
- 전체보기(33)
- ROS(3)
- C(3)
- linux(3)
- 데브코스(2)
- unix(2)
- 자율주행(2)
- 백준(2)
- 프로그래머스(2)
- Localization(2)
- 자율주행 단계(1)
- SLAM(1)
- Object Detection(1)
- push(1)
- ubuntu(1)
- Autoware(1)
- GitLab(1)
- 고정밀 지도(1)
- roslaunch(1)
- launch(1)
- gnu(1)
- Global Path Planning(1)
- reserve()(1)
- mapping(1)
- 유닉스(1)
- GCC(1)
- 후기(1)
- HD Map(1)
- C/C++(1)
- stl(1)
- filter(1)
- String(1)
- commit(1)
- shrink_to_fit()(1)
- Veichle Control(1)
- Minix(1)
- AI(1)
- 국비지원(1)
- github(1)
- c언어(1)
- resize(1)
- 리눅스(1)
- 깃허브(1)
- Behavior Selector(1)
- Local Path Planning(1)
- add(1)
- git(1)
- Local Path Following(1)
- Object Tracking(1)
- package(1)
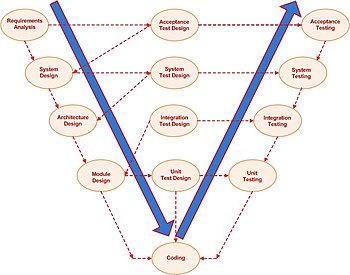
Automotive V-Model
