1. 논문 개요(Abstract)
- 제목: RAFT: Recurrent All-Pairs Field Transforms for Optical Flow (link)
- 저자: Zachary Teed(Princeton University) and Jia Deng(Princeton University, Princeton Vision & learning Lab - link)
- 발표지(학회): ECCV2020
- 발표일: 2020
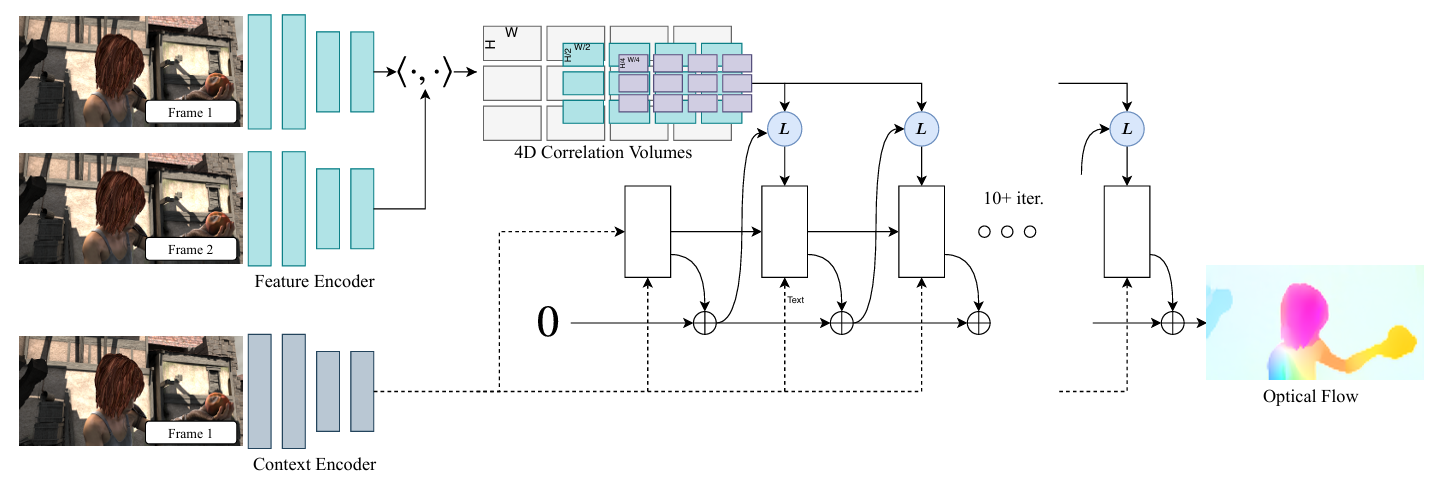
- 개요: 본 논문에서는 optical flow를 계산하기 위한 새로운 심층 신경망 구조인 All-Pairs Field Transforms(RAFT)를 제안한다. RAFT는 각 픽셀마다 feature를 추출하고, optical flow를 이루는 두 이미지간 픽셀 쌍에 대해서 multi-scale 4D corrlation volumes을 만든 후, recurrent unit을 통해 반복적으로 업데이트한다. KITTI 등 유명 공개 데이터셋에서 SOTA를 달성하였고, 모델의 일반화 성능이 좋아 합성데이터셋에서 학습된 모델이 KITTI 등 실세계 데이터에서도 높은 성능을 유지하였다. 또한 1088x436 사이즈 영상에서 Nvidia 1080ti GPU로 초당 10프레임의 처리 속도를 달성하였다.
