Linux Condition
PC : Desktop
OS : Ubuntu 18.04
CPU : I9-10990
GPU : GTX 1660 TI
CUDA : 11.7 ver.
Memory : 32GB
Editor : VS code
Sensor
LiDAR : Ouster2 64ch (Firmware=v2.1.1) (TCP)
GPS : Novatel PwrPak7-E1 Receiver (TCP) / GNSS Antenna 2 EA
IMU : Epson G320 MEMS (PwrPak7)
🔖참고 사이트)
- Ouster LiDAR ROS Driver Github
How to build-up Ouster LiDAR (velog) - Novatel GPS ROS Driver Github
How to build-up Novatel GPS (wiki) - Point-lio Github
❗전제 조건)
- LiDAR 센서에서 다음과 같은 LiDAR 토픽을 받을 수 있어야 함
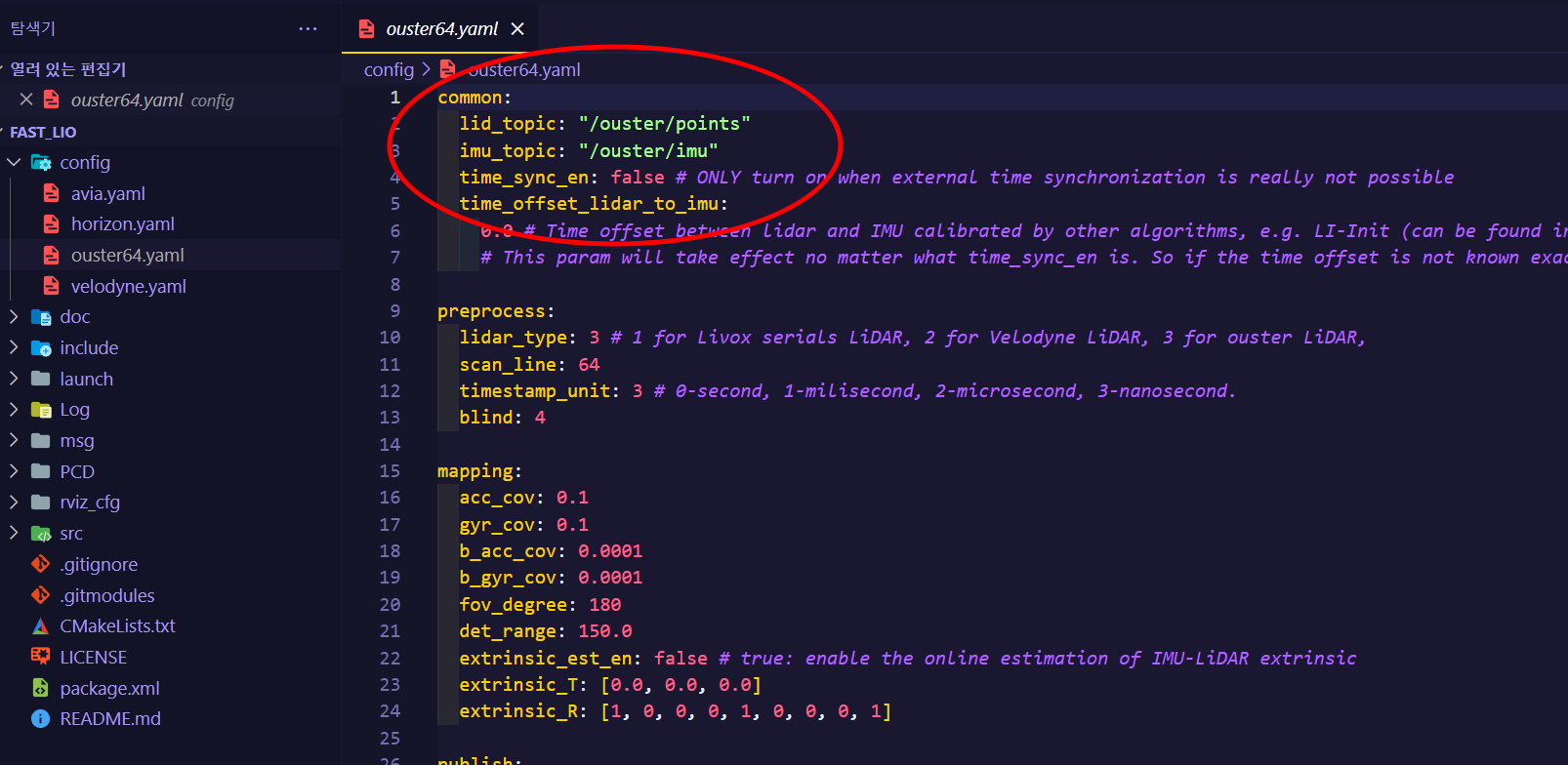
ouster/points
ouster/imu - GPS 센서에서 다음과 같은 GPS 토픽을 받을 수 있어야 함
Novatel/ - GPS가 VRS 연결이 되어 있어야 함
- ROS Melodic이 설치 되어 있고, ROS의 기본 지식이 있어야 함
1. 📄센서들의 데이터 수집
LiDAR, GPS, IMU 데이터를 .bag 파일로 저장한다.
