Ch.1 Filtering
What is an image?

(컬러) 이미지는 3D텐서: weight, height, color
R:8bit / G:8bit / B:8bit (→24bit)
min: 0 (black) / max: 255 (white)
(흑백; grayscale) 이미지는 2D 함수
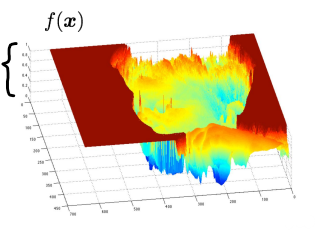
- 색깔 intensity 정규화 (0~255 → 0~1)

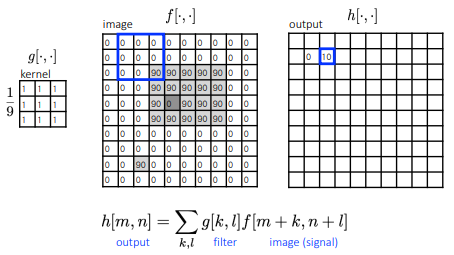
What types of image filtering can we do?
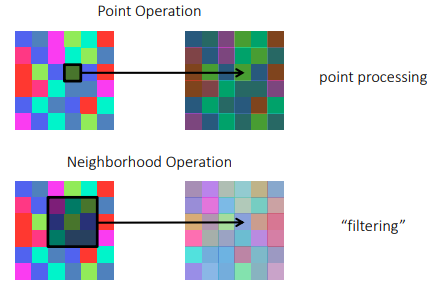
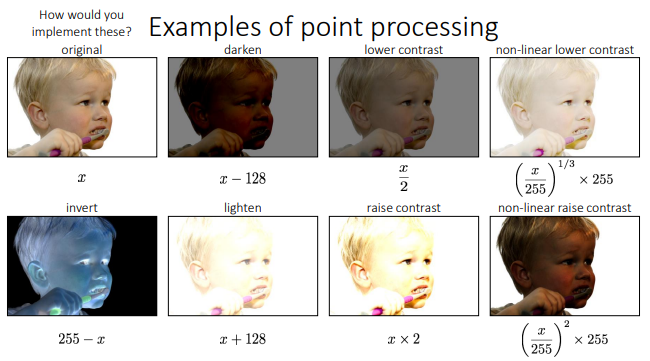
Point Image Processing
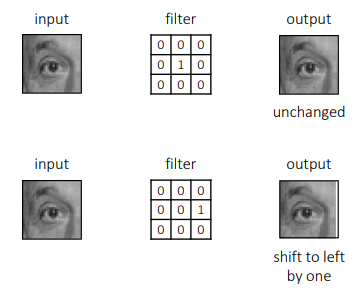
Linear Shift-Invariant Image Filtering
Replace each pixel by a linear combination of its neighbors (and possibly itself)
linear combination (선형결합)
여러개의 벡터에 스칼라 곱을 한 뒤, 그 결과들을 더하는 것
결합 방식은 필터의 커널에 의해 결정됨
동일한 커널이 모든 픽셀위치로 이동 → 모든 픽셀이 이웃 픽셀과 동일한 선형 결합 사용
Box Filter
2D rect filter / square mean filter 라고도 불림
blurring effect box filter
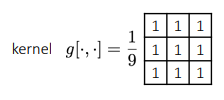
= local 평균값으로 각 픽셀 교체
k∗k 커널일때,
k//2= 중심 픽셀로부터 이웃 픽셀까지 거리
ex) 3∗3 커널일때, k//2=1, 즉 주변 1개씩
Convolution
커널을 뒤집어서 선형결합 진행
- 커널이 대칭이면, filtering = convolution
Convolution for 1D continuous signals
(f∗g)(x)=∫−∞∞f(y)g(x−y)dy
- (f∗g)(x) : filtered signal
- f(y) : filter
- g(x−y) : input signal
Convolution for 2D discrete signals
(f∗g)(x,y)=i,j=−∞∑∞f(i,j)I(x−i,y−j)
- (f∗g)(x,y) : filtered image
- f(i,j) : filter
- I(x−i,y−j) : input image
Convolution vs Correlation
Definition of discrete 2D Convolution:
(f∗g)(x,y)=i,j=−∞∑∞f(i,j)I(x−i,y−j)
Definition of discrete 2D Convolution:
(f∗g)(x,y)=i,j=−∞∑∞f(i,j)I(x+i,y+j)
- 차이점은 커널의 flip 여부
- 대부분 커널은 대칭이라 별 차이 없음
- convolution: 신호처리에 많이 쓰임 (ex. filtering, blurring, edge detection 등)
