Chat GPT
- Runge-Kutta 4th Order는 수치 적분 및 미분 방정식의 수치 해법 중 하나로, 미분 방정식을 풀 때 주로 사용되는 방법 중 하나입니다.
- 이 방법은 시간에 따라 변하는 연속적인 시스템을 모델링하고 시뮬레이션하는 데 특히 유용
- 로봇공학 및 제어 시스템 분야에서도 많이 사용됩니다.
- Runge-Kutta 4차 오더는 4단계의 계산 과정을 통해
시간에 따른 시스템의 상태를 업데이트합니다. - 이 방법은 이전 단계의 정보를 사용하여 다음 단계의 값을 예측하고 시뮬레이션하는 데 사용됩니다.
- 이러한 4개의 단계는 다음과 같이 정의됩니다.
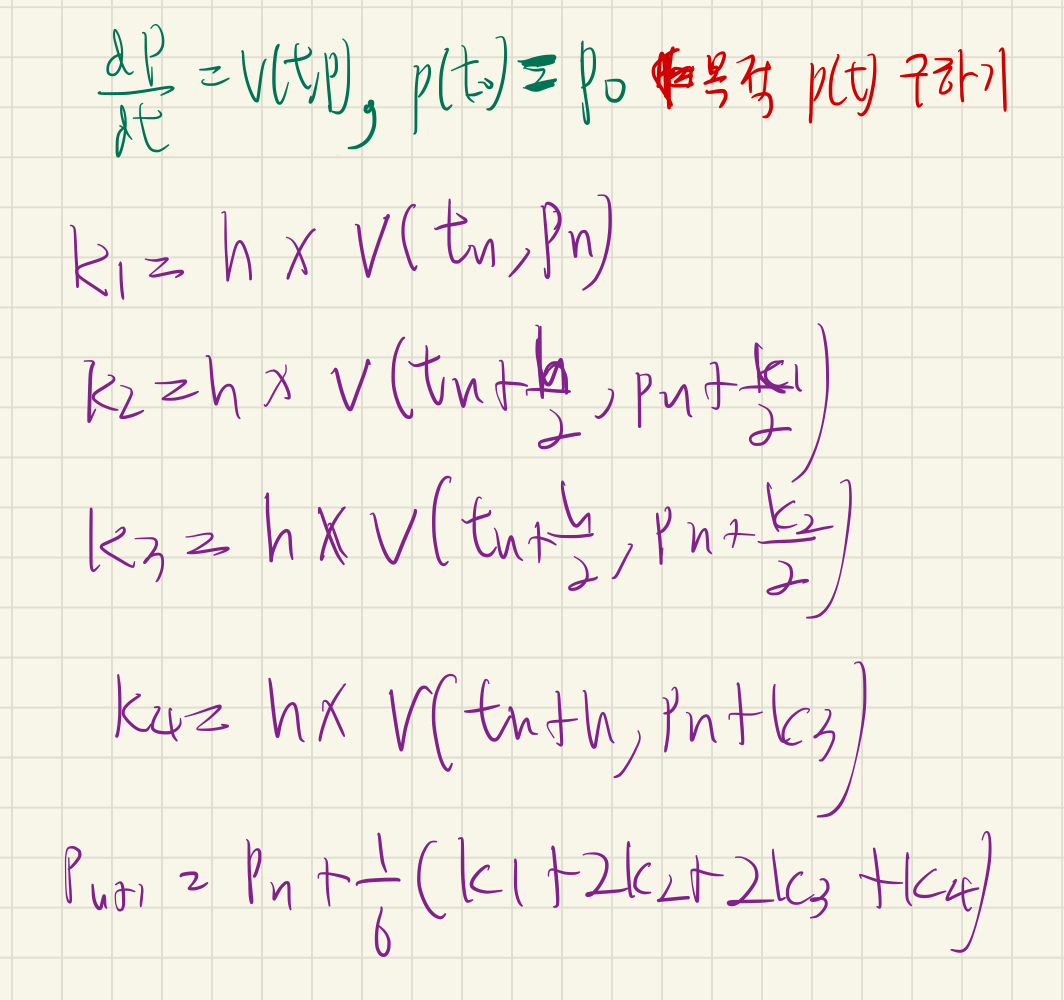
- 이러한 4개의 단계를 통해 시간 t에서 t+h 까지의 시스템 상태를 업데이트하고, 그 다음 시간 단계로 진행합니다.
- Runge-Kutta 4차 오더: 4개의 중간 기울기를 사용하여 상태를 예측
- 로봇 제어와 시뮬레이션에서 Runge-Kutta 4차 오더는 로봇의 동역학 모델링, 경로 추적, 제어 시스템 시뮬레이션 등 다양한 응용 분야에서 활용됩니다.
수학적 근거?