그림 1. RAFT 파이프라인
2. 내용(Methods)
- Setup
- 연속된 두 RGB 이미지 를 입력받아 dense displacement field 를 계산하는 것이 목표
- Dense displacement field 는 상의 각 픽셀 를 와 같이 매핑함
- 전체 파이프라인은 <그림 1>과 같으며, feature extraction, computing visual similarity, iterative update와 같이 세 부분으로 나눌 수 있고, end-to-end 학습을 위해 모두 미분 가능한 형태로 이루어져 있음
- Feature Extraction
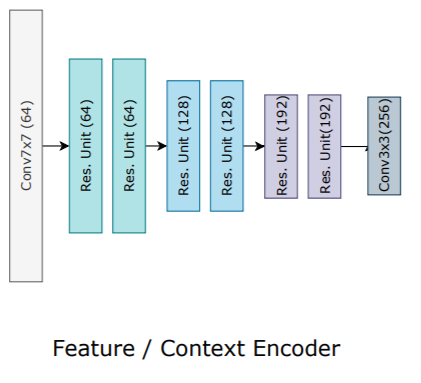
그림 2. Feature extraction network/context network 구조
-
두 입력 이미지의 특징을 추출하기 위해 일반적인 CNN 구조의 네트워크를 활용
-
Feature extraction network는 로 표기하며, 와 같이 1/8 해상도록 줄임(D=256)
-
Context network는 입력 영상의 context를 RAFT 뒷 단의 reccurent unit에 전달하기 위한 네트워크이며, feature extraction network와 같은 구조를 가지고 있음
- Computing Visual Similarity
그림 3. Correlation volume 구조

Correlation Volume
-
의 feature vector(를 통해 추출된 feature map 상의 cell)과 의 feature vector 사이의 조합 가능한 모든 feature vector 쌍에 대한 correlation을 4D 형태로 계산
-
입력 이미지에 대해서 , 라고 할 때, 다음과 같이 correlation volume을 계산(FlowNet에서 먼저 correlation volume 활용을 제안하였고, RAFT에서는 개념은 같지만 형태가 약간 변경된 형태를 사용)
-
즉, 위의 수식은 이미지 의 feature vector 와 이미지 의 feature vector 사이의 correlation은 라는 것을 의미하며, 한 번의 행렬곱(각 feature vector 간 내적)으로 계산되기 때문에 효율적
-
이후 correlation volume의 마지막 두 차원에 대해서 average pooling을 취하여 와 같이 4-layer pyramid를 구성함
-
각 level의 correlation volume 차원은 다음과 같음
-
이를 통해 크고 작은 여러 움직임에 대응하며, 특히 correlation volume의 앞쪽 두 차원은 유지함으로써 고해상도 정보 또한 유지하여 고속 이동하는 소형 물체에 대해서도 대응할 수 있도록 함
-
Correlation volume 계산 과정은 복잡도가 이지만, iteration 전에 단 한번 pre-compute되고, 구현이 쉬우며, 최종적으로는 전체 inference time 중 17%정도만 차지하기 때문에 bottleneck 되지는 않음
-
하지만, 저자들은 더욱 효율적인() 대체 방법을 제시하고 있으며, 혹시 correlation volume 계산이 bottleneck이 되는 경우 대체 방법으로 교체가 가능하다고 함
