Value-based RL vs Policy-based RL
저번주까지 진행했던 DQN은 Value-based RL이라고 할 수 있다. 즉 action-value function에 초점을 두어 Qfunction을 구하고 이를 바탕으로 policy를 구하는 방식이다. DQN 또한 Q-function을 예측하고 policy를 만들어낸다.
Policy-based RL
policy 자체를 예측해서 function approximator에서 policy자체가 나온다.
기존 방법(value-based rl)에 비해서 수렴이 더 잘되며 가능한 action이 여러개 이거나 action 자체가 연속적인 경우에 효과적이다. 또한 하나의 optimal한 action으로 수렴하는것이 아니라 sthocastic한 policy를 배울 수 있다. (ex. 가위바위보)
기존 value-based RL은 value function을 바탕으로 policy를 계산하므로 value function이 약간만 달라져도 왼쪽으로 가야하는 policy가 오른쪽으로 가는 식으로 크게 변화할 수 있어 안정성이 떨어지고, 가위바위보 같은 상황 설정에서는 각각의 행동을 같은 확률로 행해야 할 수 있는데 하나의 optimal한 policy만을 도출할 수 밖에 없다는 문제가 있다.
Objective of policy-based RL
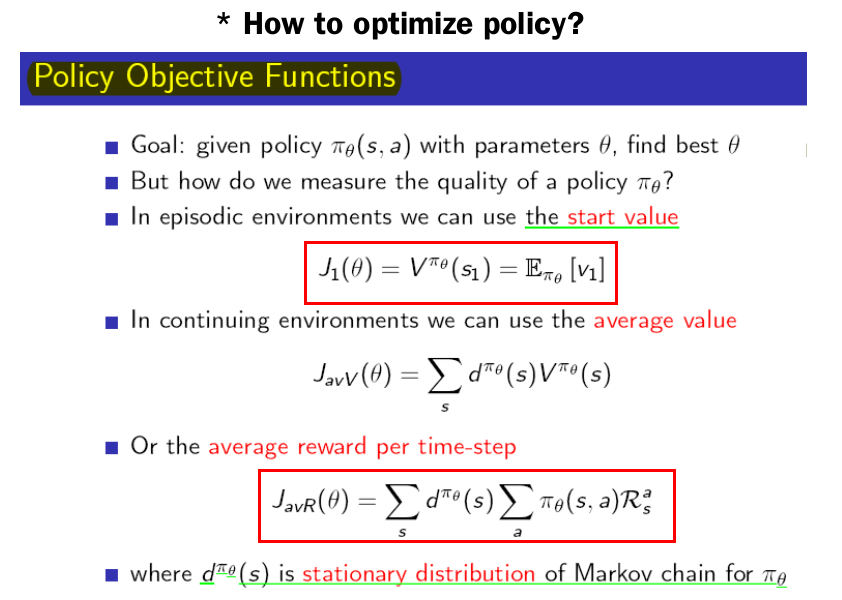
policy를 함수화 하여 최적의 파라미터를 구하기 위해서는 목적 함수의 존재가 필요하다.
이 그림의 세가지가 policy에 대한 목적 함수로 존재할 수 있고 그 중 1번째 혹은 3번째가 많이 사용된다.
간단하게 설명하자면

1번째는 첫번째 stated의 value function을 최대로 하고자 하는 것이 목표가 되고 3번째는 time-step마다 받은 reward들을 discount하지 않고 stationary distribution(해당 state에서 머무르게 될 확률의 분포)을 사용해서 계산하게 됩니다.
Policy gradient 계산 방법
- Finite Difference Policy gradient
각각의 parameter를 epsilon만큼 변화 시켜보고 각각의 parameter에 대한 Gradient를 구하는 것. policy자체가 미분 가능하지 않더라도 작동 가능하다는 장점이 있지만 parameter space가 커질수록 비효율적이고 노이지한 방법이다.
즉 각각의 parameter를 기존의 parameter보다 미세한 양을 랜덤하게 변화시킨 t개의 policy를 생성하고 각각에서 object function을 계산해서 average score를 계산해 update 한다.
- Monte-Carlo Policy Gradient : REINFORCE
policy는 미분 가능함을 가정하고 gradient를 취해주게 된다.
objective function에 직접 gradient를 취하게 되면 결국
Value-based RL vs Policy-based RL
저번주까지 진행했던 DQN은 Value-based RL이라고 할 수 있다. 즉 action-value function에 초점을 두어 Qfunction을 구하고 이를 바탕으로 policy를 구하는 방식이다. DQN 또한 Q-function을 예측하고 policy를 만들어낸다.
Policy-based RL
policy 자체를 예측해서 function approximator에서 policy자체가 나온다.
기존 방법(value-based rl)에 비해서 수렴이 더 잘되며 가능한 action이 여러개 이거나 action 자체가 연속적인 경우에 효과적이다. 또한 하나의 optimal한 action으로 수렴하는것이 아니라 sthocastic한 policy를 배울 수 있다. (ex. 가위바위보)
기존 value-based RL은 value function을 바탕으로 policy를 계산하므로 value function이 약간만 달라져도 왼쪽으로 가야하는 policy가 오른쪽으로 가는 식으로 크게 변화할 수 있어 안정성이 떨어지고, 가위바위보 같은 상황 설정에서는 각각의 행동을 같은 확률로 행해야 할 수 있는데 하나의 optimal한 policy만을 도출할 수 밖에 없다는 문제가 있다.