- correlation: 두 신호 or 함수의 유사도 측정에 많이 쓰임 (ex. template matching)
Seperable Filters
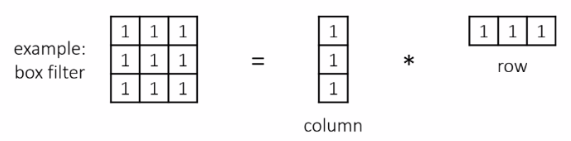
원래 이미지 M x M, 필터 커널 N x N 일때,
기존 시간 복잡도: (M∗M)∗(N∗N)=O(M2N2)
Seperable Filter 시간 복잡도: 2∗(M∗M)∗N=O(2M2N)
▶ 훨씬 빠름
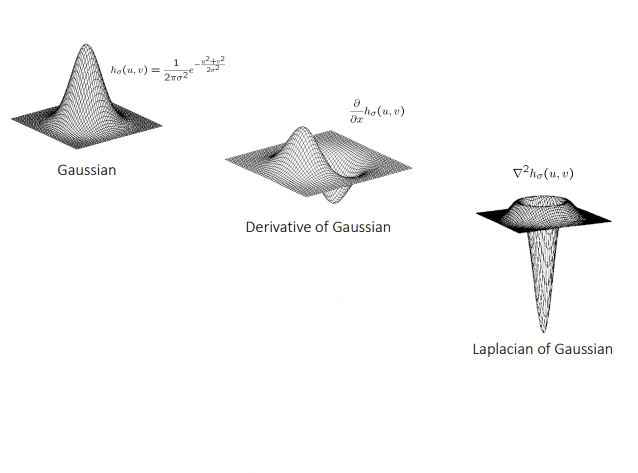
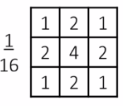
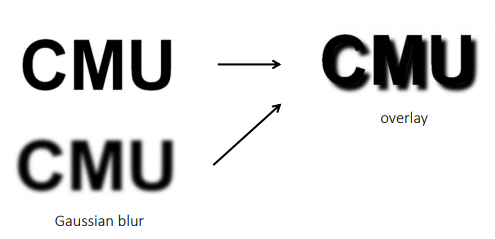
Gaussian Filter
f(i,j)=2πσ21e−2σ2i2+j2
Soft Shadow Effect
Other filters
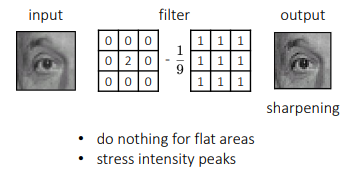
- sharpening 너무 많이 하면 노이즈 ↑
Image Gradients
What are image edges?
very sharp discontinuities in intensity
∇=∇x2+∇y2
→ 총 기울기 = |(x기울기) + (y기울기)|
Detecting edges
미분값은 불연속성이 있는 부분(=edge)에서 큼
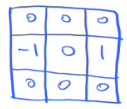
미분 값을 구하기 위해 finite differences 활용
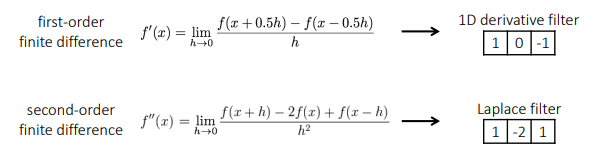
Finite Differences
1. 우극한
f′(x)=h→0limhf(x+h)−f(x)
2. 좌극한
=h→0limhf(x)−f(x−h)
3. 중앙차분
f′(x)=h→0limhf(x+0.5h)−f(x−0.5h)
4. For discrete signals
극한이 아니라, h=2로 둠
f′(x)=2f(x+1)−f(x−1)
1D derivative filter


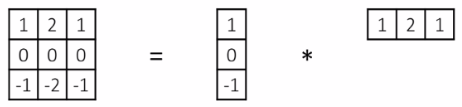
The Sobel Filter
위 필터는 미분만 수행 → noise↑
horizontal sobel filter
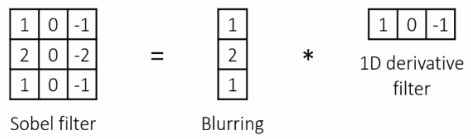
가우시안 필터 (blur) * 1차원 미분 필터 (horizontal)
- horizontal 필터 → vertical edge 찾아냄
vertical sobel filter
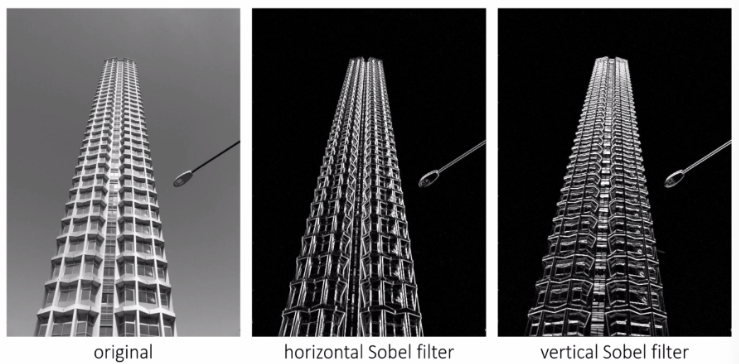
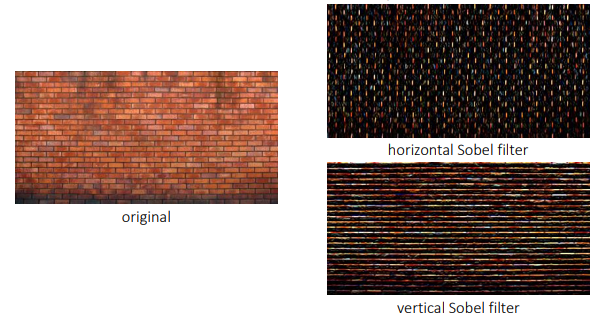
examples
Several Derivative Filters
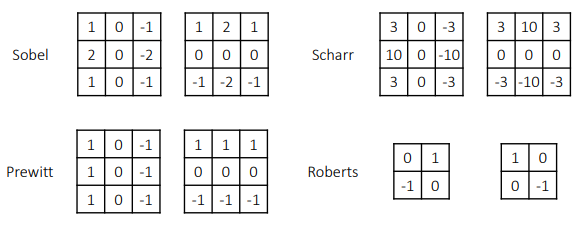
- Sobel 필터(2:1)가 Scharr 필터(10:3)보다 blur ↑
- Roberts Filter: 대각선으로 검출
Computing Image gradients
- 미분 필터 선택 (sobel, scharr, ...)