-
여기서 , 이며, correlation volume pyramid의 level m()을 계산하는 과정을 수식으로 나타낸 것으로, average pooling 과정(첫번째 term)이 두번째 term으로 표현될 수 있음을 보임
-
두번째 term을 보면 correlation volume의 각 원소는 과 커널을 통해 pooling된 사이의 내적으로 표현될 수 있기 때문에, 계산이 오래 걸리는 전체 correlation volume pyramid를 pre-compute하는 대신, pooling된 만 pre-compute 해놓고 이후 과정에서 필요한 correlation feature 만 위의 수식으로 계산하여 사용하면 연산량을 절약할 수 있음
Correlation Lookup
그림 4. Loopup Operator 설명
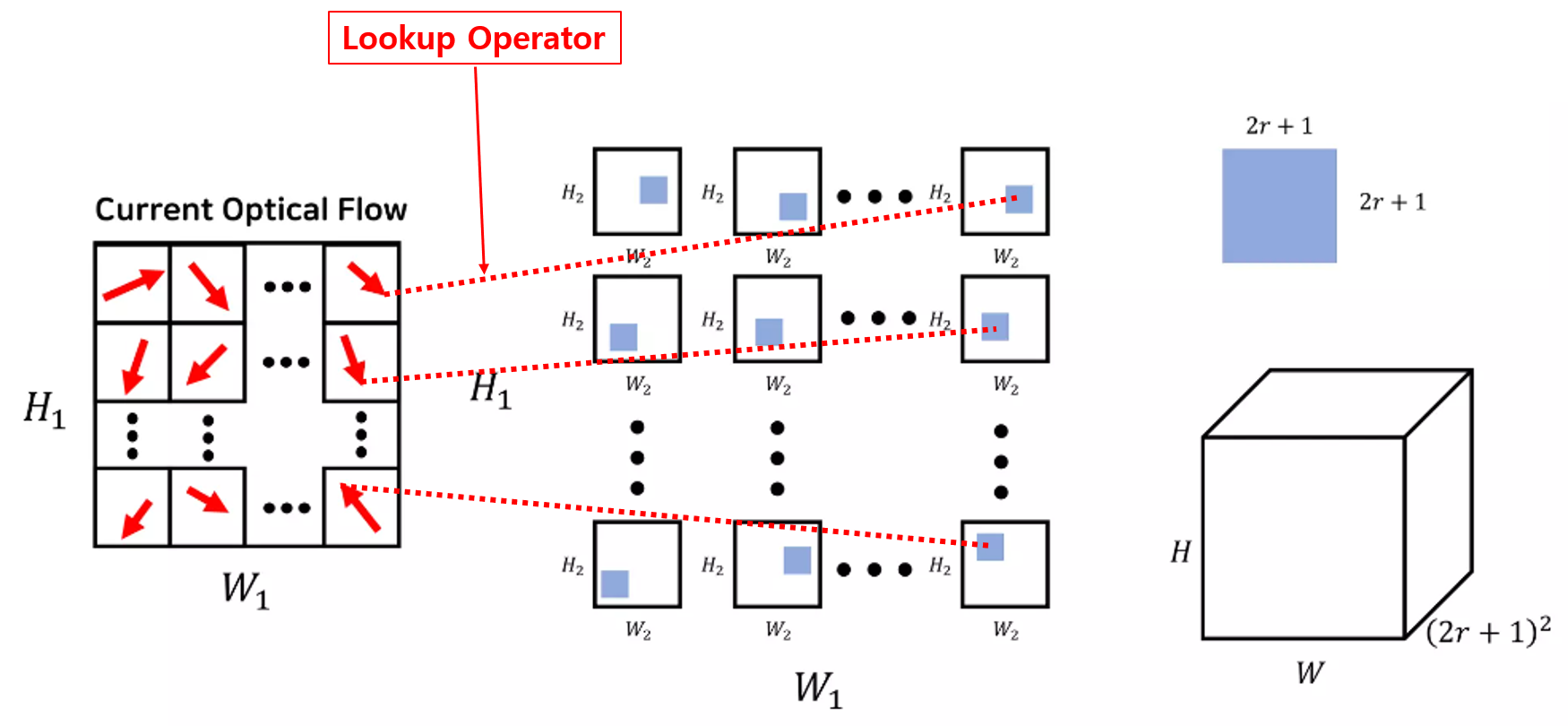
- 위의 과정에서 계산된 correlation volume pyramid에서 인덱싱을 통해 학습에 필요한 feature map을 생성하는 과정인 lookup operator 를 정의
- Optical flow 가 주어졌을 때, 상의 각 픽셀 는 와 같이 매핑됨
- 예측된 optical flow가 올바르다면, 상의 어떤 target pixel과 주어진 optical flow로 매핑된 상의 픽셀간 correlation이 높아야함 (3D 상에서 같은 위치에 존재하는 pixel들이기 때문에)
- 이에 근거하여, RAFT의 이후 업데이트 과정에서 상의 target pixel과 주어진 optical flow로 매핑된 상의 픽셀간 correlation을 앞에서 계산된 correlation volume pyramid에서 찾아 feature map을 구성하여 활용하고, 이렇게 correlation volume pyramid에서 우리가 원하는 픽셀간 correlation을 찾는 과정이 lookup operator임
- <그림 4>는 이러한 lookup operator의 동작을 보여주며, 아래의 식과 같이 optical flow로 매핑된 상의 픽셀 주변 local neighborhood(상의 매핑점 와 L1 길이로 이내에 존재하는 지점)의 correlation을 동시에 활용
- 즉, <그림 4>와 같이 상의 target pixel(왼쪽 그림의 빨간색 화살표의 시작점)을 예측된 optical flow(화살표)를 이용하여 상의 픽셀(화살표의 끝점)에 매핑하고, 그 주변 픽셀들의 correlation 값들(가운데 그림의 파란색 박스, 총 개의 correlation 값)을 하나의 차원으로 concat하여 오른쪽 아래 그림과 같은 feature map(픽셀 하나당 개의 correlation 값이 생성되어 최종적으로 크기)을 생성
- 이때, optical flow는 실수이고, 이미지 pixel의 좌표는 discrete하므로 optical flow로 매핑된 위치에 대한 값을 bilinear sampling을 통해 계산
- 모든 pyramid level에 대해 같은 lookup 연산을 수행하며, 즉, level k에서는 의 grid를 사용해 indexing이 수행됨.
