robot
1.urdf

Unified Robot Description Format로봇 모델에 대한 정보들을 명세해 놓은 규격아래와 같은 것들을 표현 가능kinematic and dynamic descriptions of the robotVisual representation of the ro
2.RK4 (Runge-Kutta 4th Order)
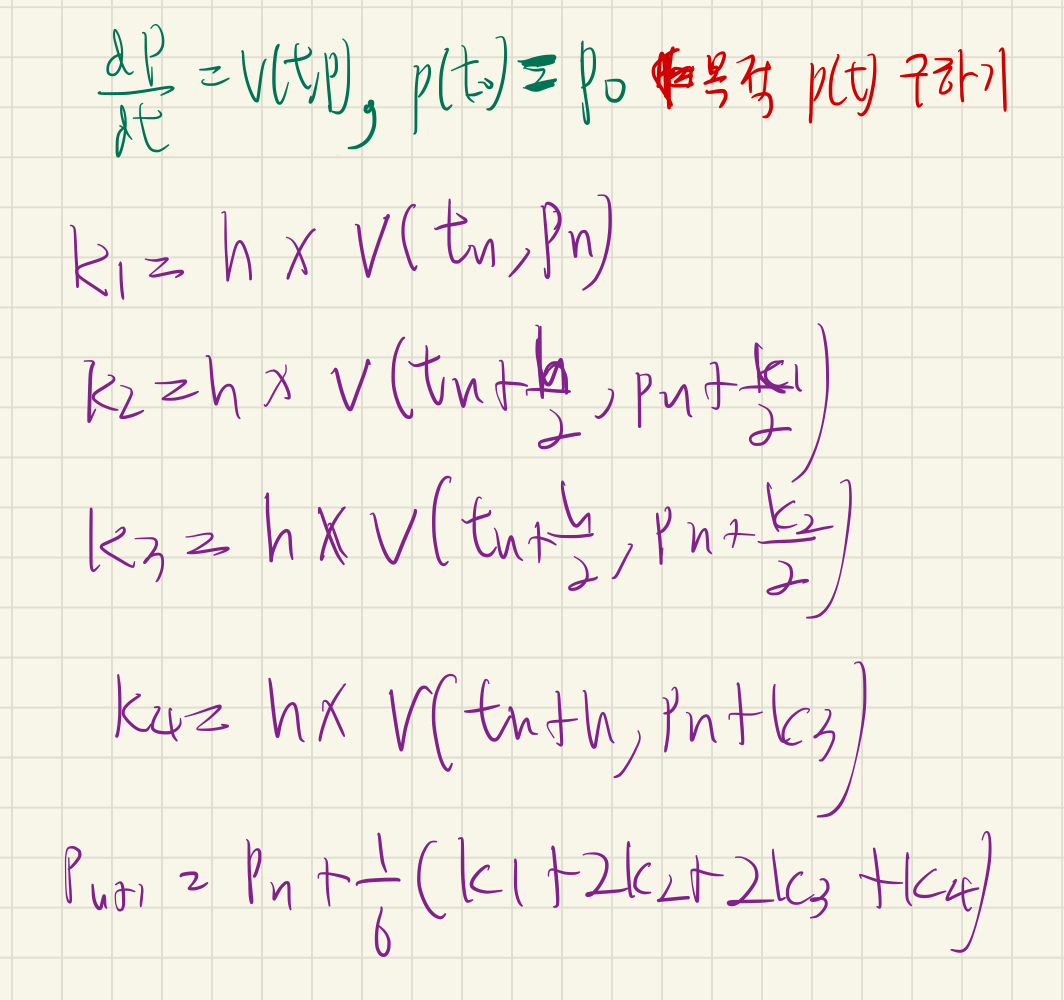
