https://github.com/MichaelGrupp/evo
https://taeyoung96.github.io/slamtip/evo_tool/
evo 설치
- python 2.7에서 설치
$ pip install evo --upgrade --no-binary evo
$ sudo apt install python-tk$ git clone https://github.com/MichaelGrupp/evo.gitevo 실행
- gt data를 tum 파일로 만들기
$ python ../evo/contrib/kitti_poses_and_timestamps_to_trajectory.py ./dataset/gt/poses/00.txt ./dataset/sequences/00/times.txt gt.txtgt와 비교하기
-as: gt와 scale 맞추기
$ evo_ape tum gt.txt KeyFrameTrajectory.txt -vap -as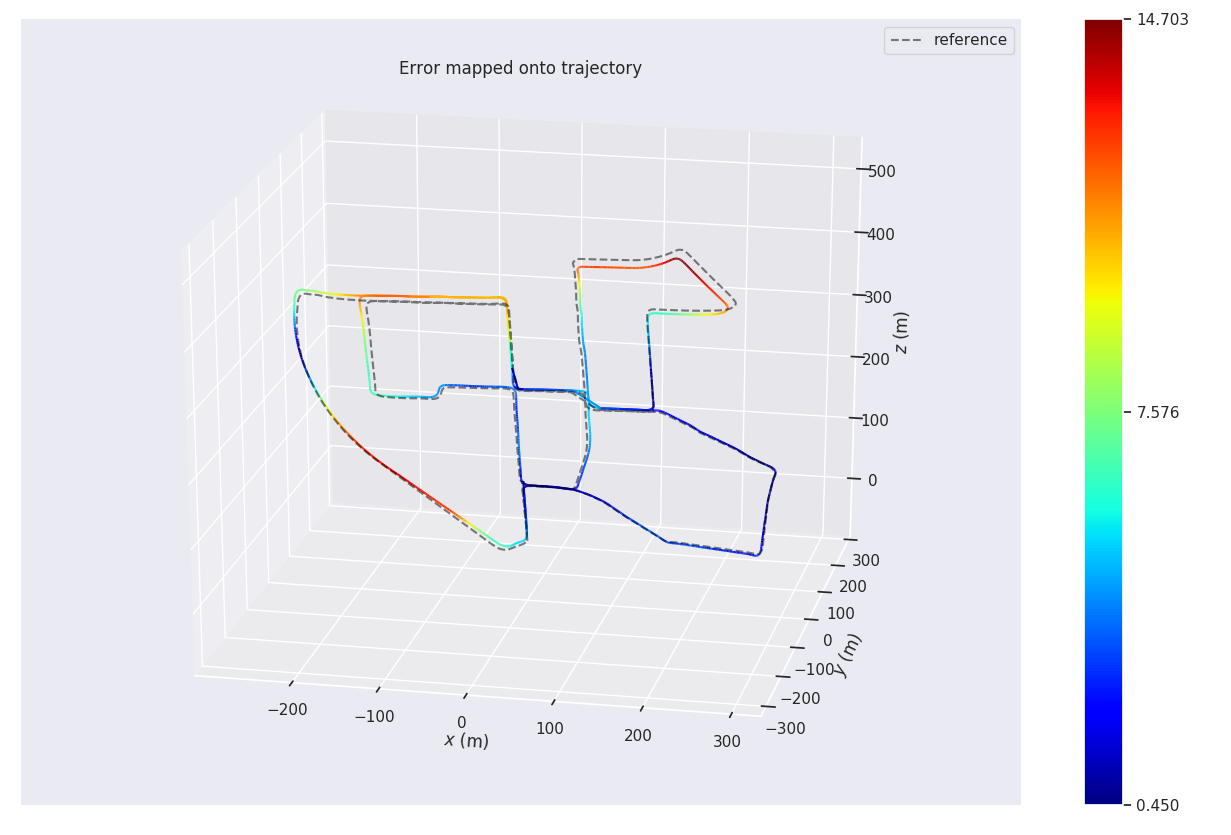
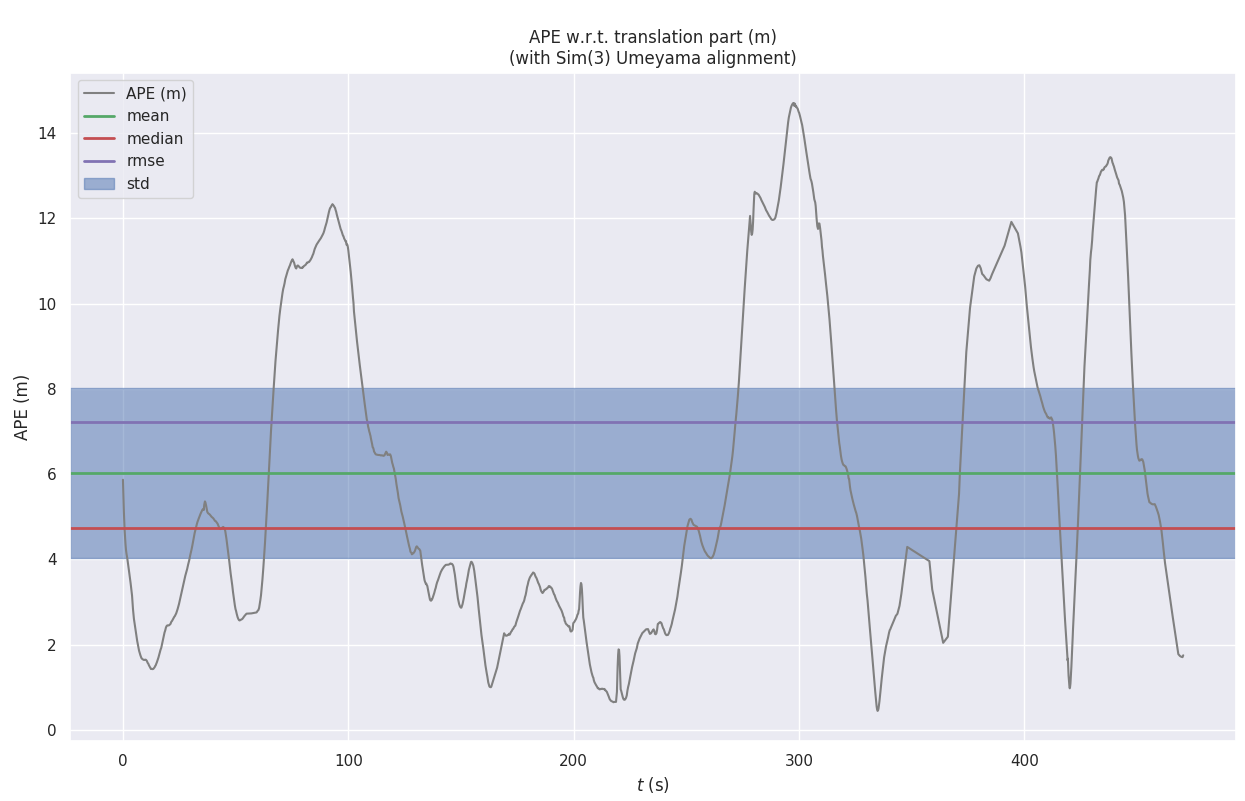
- mean : 전체 통계, total을 볼때는 mean으로 보는 것, 작은게 좋다
- median : 튀는 값을 제외하고 볼때, 작은게 좋다
- rmse : 보통 mean, median 보다 높은데 그 이유는 튀는 것에 대한 영향이 더 많다. 1차 확인할 때 rmse로 확인
