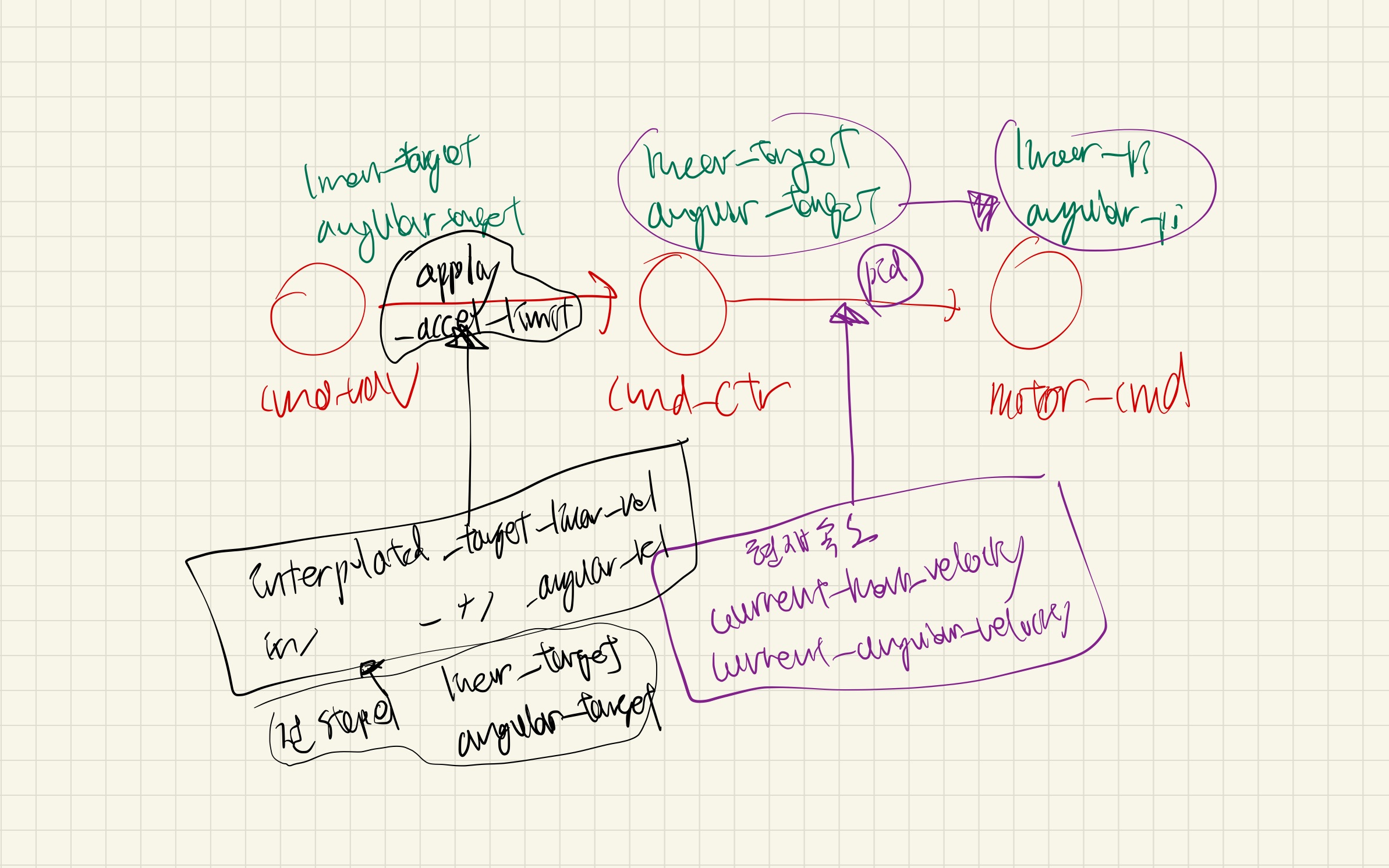
motion controller 로직
-
target 속도의 비교 대상이, 1번이 아닌 2번인 이유?
- 1번: 실제 로봇 속도
- 2번: interpolated_target_velocity
-
이유:
- PID제어가 error의 크기에 비례해서 큰 변경을 가하기 때문에 실제 로봇 속도와 비교하도록 하면
pid 지연에 의해 실제 로봇 속도가 천천히 바뀜 -> error가 작음 -> PID가 작은 변경만 가함 -> 실제 속도가 더 천천히 바뀜의 순환이 일어나 비정상적으로 느리게 값이 바뀜
-
motion controller의 목표가 특정 속도까지 특정 가속도로 값을 바꾸는 것을 목표로 하기 때문에
- 실제 pid 제어의 변경량 (실제 속도의 변화 속도)가 목표 가속도에 미달인 경우 변경량을 더 크게 주도록 하기 위해 저렇게 한 것으로 보입니다.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.