1. 논문 개요(Abstract)
-
제목: BA-NET: DENSE BUNDLE ADJUSTMENT NETWORKS (Link)
-
저자: Chengzhou Tang(Simon Fraser University), Ping Tan(Simon Fraser University)
-
발표지(학회): ICLR 2019
-
발표일: 2019
-
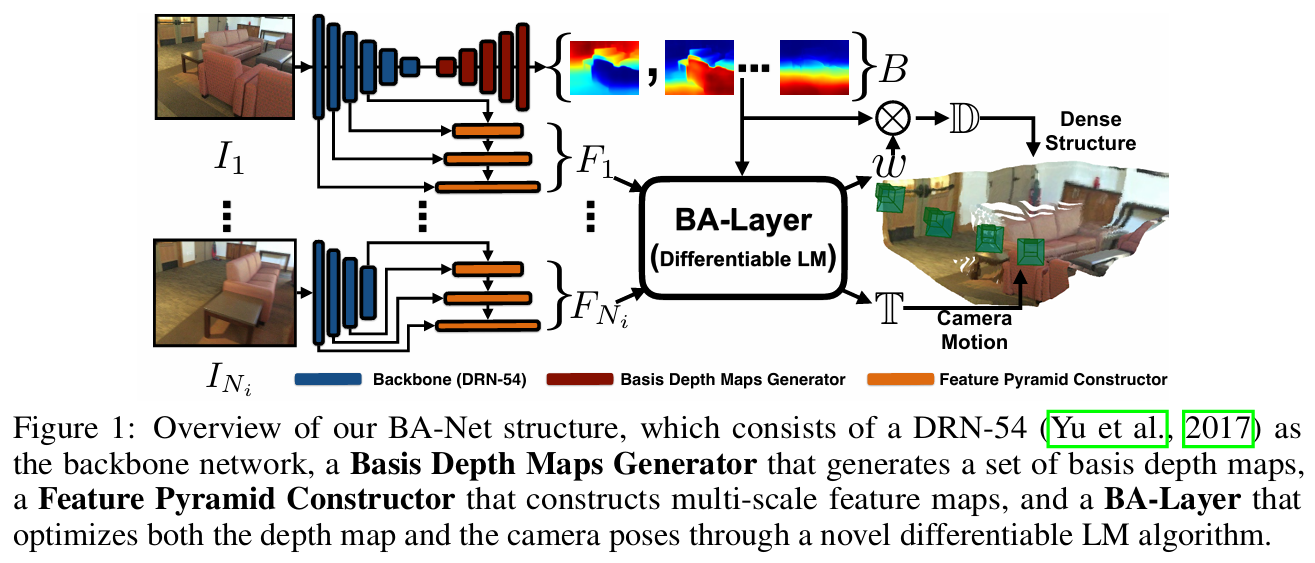
개요: 본 논문은 structure-from-motion(SfM) 문제를 해결하기 위해 feature-metric bundle adjustment(BA)를 수행하는 네트워크 구조를 제안하며, 모든 파이프라인이 미분 가능하게 설계되어 네트워크가 BA 문제를 풀기에 알맞는 학습을 할 수 있도록 한다. 또한 본 논문에서는 새로운 depth parameterization 방법을 제시하며, 처음에는 몇 개의 basis depth map을 생성하고, BA 과정을 통해 이러한 basis depth map을 선형 결합하여 최종적인 depth map을 결정한다. BA, depth map 생성은 모두 end-to-end로 학습된다.