Runge-Kutta 4차 오더 (Runge-Kutta 4th Order)는 수치 적분 및 미분 방정식의 수치 해법 중 하나로, 미분 방정식을 풀 때 주로 사용되는 방법 중 하나입니다. 이 방법은 시간에 따라 변하는 연속적인 시스템을 모델링하고 시뮬레이션하는 데 특히
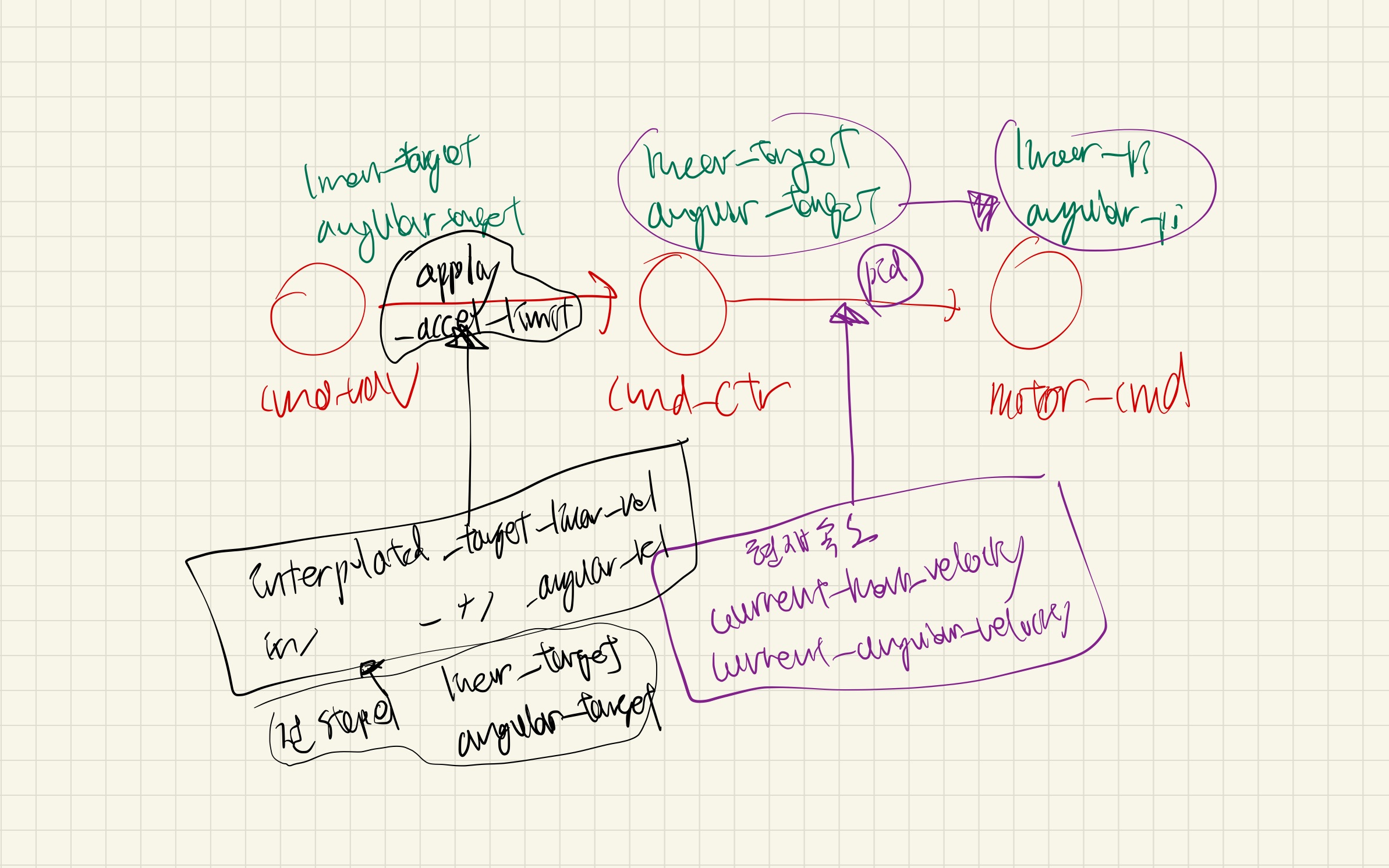
3.Interpolated_target_velocity
4.[Dynamics Model] Differential Drive Model, Car-like Model, Holonomic Model
