우선 라즈베리파이에서 카메라를 사용하려면
카메라 사용 가능 설정을 해줘야 한다.
$ sudo raspi-config위 명령어를 사용해서 camera에 관한 내용을 찾아보면 된다.
카메라를 enable로 바꿔준다. 항상 설정을 바꾸었을 때는 다음 명령어로 재부팅 해주는 습관을 들이는 것이 좋다.
$ sudo reboot now내가 사용한 라즈베리파이는 3B+ 버전인데
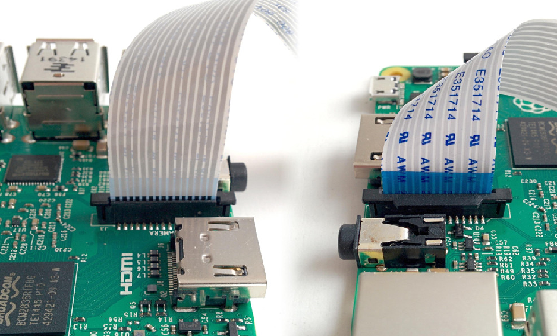
HDMI 포트 옆에 카메라 모듈을 장착하는 소켓이 있다.
방향을 맞게 잘 끼워야 한다.
아래 사진처럼 파란 라벨이 붙어 있는 면이 USB 포트를 향해야 한다. 혹시 파란 라벨이 없다면 금속 단자 부분이 HDMI 포트로 향하도록 끼워주면 된다.
이제 ROS 에서 설정해줘야 한다.
ROS를 설치하면 기본 패키지로 raspicam_node 가 있을 것이다.
경로는 /opt/ros/kinetic/share 에 있다.
$ rqt_image_view를 실행시키면 카메라가 잘 작동되는 것을 확인할 수 있는데, 무슨 이유에서인지 ar marker 인식을 위한 설정을 해줘도 되지 않는 문제가 있다.
ar marker 를 사용한다면 다음 명령어로 기존의 raspicam_node 를 삭제하고 새로 받아야 한다.
$ cd /opt/ros/kinetic/share
$ sudo rm -r ./raspicam_nodesudo rm -r 명령어는 모든걸 없애버릴 수 있는, 아주 무시무시한 명령어이므로 이 명령어를 사용할 때는 가급적이면, 지울 대상이 있는 경로로 들어가서 Tab을 사용해서 자동완성으로 확인하고 지우길 권장한다.
참고로 디렉토리를 삭제할 때는 rmdir 명령어를 쓰는데 이 명령어는 디렉토리 내부에 파일이 아무것도 없을 때만 지워진다. 따라서 디렉토리를 지울 때는
rm -r 을 사용해주면 된다.
항상 새로운 패키지를 받을 때는 ~/catkin_ws/src 경로에 받아줘야 빌드가 가능하다.
위에서 기존 raspicam_node를 삭제했다면 다음 명령어로 빌드에러가 생길거다.
삭제 전에 다음 명령어로 빌드가 될지도 모르겠다.
$ cd ~/catkin_ws && catkin_make 아무튼 위 명령어로 빌드되지 않는다면 아래 명령어로 빌드해준다.
$ catkin_make --pkg raspicam_node패키지 설치가 완료되었으므로 launch 파일에서 기존 것을 사용하든지 새로 만들어서 이름을 바꿔서 써도 좋다.
다만, launch파일 중에서 이름에 autocapture라고 있는 것을 사용해야 별도로 rqt_image_view를 사용했을 때, 바로 볼 수 있다고 한다.