- std : 안정성 확인할 때 사용 (아마 3σ)
- APE
- 데이터와 비교하면서 증가할 때 어떤 상황인지 확인하면 좋다
- 0 ~ 2 범위에 있는게 이상적
- 회전할 때 보통 에러가 많이 난다. 또는 다른 차가 있을 때
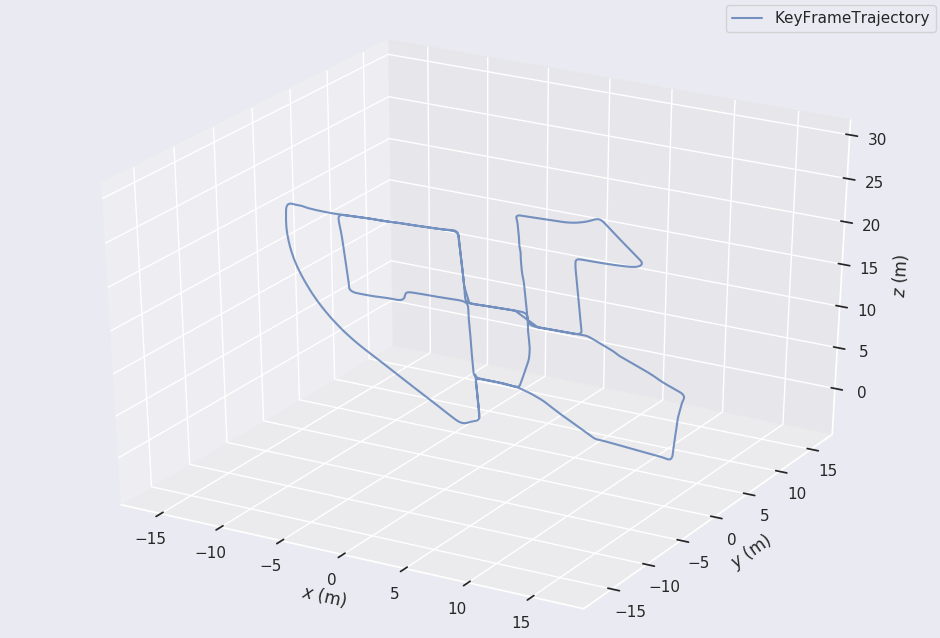
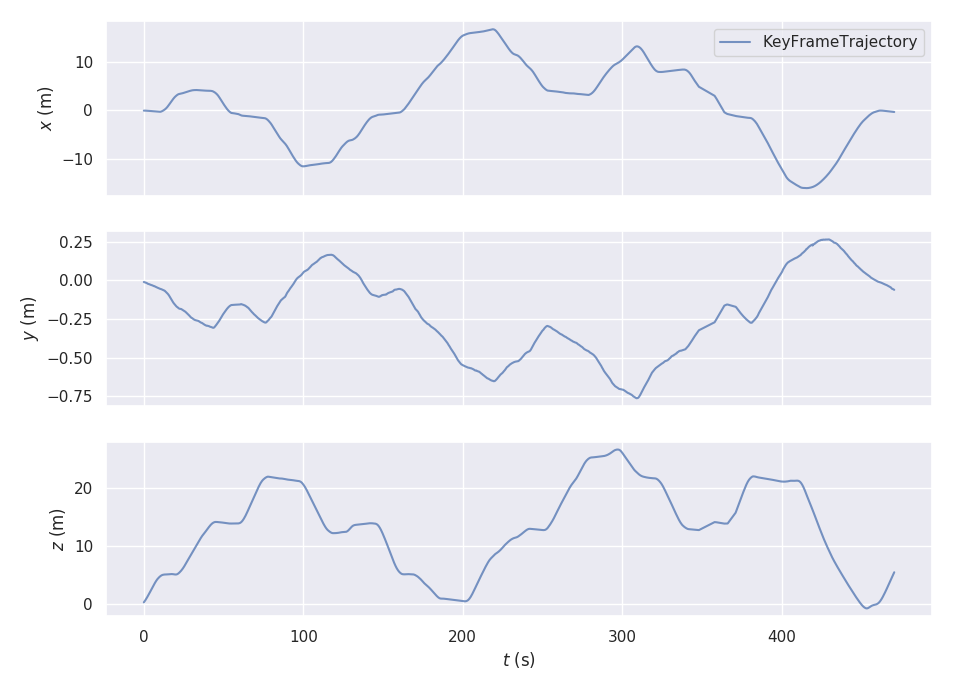
