SLAM
1.SLAM applicaiton

SLAM 종류Lego-LOAMLIO-SAMLVI-SAMFAST-LIOFASTER-LIO각각의 SLAM 설치 방법SLAM applicaiton
2.LOAM

paper: LOAM: Lidar Odometry And Mapping in Real-time (or Low-drift and Real-time Lidar Odometry and Mapping)LOAM은 논문 제목대로 Lidar Odometry And Mapping의
3.LeGO-LOAM
LeGO-LOAM은 ground plane의 존재를 이용해 lightweight한 real time 6DOF pose estimation을 했다고 한다.noise filtering을 위해 segmentation을 해서 보다 robust한 결과를 얻었다고 했다.compu
4.SLAM with Autoware

SLAM이란 Simultaneous Localization And Mapping의 약자로, 자신의 위치를 파악함과 동시에 지도를 만드는 것이다. 크게 Mapping과 Matching 두 부분으로 나뉘게 된다.Mapping은 차량이 움직임과 동시에 차량에 부착된 광센서(
5.SLAM Using Integrating FAST-LIO and Scan Context(Ouster 64ch)
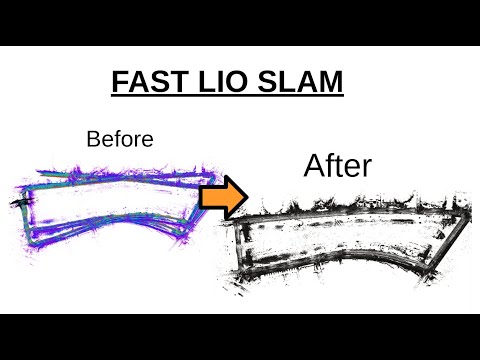
https://github.com/hku-mars/FAST_LIOhttps://github.com/gisbi-kim/SC-A-LOAMhttps://github.com/hku-mars/loam_livoxsrc 출처 : https://w
6.Lidar SLAM 맵 생성 및 병합(merge)하기 with SC-LIO-SAM, map merge tool
Map merge tool을 이용한다. > PC 환경 OS : Ubuntu 18.04 ROS version : ROS1 pytohn version : 3.7.0 1. SC-LIO-SAM란? 2. 다운로드 3. Build 및 실행 빌드 순서: 실행 순서: 4.
7.Point-lio 빌드 및 실행
Linux Condition PC : Desktop OS : Ubuntu 18.04 CPU : I9-10990 GPU : GTX 1660 TI CUDA : 11.7 ver. Memory : 32GB Editor : VS code Sensor LiDAR : Ouste
8.kiss_slam
설명 https://github.com/PRBonn/kiss-slam ✅실행 ⭕결과 1. raw data ply 파일 ⭕결과 이미지 1. raw data(top view) ![](https://velog.velcdn.com/images/qaszx1004/post