- 또한 모든 pyramid level에 대해 같은 radius를 적용하여, 낮은 level에서는 더 넓은 영역의 context 정보를 포함하게 됨(예를 들어 가장 낮은 level인 k=4의 경우, r=4가 256 픽셀 영역에 대응됨) (논문에서는 radius라고 표현하기도 했고, 수식에서도 L1 거리로 이내의 correlation 값들을 활용하는 것으로 나와서 논문만 읽었을 때는 <그림 4>의 사각형 모양이 아닌 원 영역의 correlation 값들을 활용하는 것으로 보였는데, 코드에서 크기를 사용)
- 각 pyramid level에서 추출된 feature map은 하나의 tensor로 concatenate됨
- Iterative Updates and Training
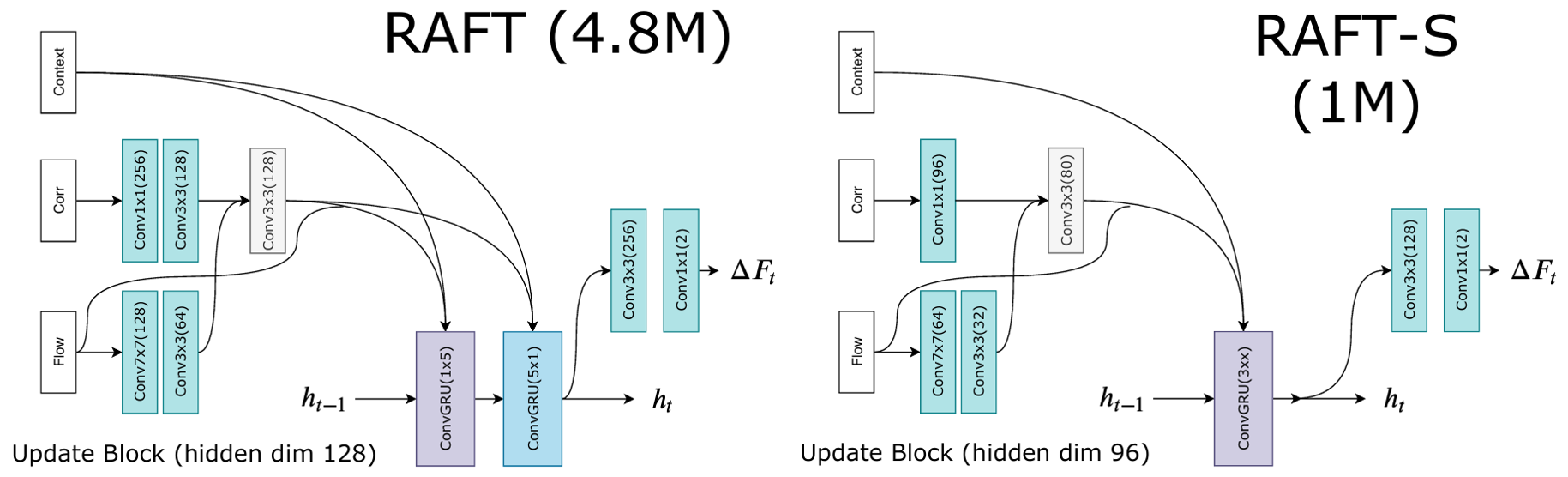
그림 5. Update Operator 구조
-
입력 데이터 는 예측된 optical flow feature, correlation feature, context feature가 concatenate된 데이터
- Optical flow feature는 이전 step에서 예측된 optical flow 결과에 두 개의 convolutional layer를 적용하여 추출된 feature
- Correlation feature는 위의 lookup 연산을 통해 생성된 feature map에 두 개의 convolutional layer를 적용하여 추출된 feature(논문에서는 이렇게 말하고 있는데 그림에는 optical flow feature 정보를 concat하여 convolutional layer를 한 번 더 거치는 것으로 표현됨. 코드 확인해 보니 그림처럼 concat 수행.)