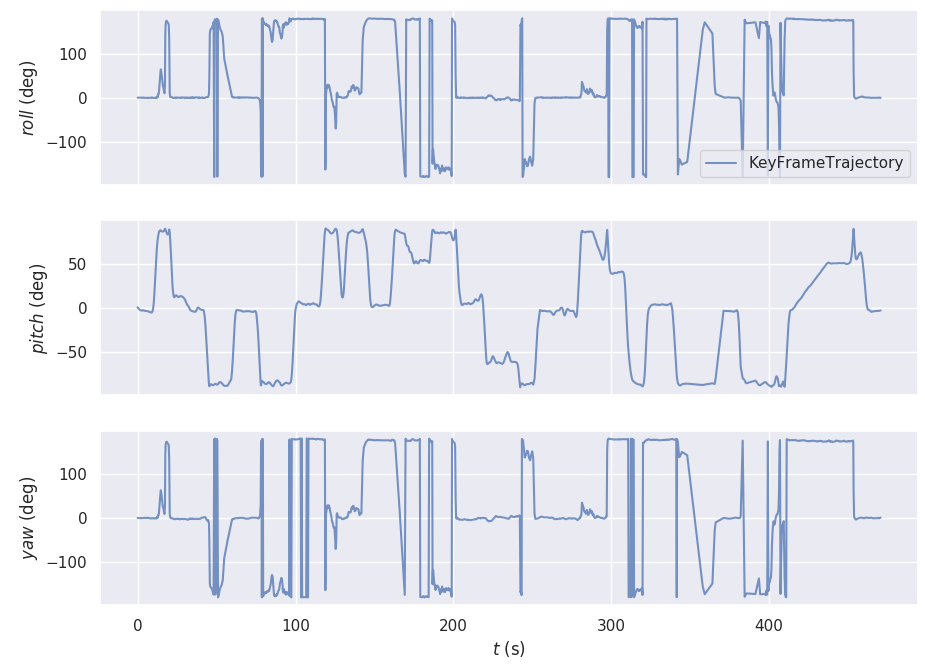
$ evo_traj tum KeyFrameTrajectory.txt --ref=gt.txt -p -as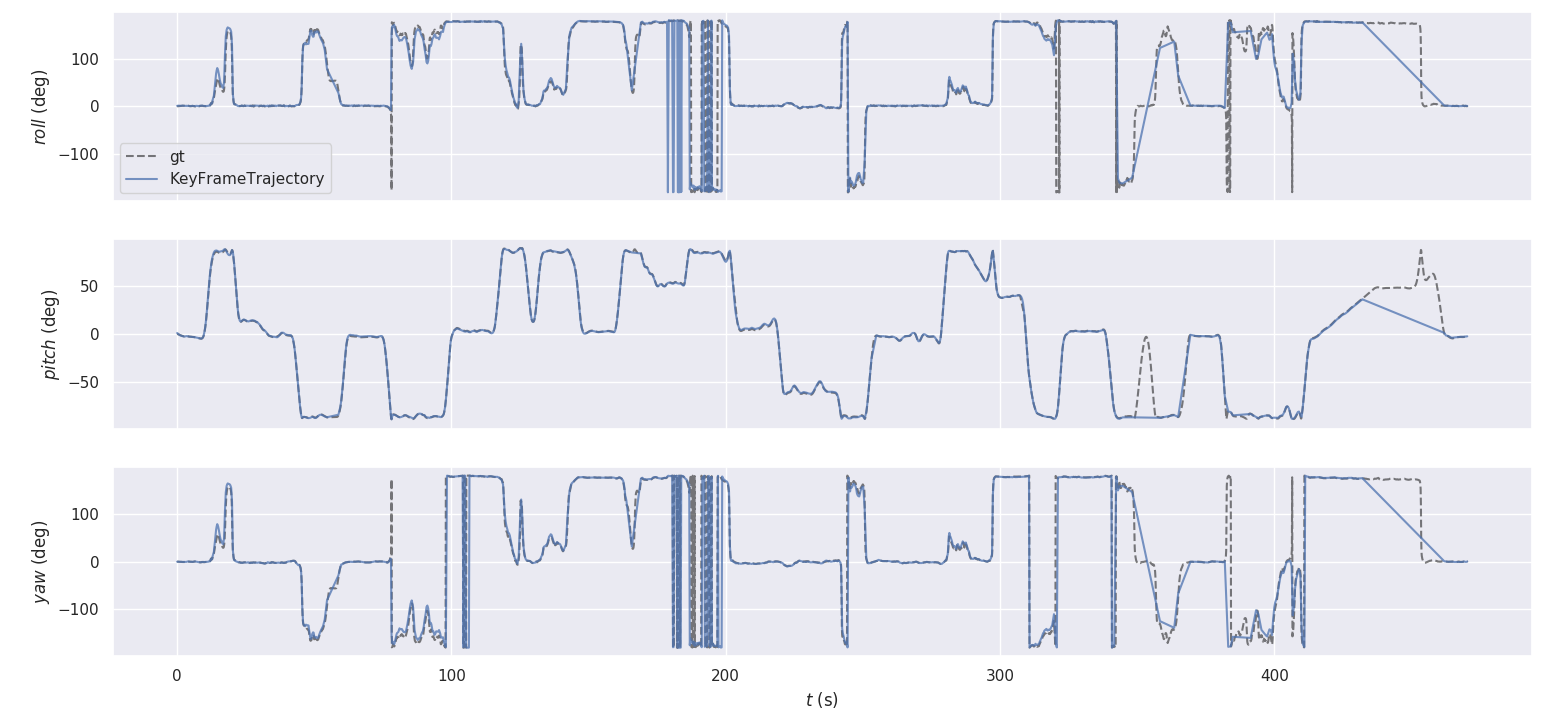
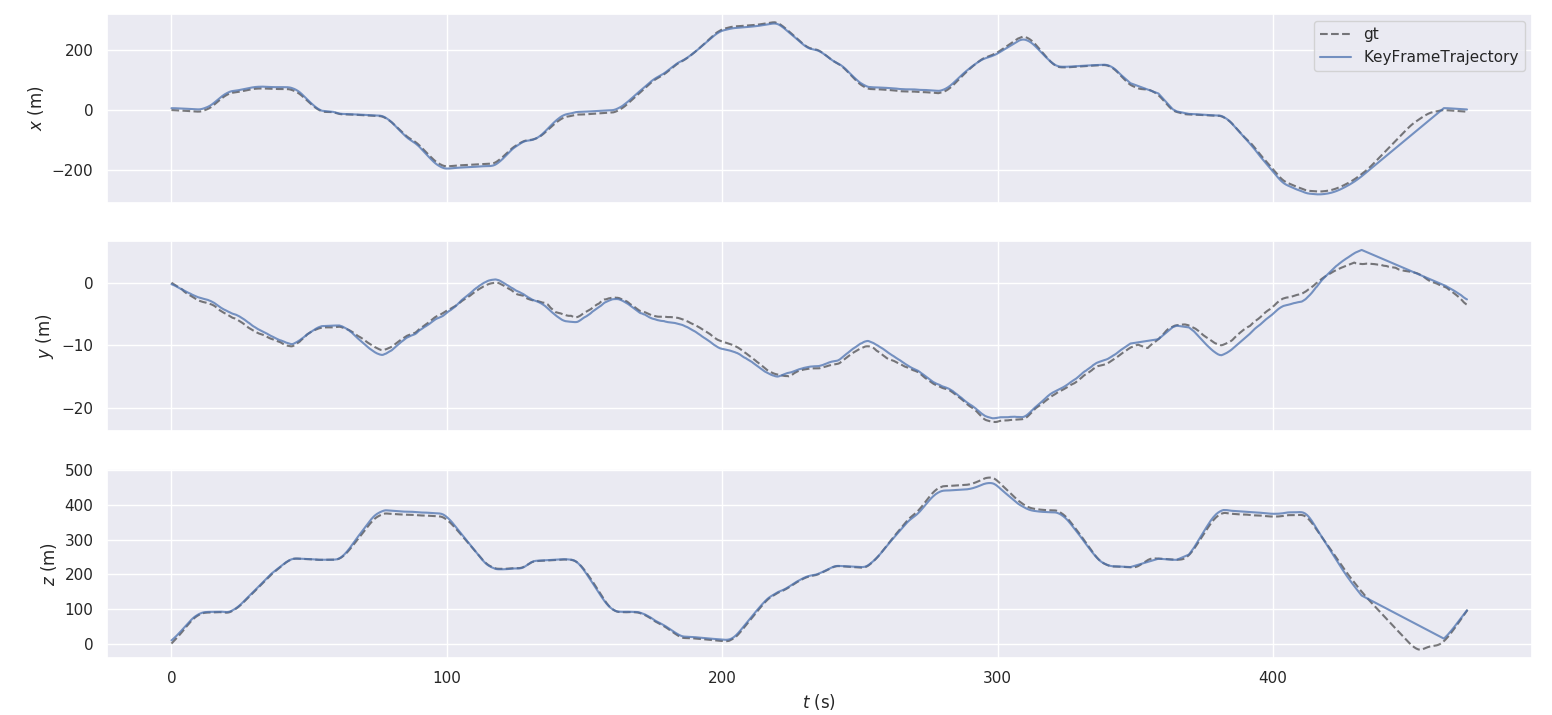
Trajector 결과를 시각화
$ evo_traj tum KeyFrameTrajectory.txt -p