- convolution 진행
- 이미지 gradient 구성 + 방향 & 크기 계산
Gradient
기울기를 vector로 나타냄
∇f=[∂x∂f,∂y∂f]
Direction
기울기 방향 확인
θ=tan−1(∂y∂f/∂x∂f)
Amplitude
기울기 크기 절대값으로 변환
∣∣∇f∣∣=(∂x∂f)2+(∂y∂f)2
How do you find the edge of this signal?
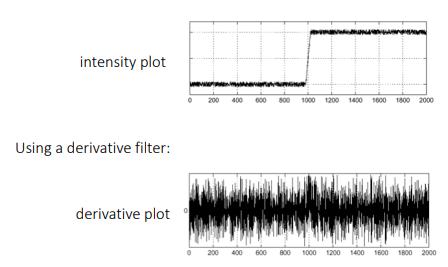
노이즈가 많으면 제대로 edge를 검출할 수 없음
- 비어있는 부분은 이웃(neighbor) 없는 애들
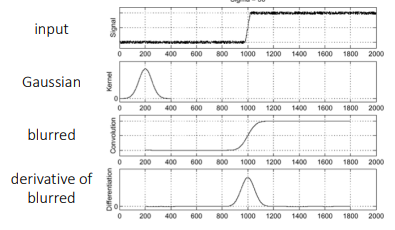
- 얼마만큼을 blur할지 적정점 찾는 것이 중요
DoG Filter
Derivative of Gaussian Filter
∂x∂(h∗f)=(∂x∂h)∗f
f : 기존 이미지
h : 가우시안 필터
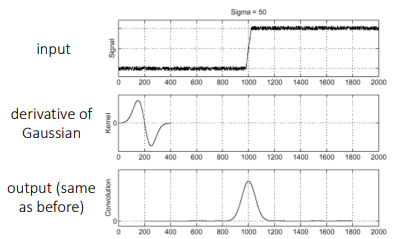
(기존 이미지 x 가우시안 필터)를 미분 → 기존이미지 x (가우시안 필터를 미분한 것)
원래 방식: O(2n2m2)
개선된 방식: O(n2m2)
▶ 더 효율적 + 더 빠름
Laplace Filter
2차 미분 필터
1차 미분
f′(x)=h→0limhf(x+0.5h)−f(x−0.5h)
2차 미분
g(x)=f′(x)라고 볼때,
g′(x)=h→0limh2g(x+0.5h)−g(x−0.5h)
g′(x)=h→0limh2f′(x+0.5h)−f′(x−0.5h)
여기서, f′(x+0.5h)는,
f′(x+0.5h)=h→0limhf(x+0.5h+0.5h)−f(x+0.5h−0.5h)
f′(x+0.5h)=h→0limhf(x+h)−f(x)
f′(x−0.5h)도 마찬가지로,
f′(x−0.5h)=h→0limhf(x)−f(x−h)
따라서,
f′′(x)=g′(x)=h→0limh2f(x+h)−2f(x)+f(x−h)
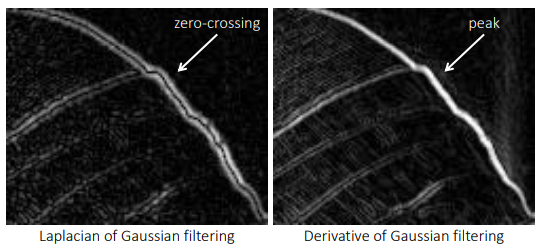
LoG Filter
Laplacian of Gaussian Filter
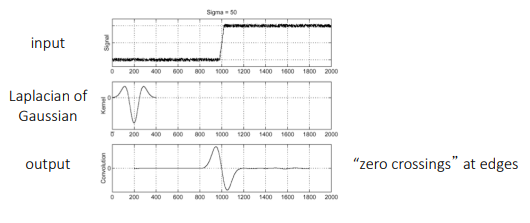
LoG vs DoG
2D 가우시안 필터