그림 1. BA-Net 개요
2. 내용(Methods)
- Feature Extraction and Depth Basis Estimation
그림 2. 특징 추출을 위한 feature pyramid 구조 및 각 feature map의 시각화 결과
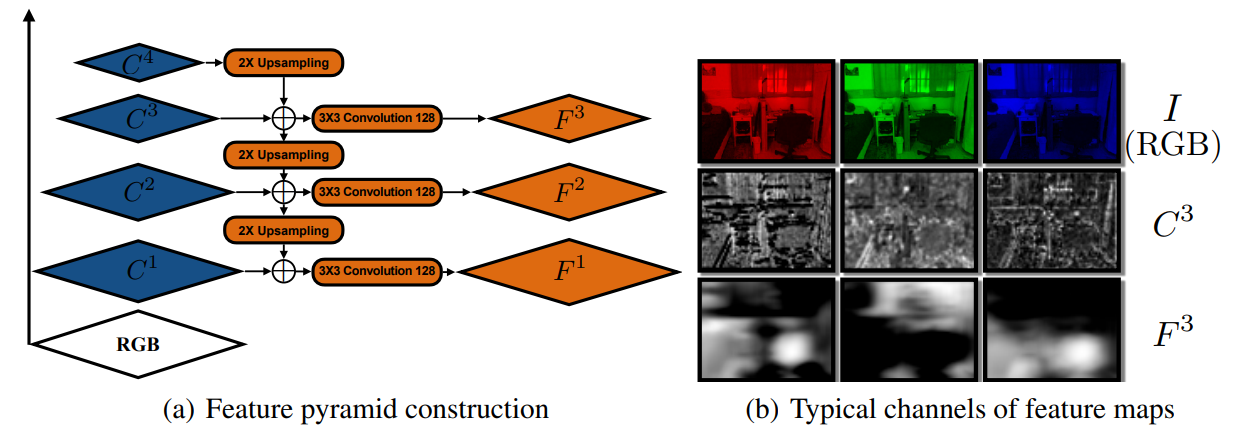
그림 3. 각 feature map 별 offset에 대한 변화량 시각화 결과

-
네트워크의 encoder 부분은 DRN-54(Yu et al., 2017)이라는 구조를 사용하였으며, 원래의 DRN-54는 dilation convolution을 사용했지만, BA-Net에서는 연산량을 줄이기 위해 보통의 3*3 convolution을 사용함
-
이렇게 구성된 encoder는 feature extraction 및 depth basis estimation을 위한 두 decoder에서 공유함
-
Feature extraction은 feature pyramid networks(FPN)처럼 여러 크기의 feature를 추출하여 다양한 시야에 대응할 수 있도록 함
-
DRN-54의 conv1, conv2, conv3, conv4에서 마지막 residual block을 라고 설정하며, 이는 각각 stride {1, 2, 4, 8}에 해당함
-
각 를 의 크기와 일치하도록 bilinear interpolation을 통해 upsampling함
-
와 upsampling된 를 concatenate하여 를 생성하고, 이렇게 을 구성하여, 뒤에서 BA를 통한 최적화를 위한 feature로 사용(feature-metric bundle adjustment(BA)에서 사용되는 feature)
-
BA-Net에서는 pre-train된 backbone network의 feature를 사용하는 것이 아니라 위와 같이 정의된 를 사용하여 BA 과정에 알맞는 feature가 출력되도록 네트워크를 학습시킴
-
그 결과, <그림 2>의 (b)에서는 기존 DRN-54의 feature인 와는 달리 의 feature들이 각 영역 별로 구별되는 값을 갖고 있음
-
또한, <그림 3>에서는 offset에 따른 각 feature 값의 차이를 볼 수 있는데, 다른 것들에 비해 는 offset에 따라 확실히 구별되는 차이(offset이 적으면 적은 feature 값 차이, offset이 크면 큰 feature 값 차이)를 보이고, 이에 따른 확실한 global optima를 가지고 있어, 카메라의 pose를 최적화해야하는 BA 과정에 사용하기에 알맞는 feature라고 할 수 있음
-
-
Depth basis는 "Deeper depth prediction with fully convolutional residual networks"라는 논문의 decoder 구조에서 마지막 단을 128 channel로 변형하여 사용
-
일반적인 BA에서는 카메라 pose와 함께 3D point의 위치 또한 함께 최적화하며, 만약 모든 픽셀에 대한 depth 값을 최적화하고 크기의 이미지를 사용할 경우, 최적화 해야 할 파라미터의 수는 약 76.8k개가 되어 연산량이 크게 늘어남
-
BA-Net에서는 마지막 128 channel을 각각 basis로 활용하여 다음과 같이 최종 dapth map을 basis들의 선형 결합으로 추론함
- 뒤의 BA 과정에서는 전체 depth 값이 아닌, 선형 결합의 128개 가중치인 만을 최적화하게 되어 효율적인 계산 가능
-
- Bundle Adjustment Layer
-
일반적인 BA 과정의 목적함수(photometric error)는 다음과 같고, 는 입력된 th 이미지, 는 transformation matrix, 는 픽셀, 는 th 이미지의 각 픽셀 의 깊이정보를 의미하며, 최적화 대상이 되는 파라미터는 이다.
