벡터란
- 벡터(vector): 숫자를 원소로 가지는 리스트(list) 또는 배열(array)
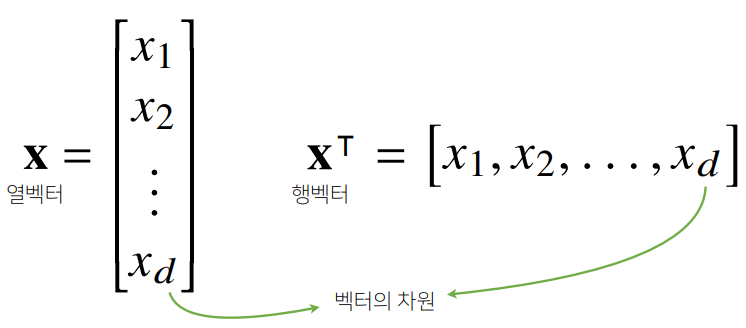
- 공간에서의 한 점을 나타냄
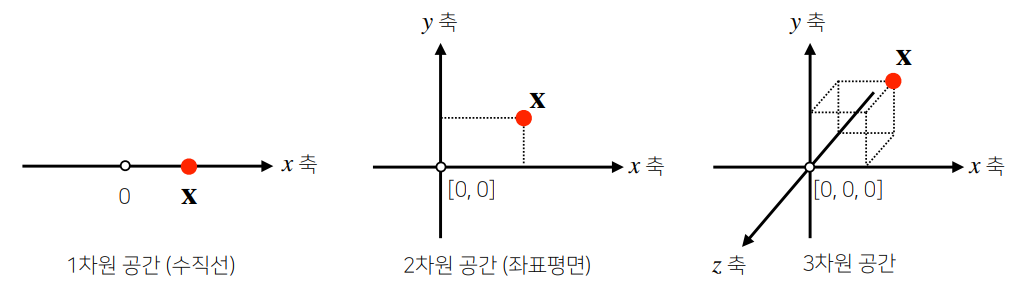
- 원점으로부터 해당 점의 상대적 위치를 표현
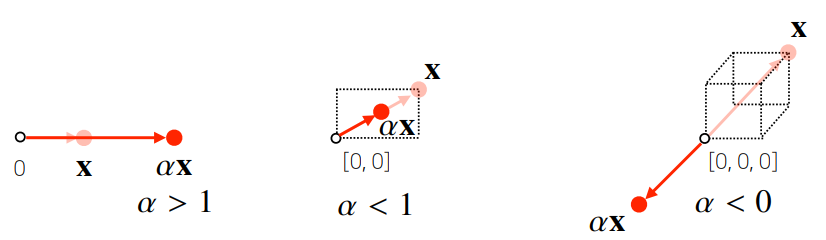
- 숫자(스칼라)를 곱해주면 방향은 그대로, 길이만 변함 →
벡터의 연산
기본 사칙 연산
- 다수의 벡터 간에 같은 모양을 가지는 경우 덧셈, 뺄셈, 성분곱(Hadamard product) 등의 기본 사칙 연산 가능
- 두 벡터의 덧셈은 다른 벡터로부터의 상대적 위치이동을 표현
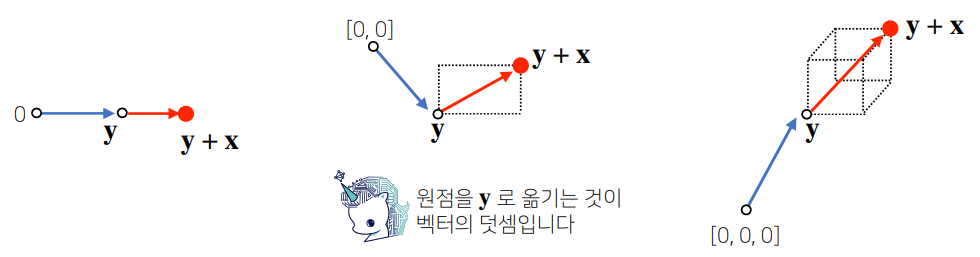
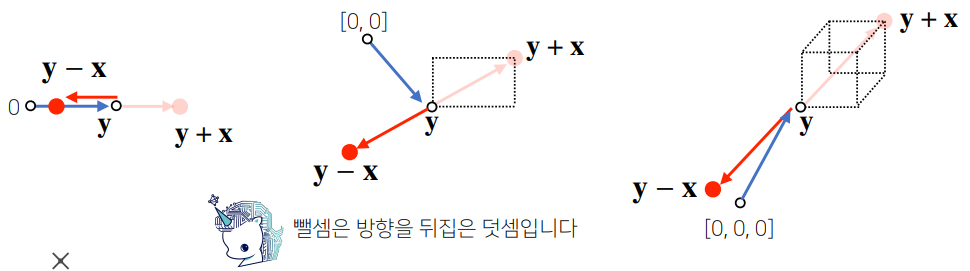
- 두 벡터의 덧셈은 다른 벡터로부터의 상대적 위치이동을 표현
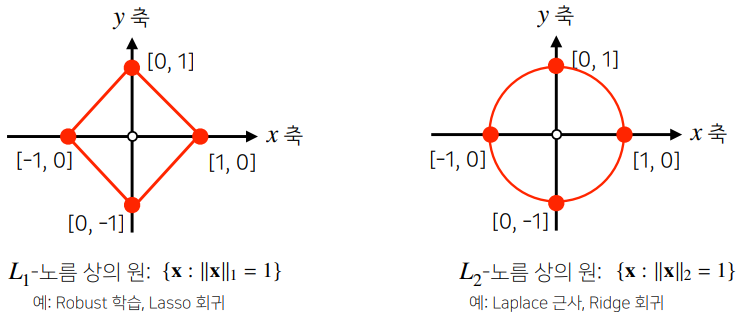
노름(norm)
- 노름(norm, ∥)은 원점에서부터의 거리를 뜻함
- -norm은 각 성분의 변화량 절대값을 단순히 더하는 것 →
- -norm은 피타고라스 정리 기반 유클리드 거리 →
- 노름의 종류에 따라 기하학적 성질이 달라지며, ML에서는 두 성질 모두 사용하는 때가 있음
두 벡터를 이용한 연산
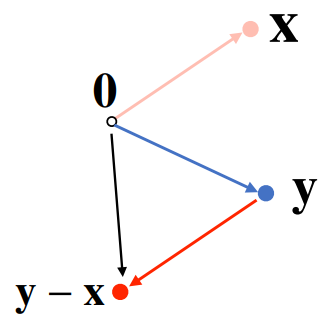
두 벡터 간 거리
- 두 벡터 사이 거리 계산에는 벡터의 뺄셈과 -norm 사용
