[Review and Implementation]LSTM-based Encoder-Decoder for Multi-sensor Anomaly Detection
0
paper review&implementation
목록 보기
1/7
들어가기 전
최근 회사에서 multi sensor를 활용한 이상치 탐지를 해야하는 업무가 있었다.
기존의 있던 rule base의 알고리즘이 사용자가 많아지면서 그 한계를 보인것 같다.
급한데로 rule base의 알고리즘을 조금 수정해서 문제를 어느정도 해결할 수 있을 것으로 보이지만 근본적으로 완벽한 해결책은 아니었다.
때문에 장기적인 관점에서 딥러닝을 활용해서 문제를 해결할 수 있지 않을까하는 생각에 여러 모델을 실험하고 있다.
이번에 만들어본 LSTM 기반 Auto Encoder 모델은 이 task에 처음 시도해본 모델이다.
결론부터 말하자면 우리 task에는 기대만큼 성능이 좋지 못했다.
그 이유가 parameter 문제인지 아니면 preprocessing의 문제인지는 좀 더 조사해봐야 알 수 있겠다.
Paper Review
paper link : LSTM-based Encoder-Decoder for Multi-sensor Anomaly Detection
모델 설명
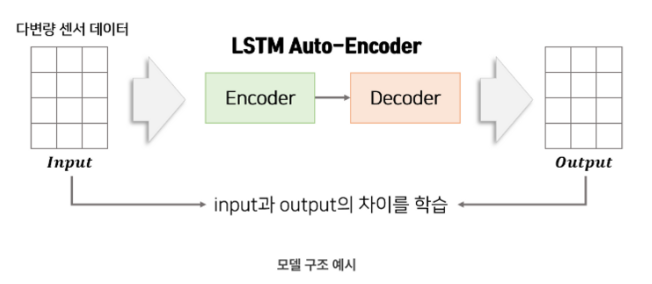
- 정상 데이터를 input으로 입력하여 encoder에서 차원 축소, decoder에서 다시 복원 하는 과정을 거쳐 output이 나온다.
- 인풋과 아웃풋의 차이를 최소화 하도록 학습한다.(MSE 사용)
학습 과정
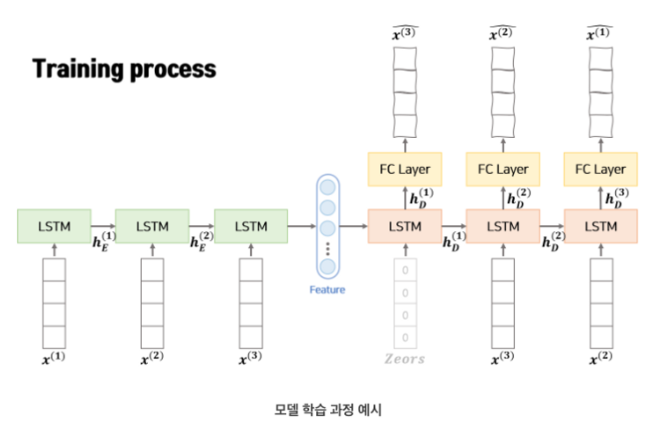
- Teacher Forcing 기법 사용
- initial 값은 0 벡터를 넣음
- 형태의 시퀀스가 인풋으로 들어간다. 즉, window size = L로 정해진다.
- 각각의 시점의 x 벡터 역시 으로 m 차원 벡터로 이루어져 있다.
- encoder에서 학습된 를(한 번에 들어가는 window size가 L 이므로 마지막에 전달되는 hidden layer의 번호는 L 번이다.) Decoder에 전달해준다.
- 아웃풋은 형태의 역순으로 나온다.
- Decoder에서 을 예측할때 위와 같은 fc layer를 거친다.