2. ⛏ Point-lio 설치
Point-lio Github 사이트로 들어가 '3. Prerequisites' 부터 '4. Build' 까지 따라 진행한다.
3. 데이터 운용
3-1) 토픽 통일
토픽 명을 통일 시켜 주자.
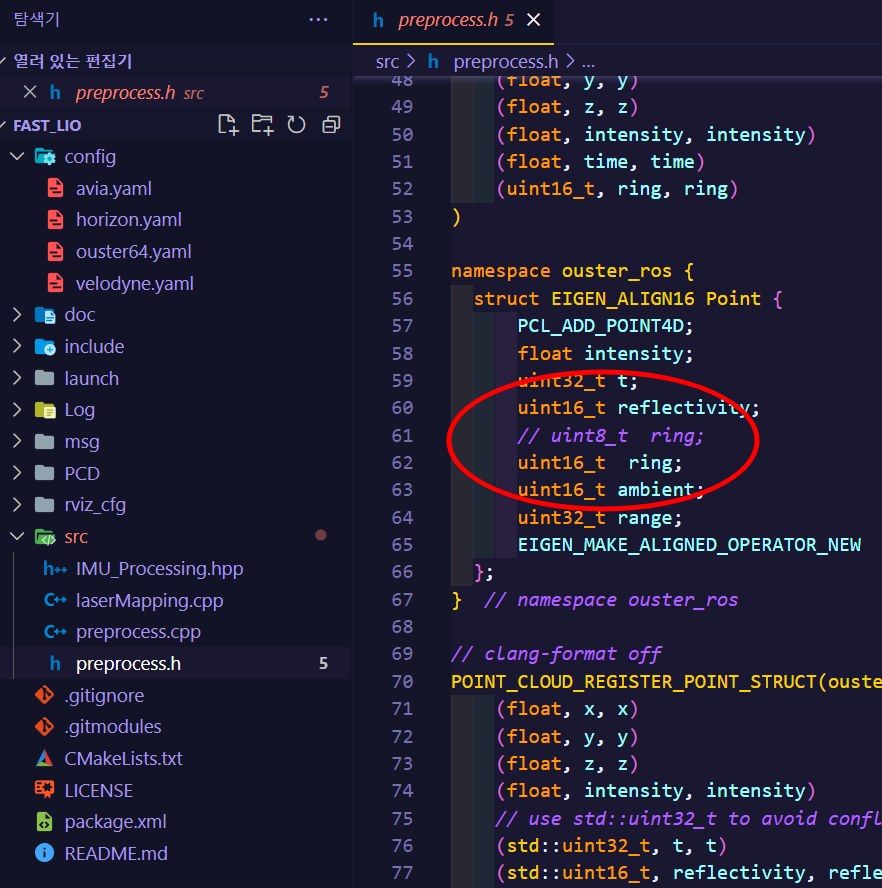
참고) ring data type of (OS1 vs OS2)
만약 OS2를 사용한다면, OS2의 데이터는 OS1의 ring 데이터와 타입이 다르다. OS1은 uint8인 반면, OS2는 uint16이다. 따라서 알고리즘에서 라이다 데이터를 받는 부분에 ring 데이터 타입을 uint를 16으로 바꿔주자. 이를 맞춰 주지 않으면, ring type error가 계속 나타날 것이다.

4. ⛏ Point-lio 실행
Point-lio 알고리즘을 실행하고 가지고 있는 bag 파일을 play한다.

자율주행에 관심이 있으며, Lidar SLAM을 공부하고 있습니다.