- Context feature는 context network의 출력값을 그대로 사용
-
Update를 수행하는 convGRU는 다음과 같이 구성 ( 등을 계산할 때, 를 concat하고 convolutation 수행) (RNN, LSTM, GRU)
-
convolutional layer를 convGRU, convGRU로 분리된 두 개의 GRU로 대체했을 경우 큰 연산량 상승 없이 receptive field를 효과적으로 넓힐 수 있음
-
마지막 GRU cell의 은닉층에 두 개의 convolutional layer를 적용하여 flow update 량, 를 추정하며, 이를 이용하여 다음과 같이 최종적인 optical flow를 계산 및 업데이트 함
그림 6. Upsampling 방법
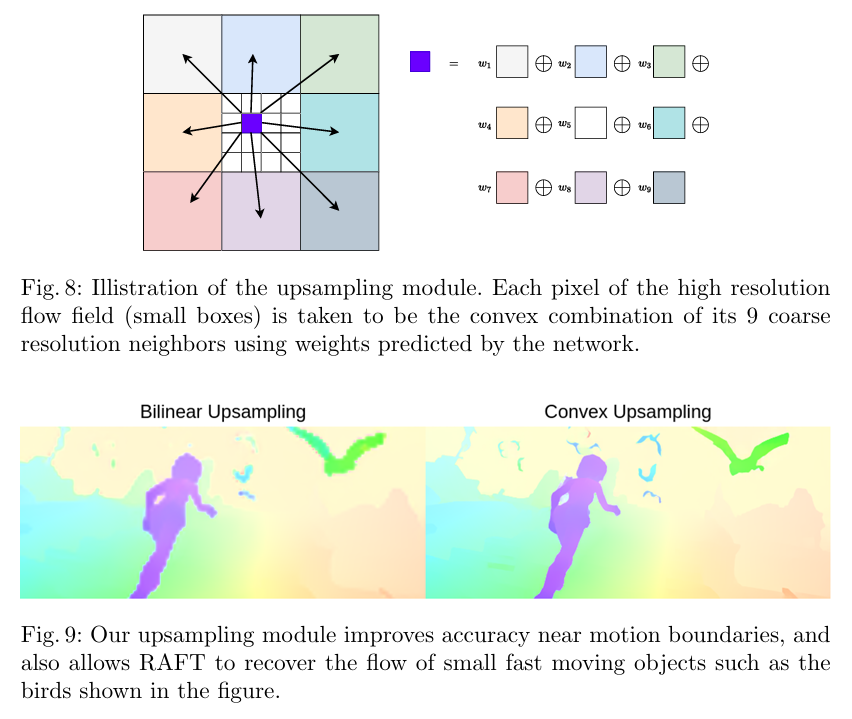
- 다만 이렇게 출력된 optical flow는 원본 이미지 해상도 대비 1/8이므로 Upsmapling이 필요하며, 일반적인 bilinear upsampling보다 convex upsampling이 성능이 더욱 좋았다고 함
- 네트워크 출력은 원본 해상도 대비 1/8 크기이므로, 네트워크 출력(optical flow)의 한 셀은 원본 영상의 8x8 픽셀에 대응됨
