam/camera_info
/usb_cam/img_raw
수정 중...
roslaunch usb_cam
Autonomous driving vision