
결과물. 저번 글과 크게 달라진 것은 없다.
대각선으로 가로질러 갈수 있게 하되,
가로지르는 경로에 장애물이 존재할 경우 이동하지 못하도록 했다.
아직 실제로 이동을 구현해보지는 않았지만 타일맵이기 때문에
장애물을 가로지르는 경로는 이상해 보일 것 같았다.
(충돌 문제도 있고..)
🔽 작성한 코드
public class Node : IComparable<Node>
{
public int x, y;
public int G, H;
public int F => G + H;
public Node parent;
public bool isObstacle;
public Node(bool _isObstacle, int _x, int _y) { isObstacle = _isObstacle; x = _x; y = _y; }
public int CompareTo(Node other)
{
if (F == other.F)
return H.CompareTo(other.H);
return F.CompareTo(other.F);
}
}
...
private void PathFinding()
{
List<(int, int)> dir = new List<(int, int)> { (0, -1), (0, 1), (1, 0), (-1, 0),
(1, 1), (-1, 1), (-1, -1), (1, -1)};
Node currNode;
Node startNode = mapData[startPos.x - bottomLeft.x, startPos.y - bottomLeft.y];
Node endNode = mapData[endPos.x - bottomLeft.x, endPos.y - bottomLeft.y];
List<Node> waitingNodes = new List<Node>() { startNode };
HashSet<Node> visitedNodes = new HashSet<Node>();
while (waitingNodes.Count > 0)
{
waitingNodes.Sort();
currNode = waitingNodes.First();
waitingNodes.Remove(currNode);
visitedNodes.Add(currNode);
if (currNode == endNode)
{
// *** Gizmo 그리기 용 리스트 저장
// Node node = endNode;
// while (node != startNode)
// {
// finalPaths.Add(node);
// node = node.parent;
// }
// finalPaths.Add(startNode);
// finalPaths.Reverse();
return;
}
for (int i = 0; i < dir.Count; ++i)
{
int nextX = currNode.x + dir[i].Item1;
int nextY = currNode.y + dir[i].Item2;
if (nextX < bottomLeft.x || nextX > topRight.x || nextY > topRight.y || nextY < bottomLeft.y) continue;
[⭐]if (mapData[currNode.x - bottomLeft.x, nextY - bottomLeft.y].isObstacle
|| mapData[nextX - bottomLeft.x, currNode.y - bottomLeft.y].isObstacle) continue;
if (mapData[nextX - bottomLeft.x, nextY - bottomLeft.y].isObstacle) continue;
if (visitedNodes.Contains(mapData[nextX - bottomLeft.x, nextY - bottomLeft.y])) continue;
Node nextNode = mapData[nextX - bottomLeft.x, nextY - bottomLeft.y];
int cost = (currNode.x - nextX == 0 || currNode.y - nextY == 0) ? 10 : 14;
int moveCost = currNode.G + cost;
if (moveCost < nextNode.G || waitingNodes.Contains(nextNode) == false)
{
nextNode.G = moveCost;
nextNode.H = (Mathf.Abs(nextNode.x - endNode.x) + Mathf.Abs(nextNode.y - endNode.y)) * 10;
nextNode.parent = currNode;
waitingNodes.Add(nextNode);
}
}
}
}고라니님의 코드와 크게 다른것은 없고, 자료형이나 정렬 방식만 조금 수정했다.
⭐ 부분이 장애물 여부를 검사하는 부분이다.
🔽 여러 테스트 사진

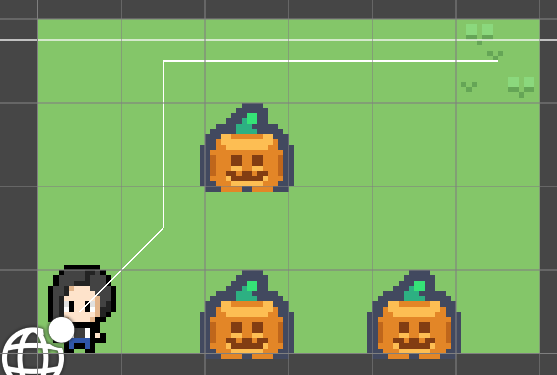
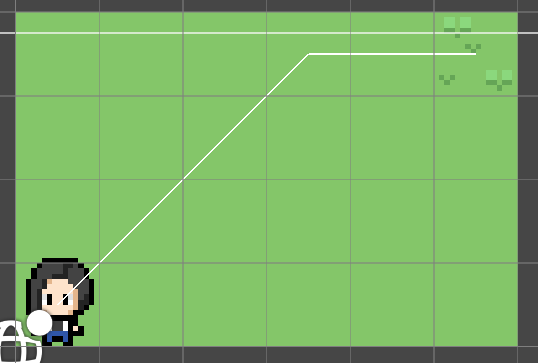


당연하겠지만 못가는 경우는 그려지지 않는다.
📝 다음에 할 일
대각선 이동 구현- 실제 캐릭터 이동
- 맵 정보 저장 개선