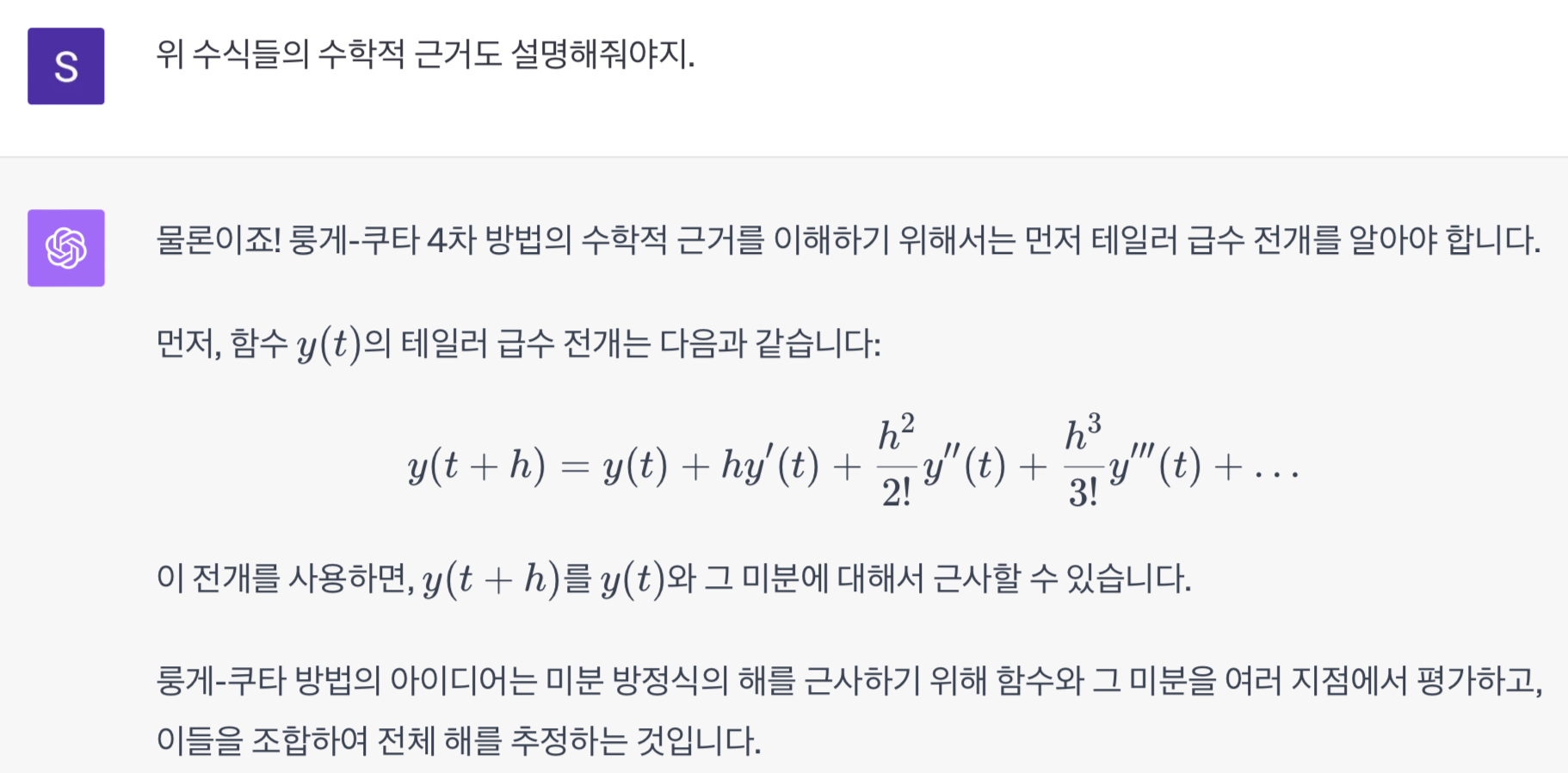
- TODO: 위 수학적 근거를 이해할 필요가 생기면, 그 때 공부하기
설명 발췌
- mujoco 등 물리 엔진에서 사용하는 dynamics approximation (https://homes.cs.washington.edu/~todorov/papers/ErezICRA15.pdf)
- 물리엔진 알고리즘 중에서도 성능이 뛰어난 것으로 보입니다
- 2d 모바일 로봇 적용을 위한 formulation이 있습니다 ( https://pdfs.semanticscholar.org/2ec4/3627b2d9f60d443b23fe5369e8e6c54f3051.pdf )
- RK4의 timescale은 0.15, 0.05초의 두 가지를 테스트해보았으나 큰 성능 차이는 없음 (양쪽 모두 action sequence는 0.15초 interval로 뽑음)
위 논문들 abstract
Simulation Tools for Model-Based Robotics: Comparison of Bullet, Havok, MuJoCo, ODE and PhysX
- 안봐도 됨.
Design a Nonlinear MPC Controller for Autonomous Mobile Robot Navigation System Based on ROS
- https://pdfs.semanticscholar.org/2ec4/3627b2d9f60d443b23fe5369e8e6c54f3051.pdf (MPC의 개념에 대해 이해하고 싶을 때 읽으면 좋은 논문인듯하다)
- This paper presents the tutorial approach for the design and construction of the Nonlinear Model Predictive Control controller for the four-wheeled Omni robot in the orbital tracking problem.
- The designed controller is implemented in the navigation stack system for the robot to follow the specified trajectory smoothly and avoid collision with surrounding obstacles simultaneously.
- The results are presented in both theory and simulation cases owing to the ROS platform to illustrate the validity and effectiveness of the method for the trajectory tracking problem combined with the navigation stack system.
- Besides the advantage of the designed navigation stack is also demonstrated through comparison with the TEB planner.

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.