- Upsampling을 통해 원본 영상의 8x8 픽셀 중 하나(<그림 6>의 작은 파란색 박스)의 값을 결정하기 위하여, 해당 픽셀에 대응되는 네트워크 출력(optical flow)의 셀 1개뿐 만 아니라 그 주변 8개의 셀(<그림 6>의 큰 색깔 박스들)까지 총 9개의 optical flow 값을 가중합함
- 각 가중치 또한 신경망을 통해 결정되며, GRU의 최종 출력층에 optical flow를 결정하는 branch와는 별개로 추가적인 두개의 convolution layer를 적용하여 의 가중치 mask를 계산 (네트워크 출력의 하나에 셀에 대응되는 8x8 픽셀 각각에 대한 9개 optical flow의 가중치)
- 전체 upsampling 과정은 위와 같이 구한 mask와 Pytorch의 unfold 함수를 통해 구현됨
- 최종적인 loss function은 다음과 같으며, 모든 iteration의 output()과 ground-truth 간의 L1 거리를 합하여 구성 (실험을 통해 로 결정)
3. 실험 결과(Experiments)
- "FlyingChairs"(batchsize 12, 100k iterations), "FlyingThings"(batchsize 6, 100k iterations)라는 합성데이터셋에서 네트워크를 순서대로 pre-train
- 이후 Sintel, KITTI-2015, HD1K 데이터셋에서 100k iteration 만큼 finetuning
- 최종적으로 KITTI-2015에서 50k interation 만큼 finetuning