- 뺄셈을 거꾸로 해도 거리는 같음
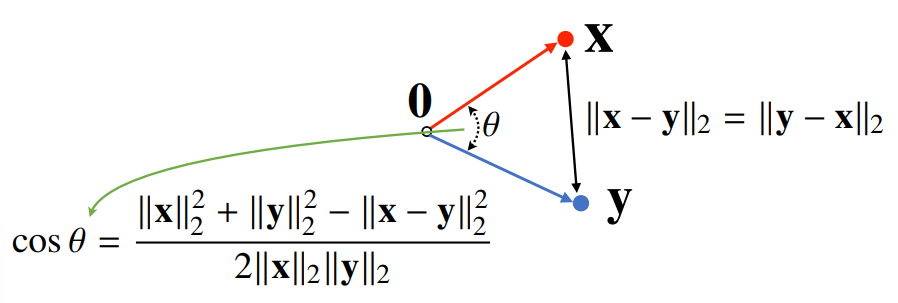
두 벡터 간 각도
- 두 벡터 사이 각도 계산에는 제2코사인 법칙과 내적을 이용
- : 벡터의 내적
내적(Inner product, Dot product)
- 내적은 정사영(orthogonal projection)된 벡터의 길이와 관련이 있음
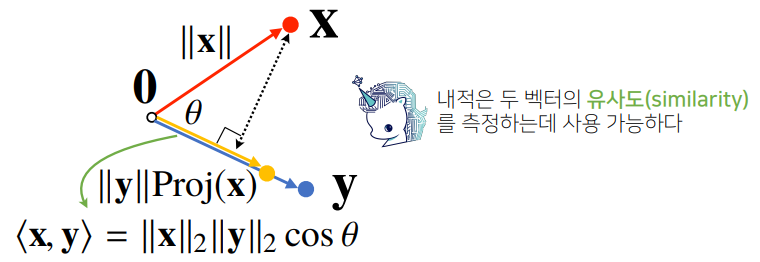
-
의 길이는 코사인법칙에 의해 가 됨
-
내적은 정사영의 길이를 벡터 의 길이 만큼 조정한 값
⇒ $<\bold{x},\;\bold{y}>=\parallel\bold{x}\parallel_2\parallel\bold{y}\parallel_2cos\,\theta
-
행렬이란
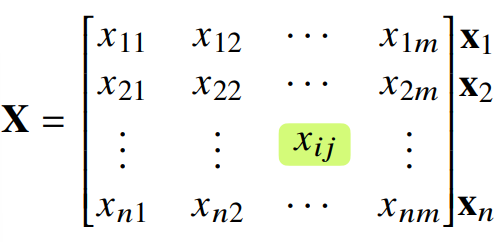
- 행렬(matrix)은 벡터를 원소로 가지는 2차원 배열
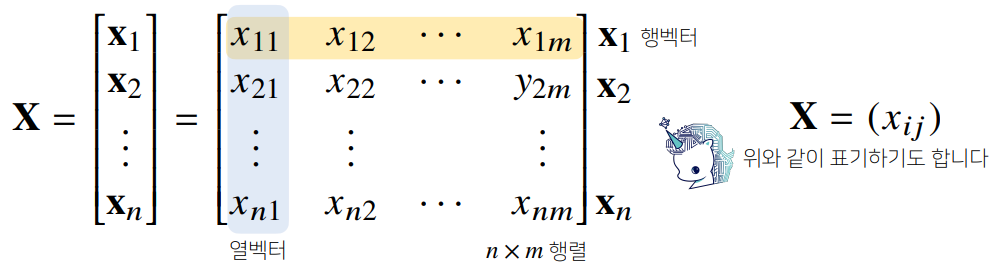
- 행(rwo)과 열(column)이라는 인덱스를 가짐
- 행렬의 특정 행(또는 열)을 고정하면 행(또는 열)벡터라고 부름
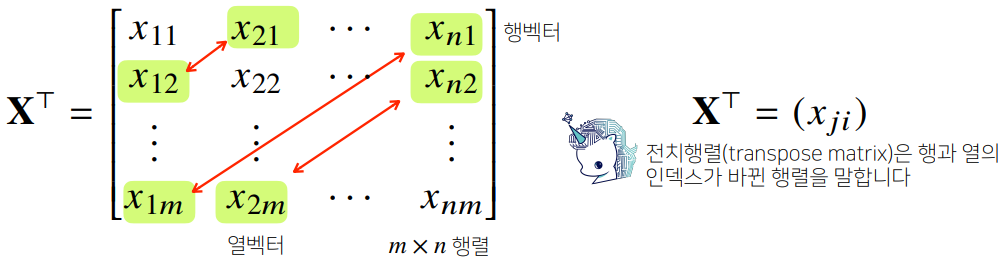
- 행과 열의 인덱스를 바꾼 행렬을 전치(transpose) 행렬이라고 함
- 벡터는 공간에서의 한 점을 의미 → 행렬은 벡터의 집합, 즉 공간에서의 여러 점들을 의미
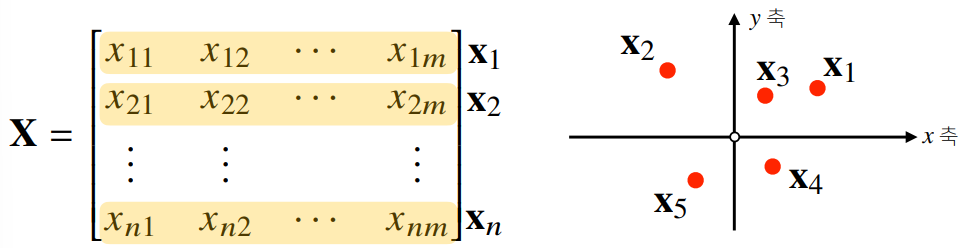
- 행렬의 행벡터 는 번째 데이터를 의미
