SLAM_Projcet
1.ORB SLAM2 빌드 & 실행

환경 준비 ORB SLAM 2 clone https://github.com/raulmur/ORB_SLAM2 https://robot-vision-develop-story.tistory.com/5 dataset https://robot-vision-develop-sto
2023년 12월 2일
2.ORB SLAM2 easy_profiler
업로드중.. easy profiler 사용 extractORB Frame.cc의 ExtractORB() 부분 평균 : 23.898ms
2023년 12월 5일
3.ORB SLAM2 evo
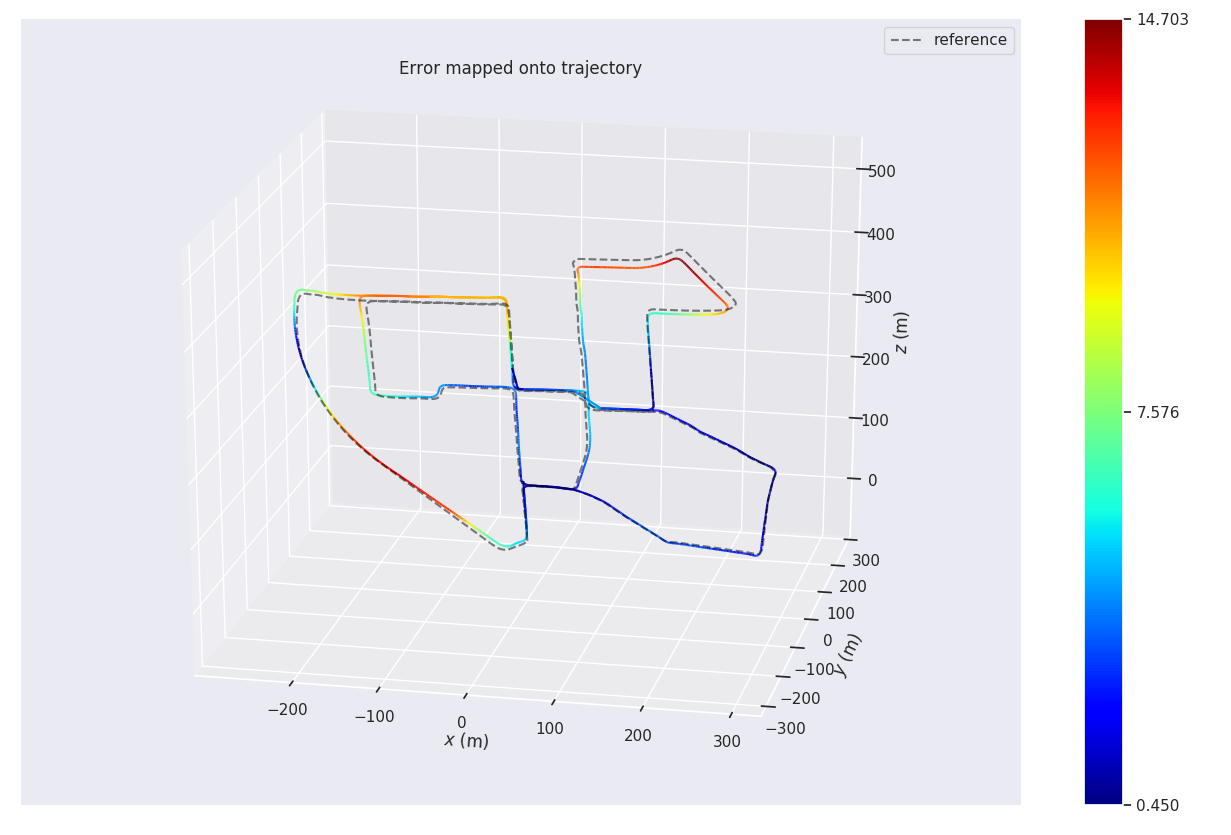
evo 설치 python 2.7에서 설치
2023년 12월 6일
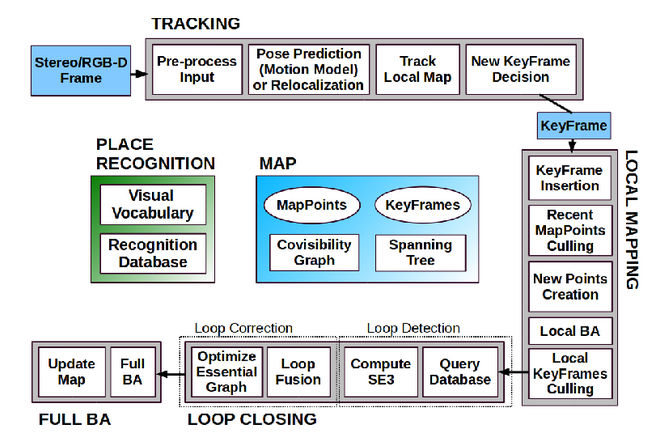
4.ORB SLAM2 코드 분석

mono_kitii.cc 1. 이미지 불러오기 LoadImages() 2. SLAM system 생성 (MONOCULAR) ORB_SLAM2::System SLAM() → ** 3. main loop (이미지 수만큼 반복) imread 현재 시간 t1 기록
2023년 12월 7일