
모델 저장 및 불러오기
model.save()
-
학습의 결과를 저장하기 위한 함수
-
모델 형태(architecture)와 parameter를 저장
- 모델 parameter 저장
## 모델 저장(ordered dict 형태) MODEL_PATH ="saved" if not os.path.exists(MODEL_PATH): os.makedirs(MODEL_PATH) torch.save(model.state_dict(), os.path.join(MODEL_PATH, "model.pt")) # .pt확장자 ## 모델 로드 new_model = TheModelClass() # 동일한 모델일 때 # 모델 로드 new_model.load_state_dict(torch.load(os.path.join( MODEL_PATH, "model.pt")))- 모델 architecture 저장
# 모델 자체를 저장(모델의 architecture 저장) torch.save(model, os.path.join(MODEL_PATH, "model_pickle.pt")) # python pickle 확장자 model = torch.load(os.path.join(MODEL_PATH, "model_pickle.pt")) model.eval()
checkpoints
- 학습의 중간결과를 저장하여 최선의 결과를 선택
- epoch, loss, metric값을 지속적으로 확인 및 저장
## 데이터 저장
...(생략)...
for epoch in range(epochs):
...(생략)...
# 단계마다 저장(EPOCHS 단위)
torch.save({
'epoch': e,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': epoch_loss,
}, f"saved/checkpoint_model_{e}_{epoch_loss/len(dataloader)}_{epoch_acc/len(dataloader)}.pt")
print(f'Epoch {e+0:03}: | Loss: {epoch_loss/len(dataloader):.5f} | Acc: {epoch_acc/len(dataloader):.3f}')
## 데이터 로드
checkpoint = torch.load(PATH)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict']
epoch = checkpoint['epoch']
loss = checkpoint['loss']pretained model Transfer learning
- 다른 데이터셋으로 만든 모델을 현재 데이터에 적용하는 것(현재 DL에서 가장 일반적인 학습 기법임)
- backbone architecture가 잘 학습된 모델에서 일부분만 변경하여 학습을 수행함.
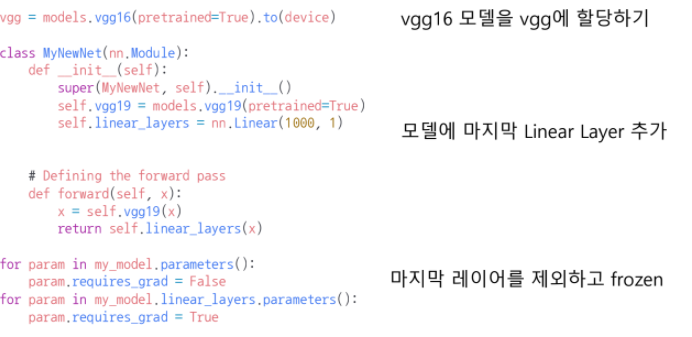
- pretained model을 활용시 모델의 일부분을 frozen시킴

AI Engineer : Lv 0