dynamics model은 로봇의 움직임과 행동을 예측하고 제어하는 데 사용되는 수학적 모델개념: 차동 구동 모델은 로봇에 두 개의 병렬 바퀴가 있는 구조를 기반으로 합니다. 이 두 바퀴는 각각 독립적으로 구동될 수 있으며, 이를 통해 로봇은 앞으로 진행하거나, 회전
5.등속 운동 공식
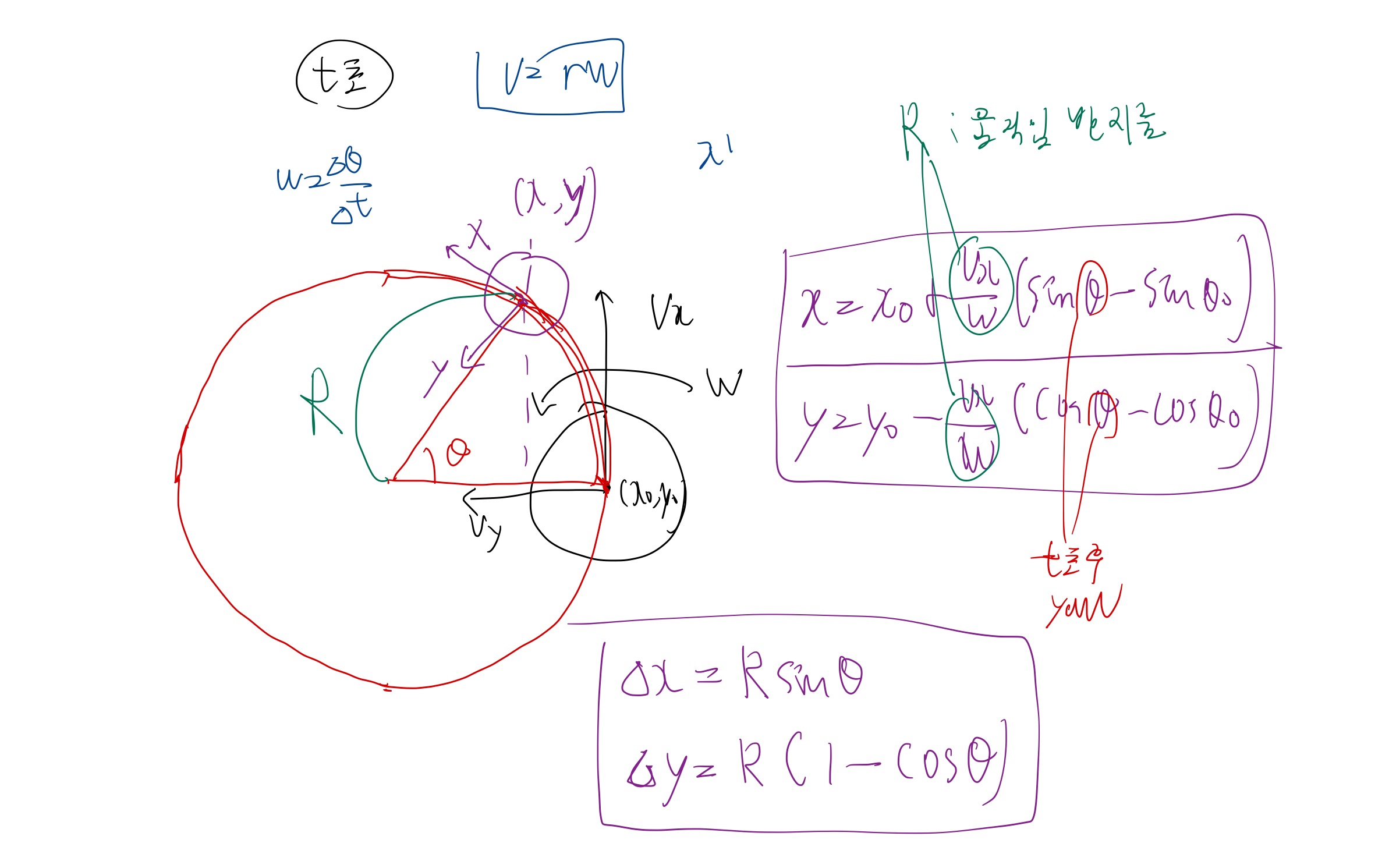
Vx, w 만 있을 경우 Vx, Vy, w가 다 있을 경우
6.odometry 란?