Objective of policy-based RL
policy를 함수화 하여 최적의 파라미터를 구하기 위해서는 목적 함수의 존재가 필요하다.
이 그림의 세가지가 policy에 대한 목적 함수로 존재할 수 있고 그 중 1번째 혹은 3번째가 많이 사용된다.
간단하게 설명하자면
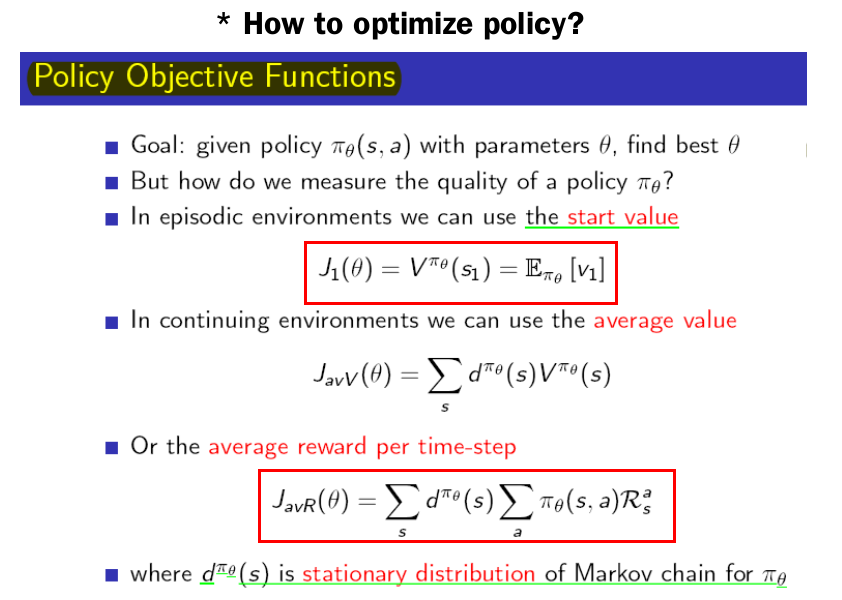
1번째는 첫번째 stated의 value function을 최대로 하고자 하는 것이 목표가 되고 3번째는 time-step마다 받은 reward들을 discount하지 않고 stationary distribution(해당 state에서 머무르게 될 확률의 분포)을 사용해서 계산하게 됩니다.
Policy gradient 계산 방법
- Finite Difference Policy gradient
각각의 parameter를 epsilon만큼 변화 시켜보고 각각의 parameter에 대한 Gradient를 구하는 것. policy자체가 미분 가능하지 않더라도 작동 가능하다는 장점이 있지만 parameter space가 커질수록 비효율적이고 노이지한 방법이다.
즉 각각의 parameter를 기존의 parameter보다 미세한 양을 랜덤하게 변화시킨 t개의 policy를 생성하고 각각에서 object function을 계산해서 average score를 계산해 update 한다.
- Monte-Carlo Policy Gradient : REINFORCE
policy는 미분 가능함을 가정하고 gradient를 취해주게 된다.
objective function에 직접 gradient를 취하게 되면 결국
이런 식이 나오게 된다.
이 식을 보면 스칼라인 reward를 곱해줌으로써 policy의 업데이트에 대한 정보를 주게 되는데 immediate reward만 사용하면 그 순간 순간에 대한 평가만이 반영되기 때문에 long-term reward인 action value function(q function)을 사용하겠다는 것인 policy gradient theorem이다.
→ stochastic policy 같은 경우 softmax로 표현하게 된다.
이전에는 모든 state에 대한 action value function을 알기 어려워서 approximation을 했었는데 policy자체를 update하려니 기준이 필요하고 이를 위해서 monte-carlo 방법을 사용하게 된다.
즉 episode를 한 번 가보고 reward들을 기억해 episode가 끝난 다음에 각 state에 대한 return을 계산하면 된다. 이를 REINFORCE알고리즘이라고 한다.
이런 식이 나오게 된다.
이 식을 보면 스칼라인 reward를 곱해줌으로써 policy의 업데이트에 대한 정보를 주게 되는데 immediate reward만 사용하면 그 순간 순간에 대한 평가만이 반영되기 때문에 long-term reward인 action value function(q function)을 사용하겠다는 것인 policy gradient theorem이다.
→ stochastic policy 같은 경우 softmax로 표현하게 된다.
이전에는 모든 state에 대한 action value function을 알기 어려워서 approximation을 했었는데 policy자체를 update하려니 기준이 필요하고 이를 위해서 monte-carlo 방법을 사용하게 된다.
즉 episode를 한 번 가보고 reward들을 기억해 episode가 끝난 다음에 각 state에 대한 return을 계산하면 된다. 이를 REINFORCE알고리즘이라고 한다.