- 행렬의 는 번째 데이터의 번째 변수의 값을 뜻함
행렬의 연산
기본 연산
- 행렬끼리 같은 모양을 가지는 경우, 덧셈, 뺄셈, 성분곱, 스칼라곱 등 기본 연산이 가능
행렬 간 곱셈
- 행렬 곱셈(matrix multiplication)은 번째 행벡터와 번째 열벡터 사이 내적을 성분으로해
X = np.array([[1, -2, 3], [7, 5, 0], [-2, -1, 2]]) # 3 × 3 크기 Y = np.array([[0, 1], [1, -1], [-2, 1]]) # 3 × 2 크기 X @ Y # numpy에서는 @ 연산으로 행렬 곱셈을 나타냄 # array([[-8, 6], [5, 2], [-5, 1]])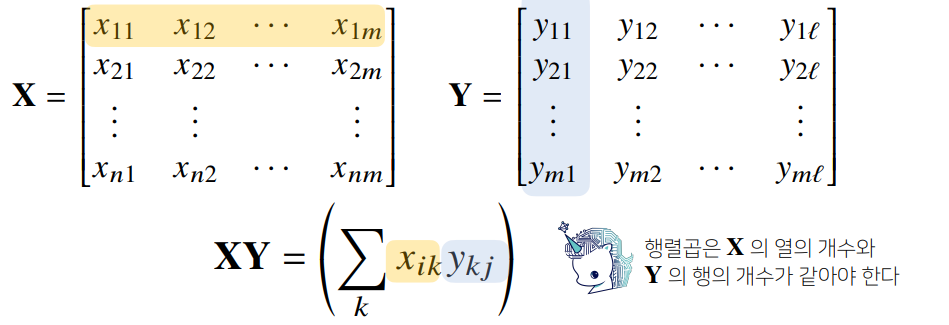
행렬 간 내적
np.inner는 번째 행벡터와 번째 행 벡터 사이 내적을 성분으로 가지는 행렬을 계산함X = np.array([[1, -2, 3], [7, 5, 0], [-2, -1, 2]]) # 3 × 3 크기 Y = np.array([[0, 1, -1], [1, -1, 0]]) # 2 × 3 크기 np.inner(X, Y) # array([[-5, 3], [5, 2], [-3, -1]]) # 3 × 2 크기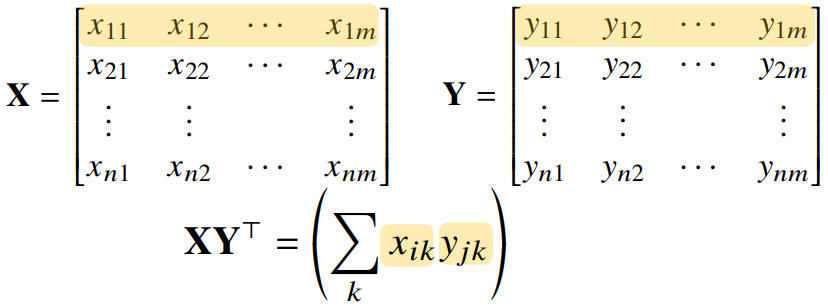
- 수학에서 말하는 내적과는 다소 다름
- 해
연산자(Operator)로써의 행렬
- 행렬은 벡터 공간에서 사용되는 연산자(operator)로 이해할 수 있음
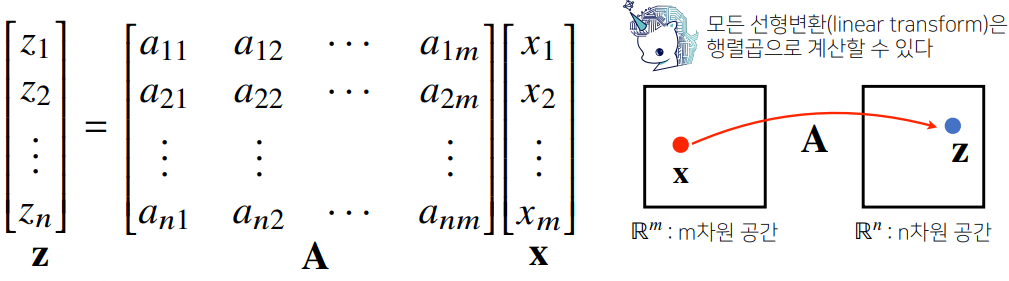