Loss Function
- S, N은 normal 데이터 셋 (데이터 셋에 대한 설명은 밑에서 보다 자세하게 설명)
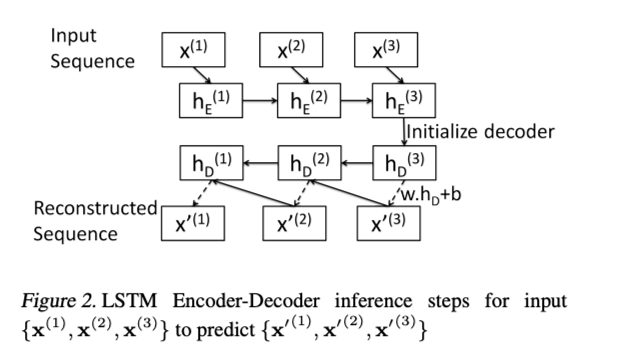
추론 과정
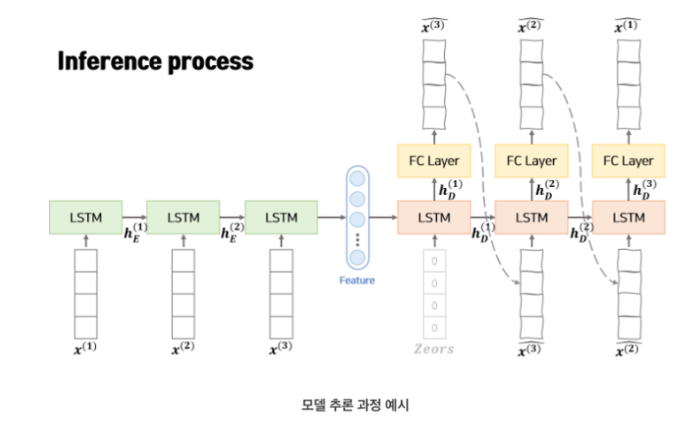
- 추론 과정에서는 teacher forcing 없이 이전 스텝의 데이터를 사용합니다.
Computing likelihood of anomaly
-
Data
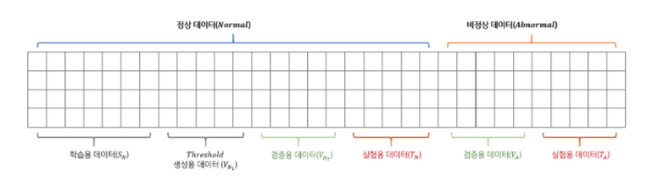
- 은 정상 데이터, 는 비정상 데이터로 분류
- 는 학습에 사용
- 는 후술할 를 구하기 위한 데이터
-
Reconstruction Error
: i 지점의 Reconstruction Error
- 데이터 셋을 활용해 를 구한다.
-
Anomaly Score
-
와 구하기
- 데이터 셋트 을 사용하여 와 를 구한다.
- 의 평균을 MLE를 통해서 구하고 구한 평균으로 를 구한다.
-
구하기
- 이면 지점 를 이상치라고 정의함.
-
Score
- score는 이면 이, 이면 에 더 가중치를 두는 방식이다.
코드 구현
Dataset
class AD_Dataset(Dataset):
def __init__(self, timestamp, data, args, normal_mean=None, normal_std=None):
# self.idx = idx
self.timestamp = timestamp
self.data = data
self.input_size = args.input_size
self.normal_mean = normal_mean
self.normal_std = normal_std
self.window_size = args.window_size
# 정규화
self.data = (self.data - self.normal_mean) / self.normal_std
print('정규화 완료')
time_change = np.where(timestamp[:-1]-timestamp[1:]> 60)[0]+1
self.input_idx = np.array([i for i in range(len(self.data)//self.window_size*self.window_size)]).reshape(-1,self.window_size)
self.input_idx = np.delete(self.input_idx, time_change//self.window_size, axis=0)
self.var_data = torch.tensor(self.data, dtype=torch.float)
def __len__(self):
return len(self.input_idx)
def __getitem__(self, item):
temp_input_idx = self.input_idx[item]
input_values = self.var_data[temp_input_idx]
return input_valuesModel
class Encoder(nn.Module):
def __init__(self, args):
super(Encoder, self).__init__()
self.hidden_size = args.hidden_size
self.num_layers = args.num_layers
self.droupout = args.dropout
self.lstm = nn.LSTM(args.input_size, args.hidden_size, arg.snum_layers, batch_first=True,
dropout=args.dropout, bidirectional=False)
def forward(self, x):
_, (hidden, cell) = self.lstm(x) # out: tensor of shape (batch_size, seq_length, hidden_size)
return (hidden, cell)
class Decoder(nn.Module):
def __init__(self, args):
super(Decoder, self).__init__()
self.hidden_size = args.hidden_size
self.output_size = args.output_size
self.num_layers = args.num_layers
self.droupout = args.dropout
self.lstm = nn.LSTM(args.input_size, args.hidden_size, args.num_layers, batch_first=True,
dropout=args.dropout, bidirectional=False)
self.fc = nn.Linear(args.hidden_size, args.output_size)
self.relu = nn.ReLU()
def forward(self, x, hidden):
outputs, (hidden, cell) = self.lstm(x, hidden)
pred = self.fc(outputs)
# pred = self.relu(pred)
return pred, (hidden, cell)
class LSTMAutoEncoder(nn.Module):
def __init__(self,args)->None:
super(LSTMAutoEncoder, self).__init__()
self.encoder = Encoder(args)
self.reconstruct_decoder = Decoder(args)
def forward(self, input:torch.Tensor) -> torch.Tensor:
batch_size, sequence_length, var_length = input.size()
encoder_hidden = self.encoder(input)
inv_idx = torch.arange(sequence_length - 1, -1, -1).long()
reconstruct_output = []
temp_input = torch.zeros((batch_size, 1, var_length), dtype=torch.float)
hidden = encoder_hidden
for _ in range(sequence_length):
temp_input, hidden = self.reconstruct_decoder(temp_input, hidden)