- 학습시 에서 쪽 branch(이전 step의 GRU cell로 연결됨)는 gradient 전파가 일어나지 않도록 설정
그림 7. 실험결과
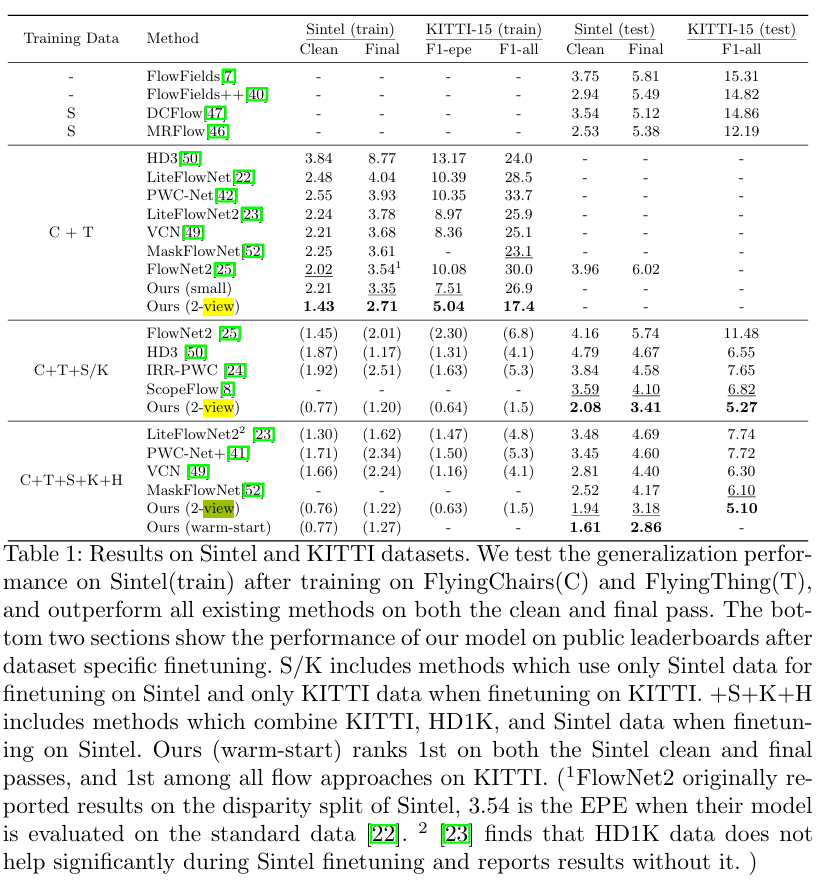
그림 8. Ablation study
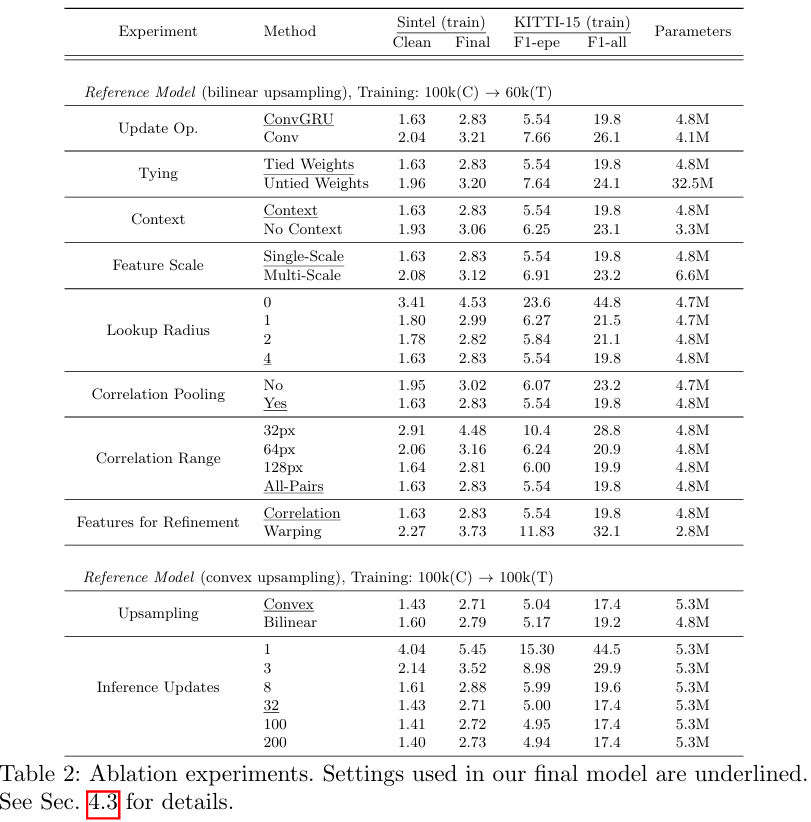
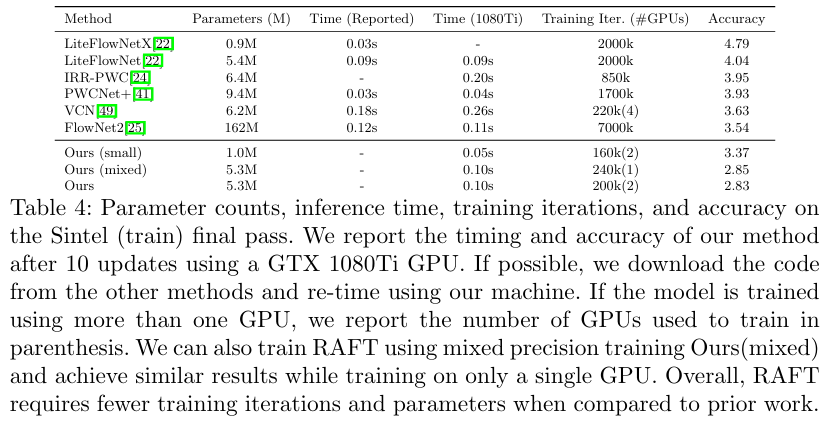
그림 9. 속도 및 네트워크 크기
개인적인 생각
-
해당 연구자의 후속 연구인 DROID-SLAM도 비슷한 구조(GRU를 통한 지속적인 iteration으로 결과를 refine)를 가지고 있고, 해당 연구실의 유명 논문 중 하나인 stacked hourglass network도 이전 step의 keypoint heatmap을 입력받아 같은 네트워크 구조를 iteration하여 결과를 refine하는 구조를 가지고 있는데, 이런 방식이 성능 향상에 도움이 크게 되는 듯
-
또한 본 논문과 DROID-SLAM의 주요 contribution으로 기존 딥러닝 기반 방법의 고질적인 문제인 일반화 성능을 크게 향상시켰다고 명시하고 있는데, iteration을 돌리는 구조 덕분인 것 같음(GT와 유사한 값을 바로 예측하기도 하지만 refinement를 위하여 GT와 이전 step의 차이 값 또한 예측을 하기 때문에 좀 데이터가 증강되는 효과가 있는 것 같기도??)