V-Model 혹은 V-Cycle이라고 불린다. V 모델은 소프트웨어 개발 프로세스로 폭포수 모델의 확장된 형태 중 하나이다. 말 그대로 V자 형태로 개발이 진행되며 검증과 유효화 검사로 나뉘게 된다. 이 프로세스는 자동차 분야 뿐 아니라 전체적인 개발 진행 과정에서
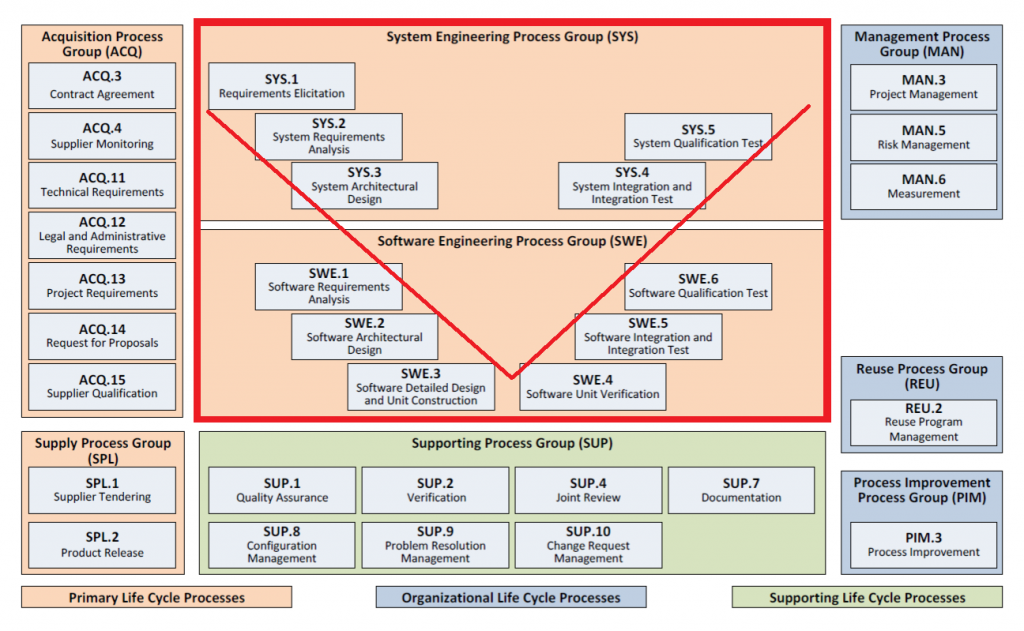
ISO 26262 & ASPICE
자동차에 대해 공부를 시작하면서 여러 키워드들을 접하기 시작하고 각각의 관계에 대해서 정리가 어느정도 되기 시작할 즈음 글을 작성한다. 개인적으로 공부하고 적은 내용을 정리해놨기 때문에 틀린 부분이 있을 수도 있다는 점을 참고하면 좋겠다. ISO 26262 아니 I
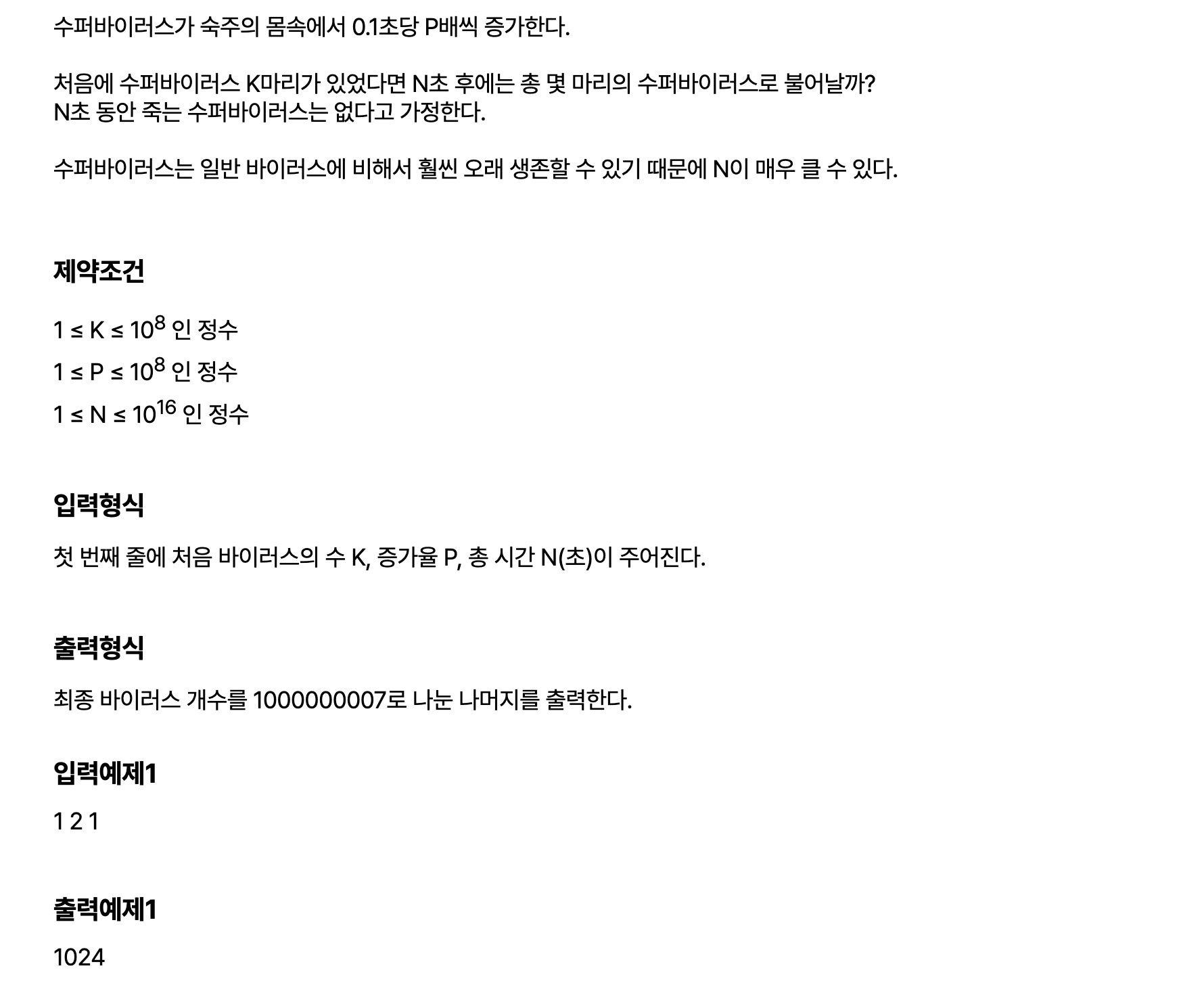
[c/c++] Softeer 수퍼바이러스 Lv3
현대오토에버 코딩테스트 대비 오랜만에 감을 살리려고 처음으로 소프티어에 있는 문제들을 풀어봤다 대체로 Lv3 정도의 난이도가 나온다고해서 나와있는 문제들은 한번 다 풀어보려고 한다.문제들이 대체로 어렵진 않은 것 같은데 정확한 설명이 부족하고 2프로 아쉬운느낌..?그래
내가 보려고 만든 C++ 정리
결과반올림 전용 round 함수가 있지만 c++ 11 버전부터 지원하기 때문에반올림하려는 수에 0.5를 더해 floor 내림 함수를 이용해서 반올림하는 습관을 키우자문제에서 간혹가다가 소수점 n번째에서 반올림하거나 올림, 내림하는 문제가 있다. ceil, floor,