로봇이나 다른 이동체가 어떻게, 얼마나 이동했는지를 측정하는 방법이 개념은 주로 로봇공학에서 찾아볼 수 있으며, 자동차, 드론, 심지어는 가상의 이동체를 포함한 다양한 이동 시스템에서도 사용오도메트리는 이동체의 현재 위치와 방향을 추적함으로써, 시작 위치로부터의 상대적
7.역센서 모델
로봇이 주변을 인식할 때, 여러 센서(예: 레이저 스캐너, 카메라)를 사용해 정보를 수집이 정보를 바탕으로 로봇은 주변의 물체나 장애물이 어디에 있는지, 그리고 그 물체나 장애물이 얼마나 가까운지를 파악센서 측정값 해석: 역센서 모델은 로봇의 센서가 감지한 것(예: 물
8.Occupancy Grid Map
이 지도는 환경을 격자(grid)로 나누고, 각 격자(cell)가 물리적 공간의 특정 부분을 대표각 격자는 그 위치가 장애물에 의해 차지되어 있는지(occupied), 비어 있는지(free), 아니면 알 수 없는지(unknown)를 나타내는 확률 값격자(Grids):
9.Quadtree
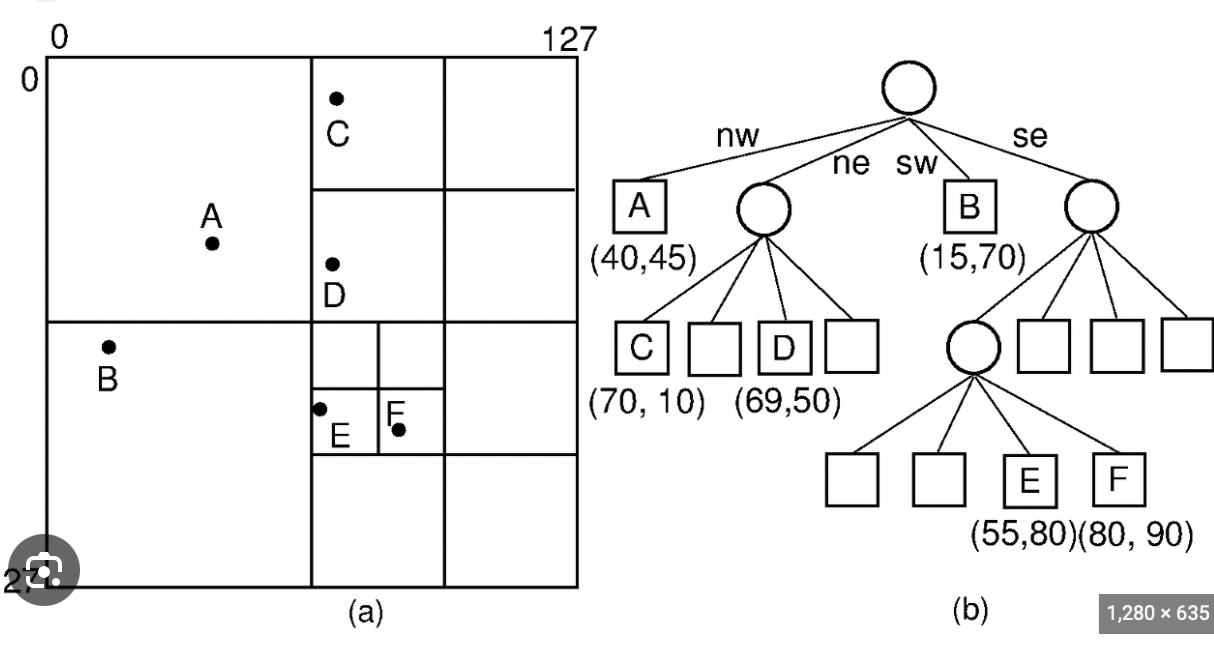
Quad tree는 계층적 데이터 구조 중 하나이 구조는 2차원 공간을 표현하고 관리하는 데 효율적이며, 특히 이미지 처리, 공간 인덱싱, 그리고 로봇의 환경 인식 및 맵핑에서 중요한 역할Quad tree는 공간을 재귀적으로 네 개의 동일한 사분면으로 분할하여 구성각
10.Multi Agent Path Finding