-
ORB-SLAM 등에서 사용하는 re-projection error 기반 BA의 목적함수는 이다(여기서 는 3D point).
-
이러한 re-projection error 기반 BA는 이미지 상에 나타난 객체들의 꼭지점 및 가장자리 등의 정보만 활용한다는 점, 각 keypoint끼리의 matching이 필수적이지만 그 과정에서 outlier(서로 다른 keypoint끼리 matching되는 경우)들이 많아 RANSAC등의 추가적인 방법이 적용되어야 한다는 점, 하지만 이러한 방법들도 올바른 matching 결과를 보장하지 못한다는 점 등의 문제점을 가지고 있음
-
위와 같은 이유로 저자들은 photometric error 기반 목적함수를 사용하고자 하였지만, 이 또한 error의 값이 non-convexity하게 증가하여 초기값에 매우 민감하다는 점, 이미지 색상에 영향을 주는 요소(광량 등)에 민감하다는 점, 움직이는 객체 등에 의해 발생하는 outlier에 민감하다는 점 등의 문제점을 가지고 있음
-
-
위와 같은 문제점을 해결하기 위해 저자들은 feature-metric difference에 기반한 BA 목적 함수를 제시함
-
여기서 는 입력 이미지 의 feature를 의미하며, 위의 feature extraction 단계에서 추출된 값이다.
-
즉, 여러 요소에 민감한 픽셀값 기반의 photometric error 대신, 신경망에 의해 추출되어 여러 요소에 강건하고, BA 과정에 최적화된 feature 값을 기반으로 목적함수를 구성하여 성능 향상을 이루고자 함
-
-
위에서 언급했듯이, 모든 픽셀에 대한 깊이 정보를 업데이트하면 업데이트 대상 파라미터가 너무 많아지는 문제가 발생하므로, basis depth 들의 가중치를 최적화하는 방식으로 최종적인 목적함수를 구성
-
는 생성된 basis dapth들을 의미하며 크기이고, 는 의 th column임
-
즉, 는 에 해당하는 depth가 됨
-
초기값 를 학습하여 활용하면 더욱 빠른 수렴이 가능함
-
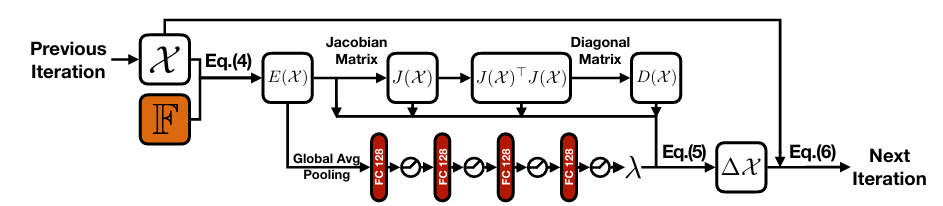
그림 4. BA layer의 single iteration 과정
-
이러한 목적함수를 사용하였을 경우, 이를 최적화 하기 위한 일반적인 Levenberg-Marquardt(LM) 알고리즘의 업데이트 식은 다음과 같음(참고)
- 이때, 는 Jacobian matrix, 는 근사된 Hessian matrix, 는 의 diagonal matrix, 는 dumping factor이다.