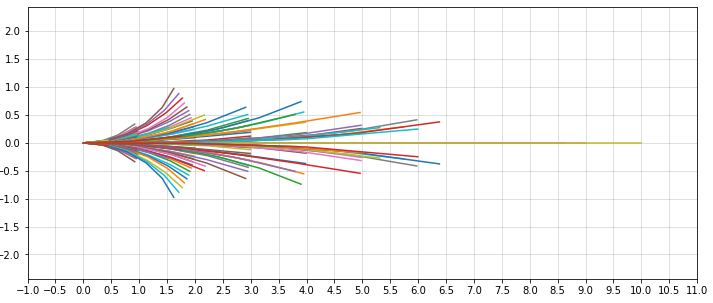
Dubins Path Algorithm
Dubins Path 알고리즘은 로봇이나 차량과 같은 이동체가 제한된 반경 내에서 움직일 때 최적의 경로를 계획하는 알고리즘이동체의 회전 반경과 가능한 직진 거리의 제약 조건을 고려해 경로를 생성한다로봇이 갈 수 있는 경로를 미리 계산(offline)미리 계산된 경로를

SLAM의 종류
visual 정보를 사용하는 SLAM장점저렴한 센서를 사용센서의 성능을 조절하기 쉬움(ex 렌즈교체 - 시야각, 초점 조절, 노출 시간)이미지 기반 딥러닝 적용 가능 - Object detection / segmentation이미지로 사람이 이해하기 쉬운 시각화 기능단

Localization을 위한 센서
Proprioceptive sensors 자기 자신의 움직임을 감지하는 센서 IMU Intertial measurement unit Linear acclerator(선형 가속도 측정)센서와 Angular gyroscope(각속도 측정) 센서가 혼합된 센서 Sprin
OpenCV_2)
OS support : Window, Linux, MacOS, iOS, Android Language : C, C++, Java, Python OpenCV가 동작하기 위해선 소스 형태 File 헤더 소스 File 사전에 학습된 사물인식 설정File 이진형태 file