- 행렬곱을 통해 벡터를 다른 차원의 공간으로 보내거나
- 패턴을 추출할 수도 있고, 데이터를 압축할 수도 있음
역행렬
- 어떤 행렬 의 연산을 거꾸로 되돌리는 행렬을 역행렬(inverse matrix)라고 하며, 로 표기
- Numpy에서는
np.linalg.inv(X)로 사용 가능 - 역행렬은 행과 열 크기가 같은 정사각행렬이면서, 행렬식(determinant)가 0이 아닌 경우에만 계산할 수 있음
- Numpy에서는
- 역행렬을 계산할 수 없는 행렬이라면, 유사역행렬(pseudo-inverse) 또는 무어-펜로즈(Moore-Penrose) 역행렬인 를 이용
- Numpy에서는
np.linalg.pinv(X)로 사용 가능 - 이를 이용하는 경우 연립 방정식의 해를 구할 수 있음
- (데이터가 변수 개수보다 많거나 같은)인 경우, 데이터를 선형 모델로 해석하는 선형회귀식도 찾을 수 있음
# Scikit-Learn-based Linear Regression from sklearn.linear_model import LinearRegression model = LinearRegression() model.fit(X, y) y_test = model.predict(x_test) # Moore-Pensore-Inverse-Matrix-based Linear Regression X_ = np.array([np.append(x, [1]) for x in X]) beta = np.linalg.pinv(X_) @ y y_test = np.append(x, [1]) @ beta
- Numpy에서는

J의 틀에 몸을 녹여 맞추는 P