-
따라서, <그림 4>와 같이 LM 알고리즘 과정을 구현하였으며, 그 과정에서 전체 과정을 미분 불가능하게 만드는 다음의 두가지 요소를 해결하여, 전체 파이프라인이 backpropagation을 통해 학습 될 수 있도록 함
-
기존 LM 알고리즘은 일정 threshold 만큼 업데이트 과정이 수렴하여야 알고리즘 끝나는데, 이러한 if-else 기반의 종료 조건은 미분 불가능한 요소이므로 그냥 정해진 횟수(본 논문에서는 각 pyramid level에서 5번씩 총 15번)만큼 업데이트를 수행
-
Dumping factor 또한 목적함수의 현재 값에 따라서 if-else 기반으로 결정되며(목적함수가 감소하지 않으면 를 크게하고, 목적함수가 감소하면 를 줄임), 본 논문에서는 이러한 문제를 해결하고 최적의 dumping factor를 찾아 성능을 향상시키기 위해 <그림 4>와 같이 MLP 구조를 통해 예측(현재의 목적함수 에 Global Average Pooling(GAP)를 적용하고 MLP에 입력)(ReLU를 사용하여 가 0보다 작아지지 안도록 함)
-
최종적으로 LM 알고리즘 식에 따라 를 계산하고 다음 iteration에 입력하여 업데이트
-
- Loss Function
-
Camera pose를 최적화하기 위한 loss, depth map을 최적화하기 위한 loss 두 가지로 구성됨
- Camera Pose Loss: 단순한 L2 loss 사용