Filter
자율주행 분야에서 필터(filter)는 주로 센서 데이터를 처리하고 차량 상태를 추정하는데 사용된다. 센서 데이터는 종종 잡음이나 오차가 있으며 필터는 이러한 데이터에서 원하는 정보를 추출하고 불확실성을 줄이는데 도움을 준다현재 상태를 추정하기 위해 이전 시점의 상태
Coordinate State Space & Modeling
Coordinate State Space 좌표 상태 공간(Coordinate State Space)은 자율주행 시스템에 사용되는 공간 표현 방식이다 이 공간에서 다양한 요소들이 동작하며, 그 요소들의 상태와 위치를 파악하고 추적하는 데 사용된다 Coordinate s

ROS_6) XYcar(자이카) 개념
자이카는 국내 회사 자이트론에서 제작한 자율주행 모형차이다Xycar-D, Xycar-X, Xycar-C 모델이 있음리눅스가 설치되어있다(16.04 or 18.04 버전)ROS로 구성되어있다. 각종 센서와 모터제어를 한다장치별 제어를 위해 위와 같은 ROS Package

OpenCV_1) OpenCV와 Mat클래스
영상 처리와 컴퓨터 비전을 위한 오픈 소스 라이브러리(BSD 라이선스)C, C++, Python, Java 등 여러 언어에서 사용 가능대부분의 운영체제 지원(Linux, Windows, Mac OS, Android)이미지와 비디오 처리, 객체 추적, 얼굴 인식, 모션

ROS_5) 노드 간 N:N 통신 주고받기 & 나만의 메시지 만들기
