추론시에 label 텍스트와 pt파일이 있어야됨
SSD training
트레이니과 서버는 분리 되어야 함
장비에서는 트레이닝x -> 연습은 코랩에서 하는게 좋음...
onnx(온앤엑스)
네트워크 추론을 위한 공통 파일포맷
google drive mount
from google.colab import drive
drive.mount('/content/gdrive')
cd gdrive/MyDrive/ssd/
model to onnx
fruit model
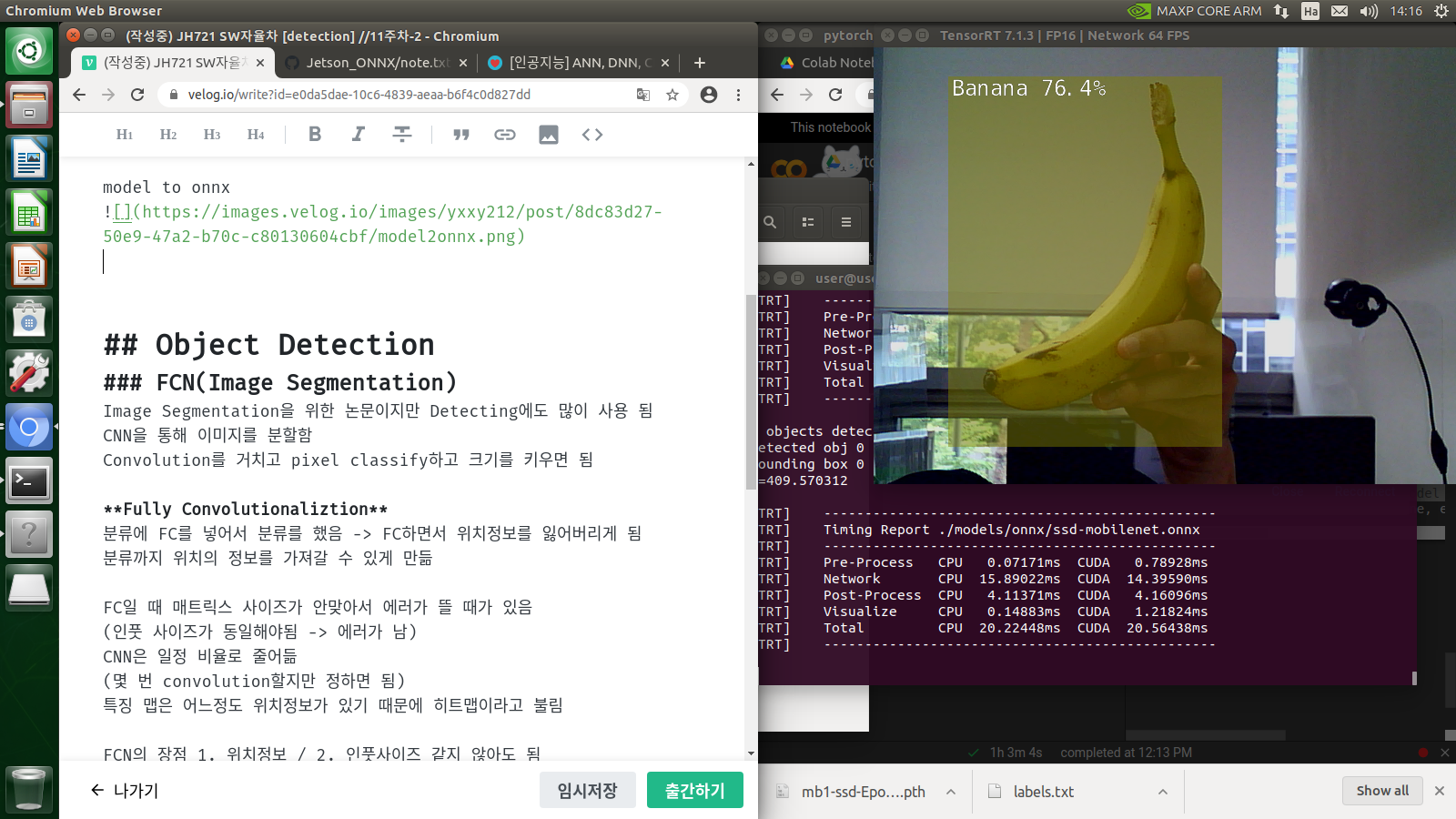
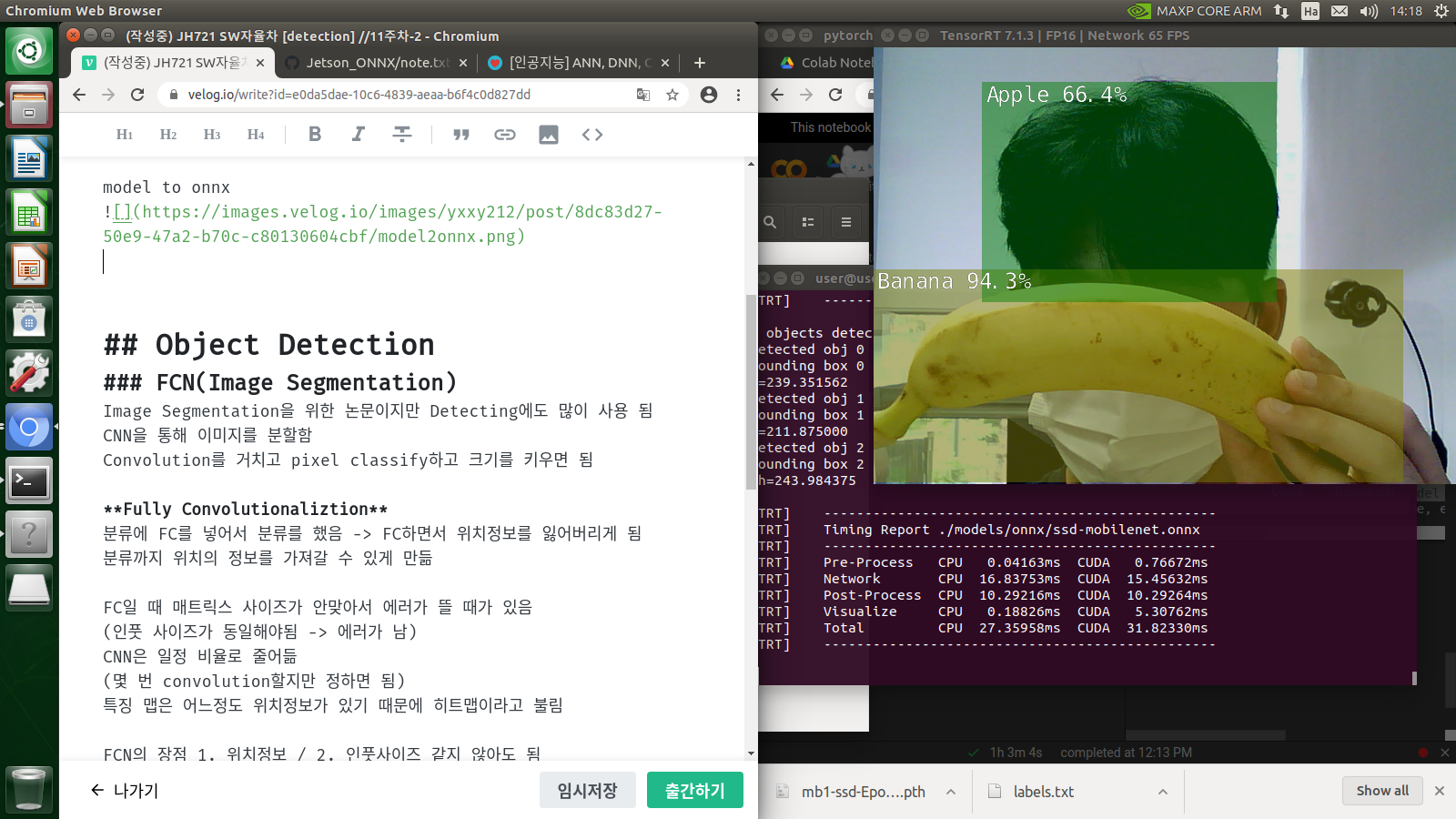
과일만 모델링 했기 때문에 머리를 사과로 잡았다.
Object Detection
FCN(Image Segmentation)
Image Segmentation을 위한 논문이지만 Detecting에도 많이 사용 됨
CNN을 통해 이미지를 분할함
Convolution를 거치고 pixel classify하고 크기를 키우면 됨
Fully Convolutionaliztion
분류에 FC를 넣어서 분류를 했음 -> FC하면서 위치정보를 잃어버리게 됨
분류까지 위치의 정보를 가져갈 수 있게 만듦
FC일 때 매트릭스 사이즈가 안맞아서 에러가 뜰 때가 있음
(인풋 사이즈가 동일해야됨 -> 에러가 남)