- Depth Map Loss: BerHu Loss 사용
3. 실험 결과(Experiments)
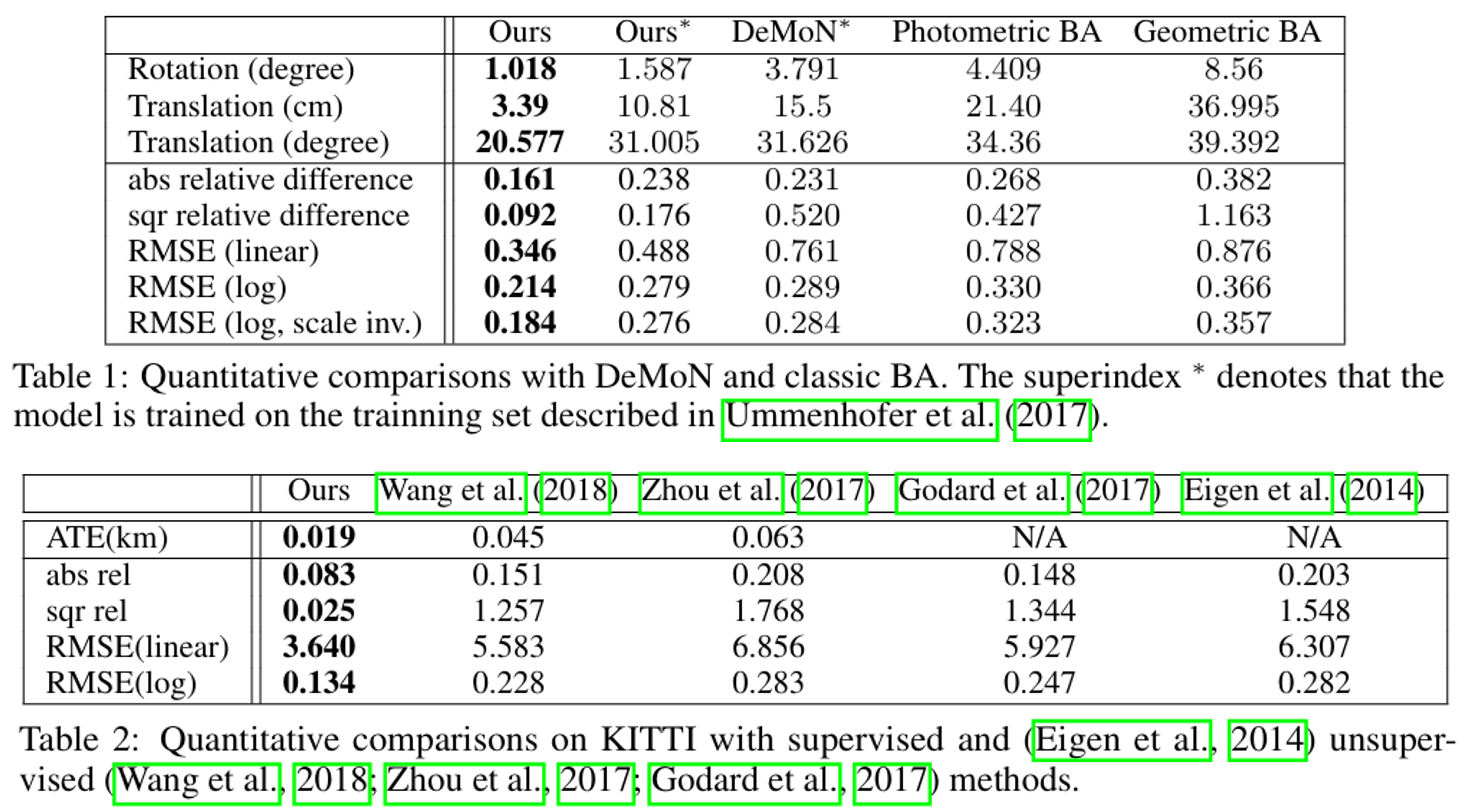
그림 5. DeMoN, KITTI 데이터셋 적용 결과
-
DeMoN, KITTI 등의 데이터셋에서 높은 성능을 달성
-
전체 모델의 동작 시간은 약 95.21ms(backbone(DRN-54): 15.04ms, Feature Pyramid: 5.87ms, Basis Depth Generator: 9.81ms, BA-Layer Optimization: 67.22ms)
-
하드웨어 정보는 따로 밝히지 않았지만, GPU 메모리가 12gb라고 함
-
BA-Layer Optimization 과정이 가장 많은 연산 시간을 요구
-
그림 6. Ablation Study 결과
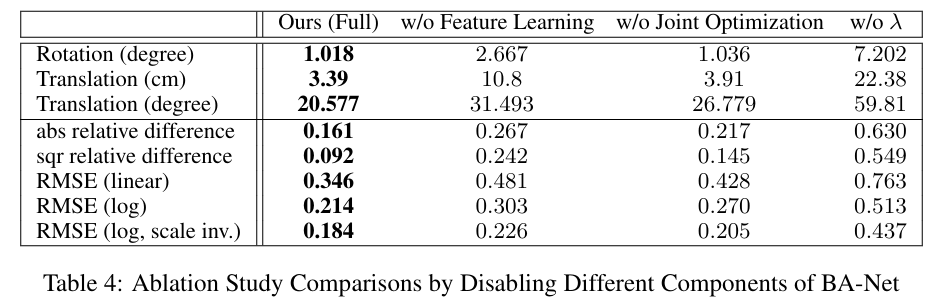
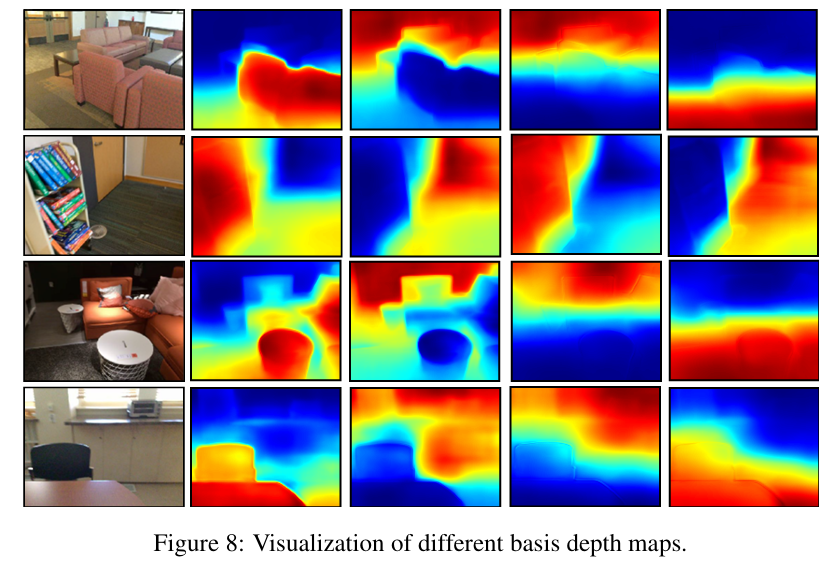
그림 7. Basis depth map 예시
개인적인 생각
- 저자들이 제시한 미분 불가능 요소들이 실제로 문제가 되는 지는 의문
- If-else 들이 미분 불가능 요소가 맞긴 한데, tensorflow나 pytorch같은 딥러닝 프레임워크를 써서 전체 코드를 작성하면 그냥 backpropagation 될 거 같다는 생각??(일단, loss function으로 사용하는 BerHu Loss 부터가 조건문이 들어가 있기도 하고...)
