(작성중)[survey 논문 정리] Image-based 3D object Reconstruction: State-of-the-Art and Trends in the Deep Learning Era
논문 리뷰
목록 보기
2/3
Image-based 3D object Reconstruction: State-of-the-Art and Trends in the Deep Learning Era
2. Problem statement and Taxonomy
본 paper에서 사용되는 용어, 수식 정리
: 하나 또는 그 이상의 객체 X 의 RGB 이미지
: shape 을 추론하는 predictor
: reconstruction objective 를 최소화 하는 함수
: a set of parameter of
: target shape 와 reconstructed shape 의 차이를 측정하는 함수
: reconstruction objective == loss funtion in the deep learning literature
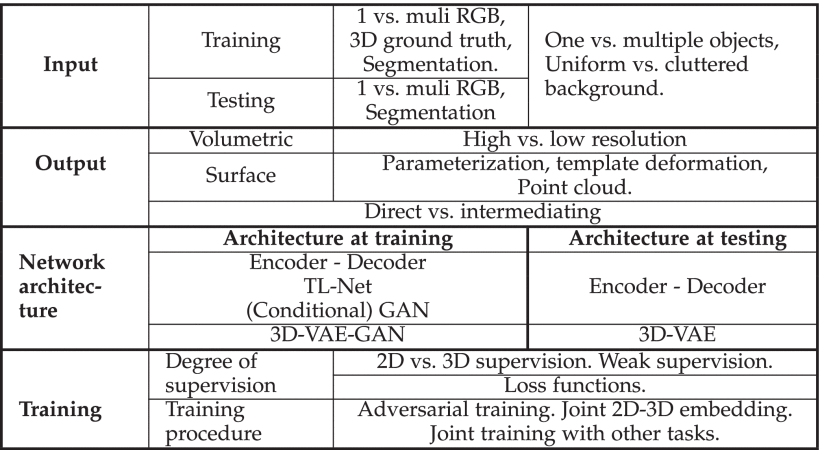
이 서베이는 최신 방법들을 아래 다섯 카테고리로 나누고 설명한다.
- the nature of input I (입력 I의 성질)
- the representation of the output (출력 표현)
- the deep learning network architecture used during training and testing to approximate the predictor f (학습과 평가에 사용하는 딥러닝 네트워크 구조)
- the training procedure (학습 과정)
- the degree of supervision
- 1. Input
- a single image
- multiple images
- captured using RGB cameras whose intrinsic and extrinsic parameters can be known or unknown
- a video stream
- i.e., a sequence of images with temporal correlation
-
2. Representation of the output
- 출력 표현은 네트워크 구조를 선택하는 데에 중요하다.
또한, 계산 효율성과 reconstruction quality에 영향을 미친다.- Volumetric representations
- 초기 딥러닝 기반 3D reconstruction 기술에 채택되어 널리 사용되었다.
- regular voxel grids를 사용하는 표현 방식이다.
- 이미지 분석에 사용되는 2D convolutions은 3D로 쉽게 확장될 수 있다.
- 하지만, memory 사용량이 많고, 적은 기술만이 sub-voxel accuracy를 달성했다.
- Surface-based representations
- meshes, point clouds 표현이 여기에 속한다.
- 이 표현 방식은 메모리 효율적이지만, 이러한 표현은 규칙적인 구조가 아니어서 딥러닝 구조에 잘 들어맞지 않는다.
- Intermediation
- 몇몇 3D reconstruction 알고리즘은 RGB이미지로부터 바로 물체의 3D geometry를 예측한다.
- 다른 몇몇은 순차적인 단계로 문제를 나누어 해결한다. 각 단계는 중간 표현을 예측한다.
- Volumetric representations
-
3. Network architecture
Predictor 를 구현하기 위해 다양한 network 구조가 사용되었다. Backbone 구조는 encoder 와 그 뒤를 따르는 decoder 로 구성된다.