reconstruct_output.append(temp_input)
reconstruct_output = torch.cat(reconstruct_output, dim=1)[:,inv_idx,:]
return reconstruct_outputTrain
def trainer(args, model, train_loader, valid_loader):
optimizer = torch.optim.Adam(model.parameters(), lr=args.lr) # adam
loss_fn = torch.nn.MSELoss() # MSE
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.5, patience=5, verbose=True) # ReduceLROnPlateau : loss 변화량에 기반해 lr 조절
epochs = tqdm(range(1, args.epochs+1))
## 학습하기
best_loss = np.inf
# loss 값 저장
train_loss_arr = []
valid_loss_arr = []
for epoch in epochs:
model.train()
optimizer.zero_grad()
train_iterators = enumerate(train_loader)
loss_arr = []
for i, batch_data in train_iterators:
batch_data = batch_data.to(args.device)
predict_values = model(batch_data)
loss = loss_fn(predict_values, batch_data)
loss.backward()
optimizer.step()
optimizer.zero_grad()
loss_arr.append(loss.item())
model.eval()
eval_loss = 0
valid_iterators = enumerate(valid_loader)
with torch.no_grad():
for i, batch_data in valid_iterators:
batch_data = batch_data.to(args.device)
predict_values = model(batch_data)
loss = loss_fn(predict_values, batch_data)
eval_loss += loss.mean().item()
eval_loss /= len(valid_loader)
if eval_loss < best_loss:
best_loss = eval_loss
best_model = model
print('save model')
else:
if args.early_stop:
print("Early Stopping")
break
scheduler.step(eval_loss)
train_loss_arr.append(np.mean(loss_arr))
valid_loss_arr.append(eval_loss)
print(f"epoch : {epoch}, train_loss : {np.mean(loss_arr)}, valid_loss : {eval_loss}")
return best_model, train_loss_arr, valid_loss_arrAnomaly Score
def get_reconstrcution_error(args, model, test_loader):
loss = nn.L1Loss(reduce=False)
test_iterator = enumerate(test_loader)
reconstrcution_error = []
with torch.no_grad():
for i, batch_data in tqdm(test_iterator):
batch_data = batch_data.to(args.device)
predict_values = model(batch_data)
# MAE loss
loss_value = loss(predict_values, batch_data)
reconstrcution_error.append(loss_value.mean(dim=0).cpu().numpy())
reconstrcution_error = np.concatenate(reconstrcution_error, axis=0)
return reconstrcution_error
class Anomaly_Calculator:
def __init__(self, mean:np.array, std:np.array):
assert mean.shape[0] == std.shape[0] and mean.shape[0] == std.shape[1] # 평균과 분산의 차원이 같아야함
self.mean = mean
self.std = std
def __call__(self, reconstruction_error:np.array):
x = reconstruction_error - self.mean
return np.matmul(np.matmul(x, self.std), x.T)Score
# precision, recall 구하기
def get_evaluation(label:np.array, anomaly_score:list, threshold:float)->float:
'''
anomaly score로 abnormal
'''
anomaly_score = np.array(anomaly_score)
anomaly_score_length = anomaly_score.shape[0]
label = label[:anomaly_score_length]
pred = np.where(anomaly_score>threshold, 1, 0) # abnormal 예측값
precision = precision_score(label, pred)
recall = recall_score(label, pred)
return precision, recall
# f_score 구하기
def get_fscore(precision:list, recall:list, beta=0.05):
if (precision==0) & (recall==0):
return 0
f_score = (1+beta**2)*precision*(recall/((beta**2)*precision+recall))
return f_score참고 자료
머신러닝 엔지니어 김태종입니다. anomaly detection, recommendation system에 관심있습니다.