CNN은 일정 비율로 줄어듦
(몇 번 convolution할지만 정하면 됨)
특징 맵은 어느정도 위치정보가 있기 때문에 히트맵이라고 불림
FCN의 장점 1. 위치정보 / 2. 인풋사이즈 같지 않아도 됨
Deconvolution
convolution하면서 사이즈가 줄어듦 -> 사이즈를 키우는 것(deconvolution)(책 p.67 참조)
원래 사이즈로 늘려주자
Skip Architecture
deconvolution 할때 마다 이전 feature맵 정보를 더해줌
중간 feature 맵에도 유용하게 사용할 수 있다는 것을 알게됨
Detection
바운딩 박스가 나오는 것이 목표
정확한 좌표가 나오는 것
(고양이다 하는 것은 세그멘테이션 /디텍션은 타겟마다 4개의 좌표 값이 나와야 됨)
하나의 인풋을 하고 classification과 regression을 사용해야됨
그 loss 값을 한번에 구함
-> 문제는 고양이와 강아지가 몇마리가 있냐? 라는 문제!!
디텍션의 발전(p. 71 참조)
초창기 슬라이딩 윈도우나 hoog를 이용해서 셀렉티브 서치를 하는 기법 사용
Faster R-CNN
region proposal network : 여기에 물체가 있는 것 같아
classifier : 없으면 버리고 있으면 분류함
proposal은 anchor box를 기준으로 함