Multi-Agent Path Finding (MAPF)은 여러 에이전트가 서로 충돌 없이 각자의 목적지까지 최적 혹은 준최적의 경로를 찾아 이동하는 문제를 해결하는 연구 분야입니다. 이 분야는 로보틱스, 자동차, 비행 통제 시스템, 비디오 게임 등 다양한 분야에서 중
11.AMCL (Adaptive Monte Carlo Localization)
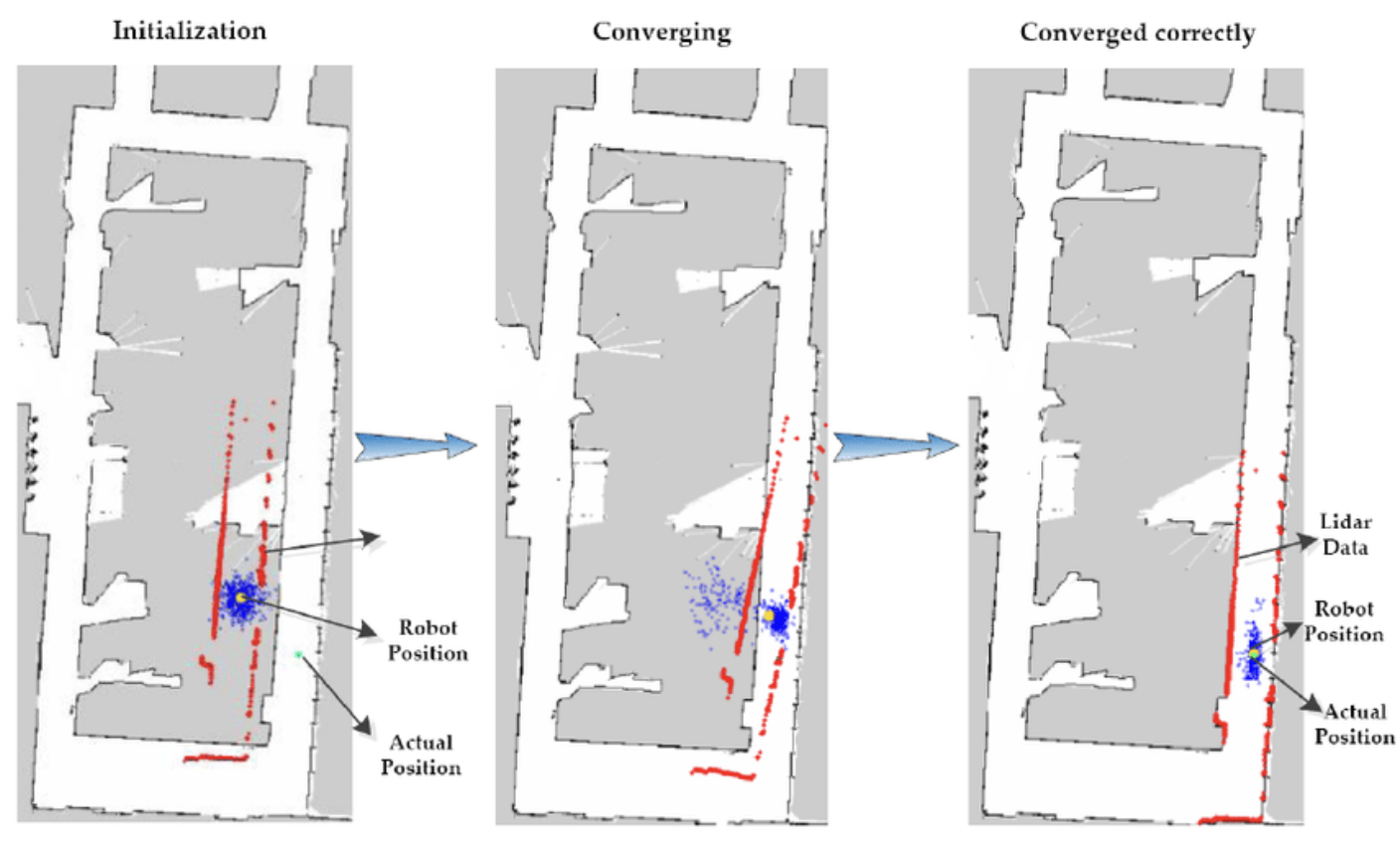
종종 Particle Filter Localization이라고도 불림로봇이 자신의 위치를 추정하는 데 사용하는 확률적 접근 방식AMCL은 비선형 시스템과 비가우시안 노이즈에 효과적으로 대응할 수 있으며, 특히 확장된 환경에서 로봇의 위치를 추적하는 데 유용AMCL은 여
12.pcd file
.pcd 파일은 주로 3차원 점군 데이터를 저장하는 데 사용되는 파일 형식.pcd는 Point Cloud Data 파일의 약자이며, PCL(Point Cloud Library)에서 정의한 형식입니다. .pcd 파일은 ASCII 또는 바이너리 형식으로 저장될 수 있으며,
13.visual localization ? WIO?
Visual localization과 odometry (특히 WIO: Wheel-Inertial Odometry)는 로보틱스와 자율 주행 기술의 핵심 개념이 두 가지 기술을 이해하는 것은 로봇이 환경을 인식하고 이동하는 방식에 대한 이해를 높이는 데 도움이 됨Visua
14.Marching Cube