통신 구조Directory 구조teacher.pystudent.pyLaunch 파일 작성 및 실행통신 구조코드는 위의 코드와 똑같이 해주면 되는데 하나의 코드로 여러 개의 노드를 연결하기 위해선 각 노드의 이름이 달라야 한다 따라서노드의 init 함수에서 anonym

ROS_4) ROS 기본 예제
~/xycar_ws/src/my_pkg1/src 위치에 pub.py라는 이름으로 생성해야함생성 후 파이썬 코드를 실행시키기 위해 실행권한을 부여해줘야한다터미널 1roscore 실행터미널 2turtlesim 노드 실행터미널 3pub.py 실행터미널 4rqt_graph 실

ROS_3) ROS 세팅 & 기본 구조
다음과 같은 Workspace 구조가 만들어 진다catkin_make 작업을 통해 패키지를 빌드한다. 필요한 패키지들을 알아서 찾아 설치하고 바이너리 파일을 생성해 노드를 만들 수 있도록 세팅해준다. 밥먹기 전에 수저 물 놓은 세팅 작업같은 것bash 파일 맨 뒤에다가
자율주행 자동차 기술_2
오픈 소스로 제공되는 자율주행차량 소프트웨어 플랫폼자율주행차량 개발에 필요한 기능과 알고리즘을 제공하며 연구자와 엔지니어들이 자율주행 기술을 개발하고 실험하는 데 사용SAE-레벨2실차에 바로 적용 가능한 솔루션30개 이상의 국가에서 사용100개 이상의 회사들 사용20개
자율주행 자동차 기술_1
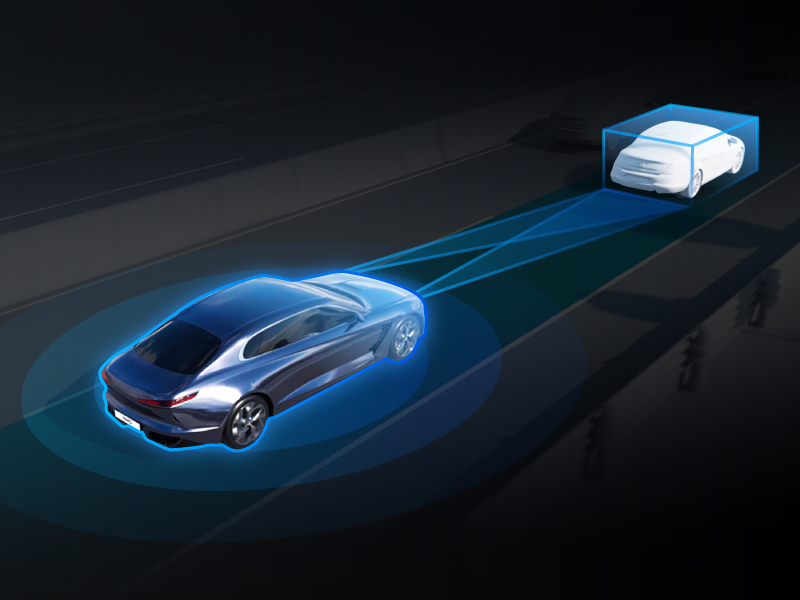
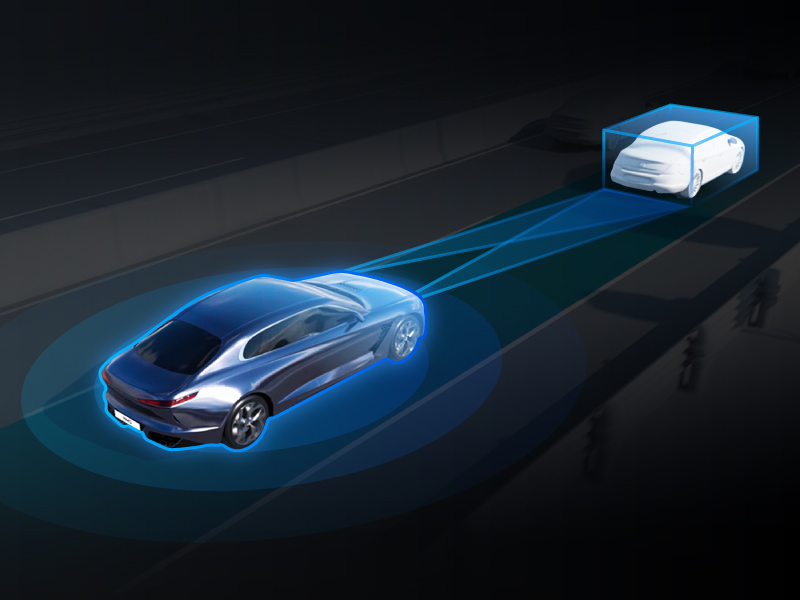
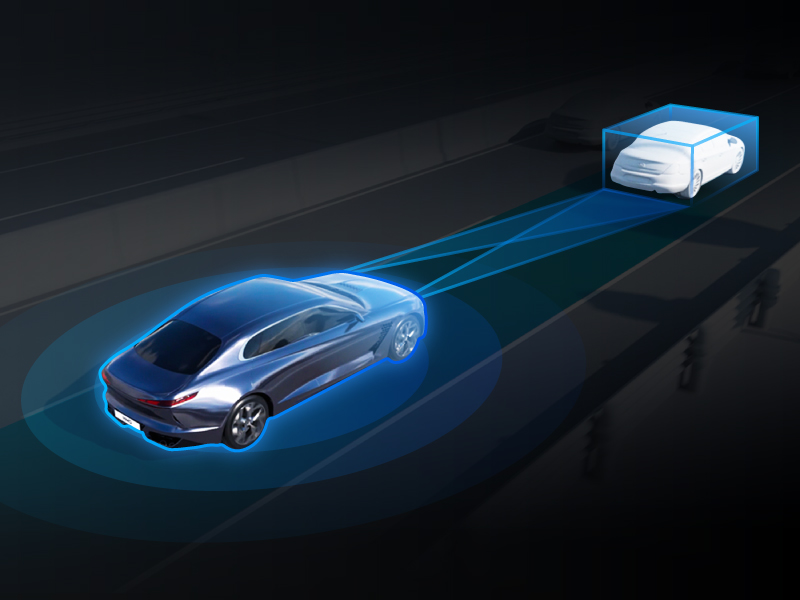
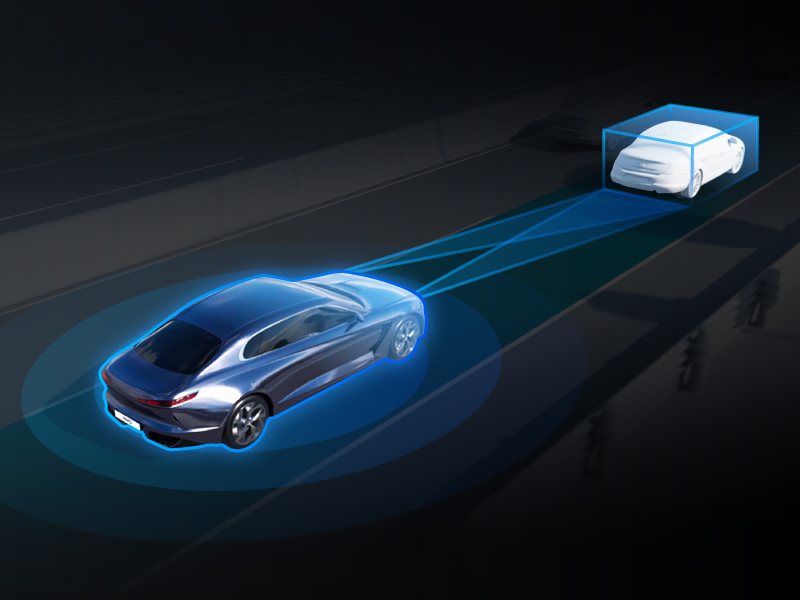
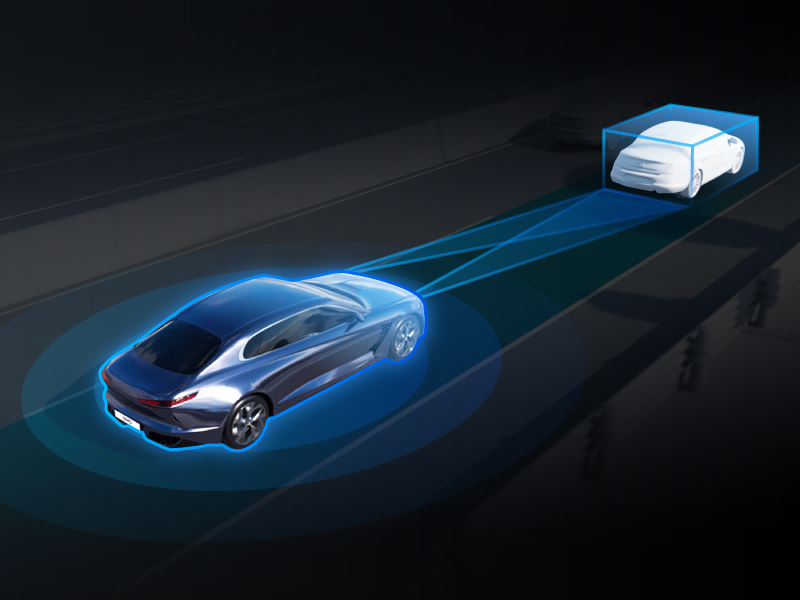
로봇이나 자율주행차량이 주어진 공간(Map)의 어디에 있는지 예측하는 방법위치를 측정해서 확률을 업데이트하고 움직이는 과정의 반복정밀지도와 연동하여 차량의 현재 위치를 파악한다라이다, 카메라를 이용목적지까지의 경로 찾기중간 목적지 또는 최종 목적지까지의 경로 교차로에서
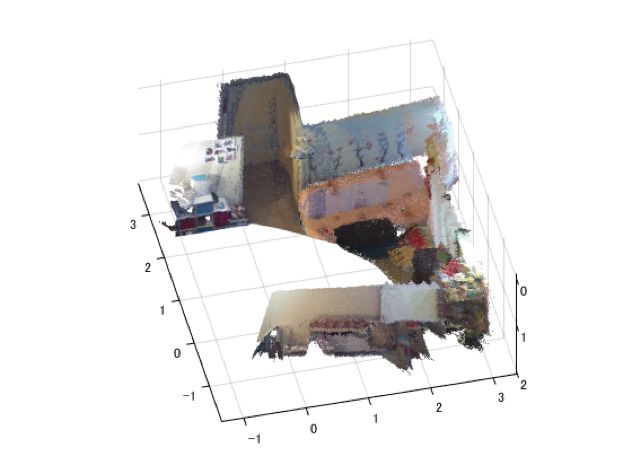
자율주행 자동차 개념
운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차를 말한다미국 자동차기술학회(SAE)는 자동 주행 자동차 기술을 6단계로 구분했다출처 도로교통부출처 현대자동차출처 현대자동차HD Map(High Definition Map)은 주변환경 정보가 3D로 구현된

[C/C++] stringstream 사용법
C++의 표준 라이브러리의 일부로 'sstream' 헤더 파일에 정의 되어있다. 문자열 스트림으로 작동하며, 일반적인 입출력 스트림처럼 사용할 수 있다.'stringstream'은 문자열을 읽거나 쓸 때 편리한 방법을 제공하고 문자열로부터 값을 추출하거나 문자열에 값을