너무 길어질 것 같아 1과 2로 나누어 정리하겠습니다.
(1) 링크 : https://velog.io/@ym980118/딥러닝-파이토치로-딥러닝-구현-데이터-전처리-이미지-시각화-모델-구현
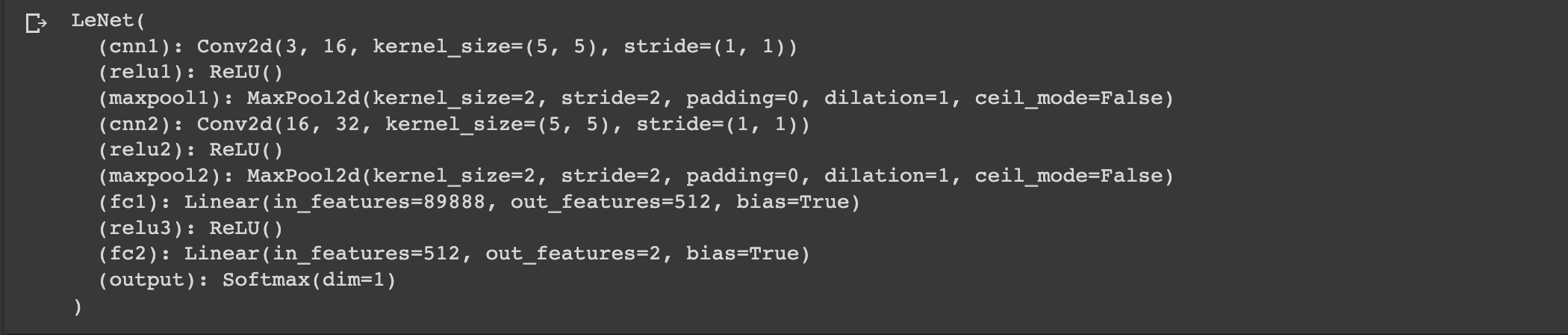
1. 모델 생성
class LeNet(nn.Module):
def __init__(self):
super(LeNet,self).__init__()
self.cnn1 = nn.Conv2d(3, 16, 5)
self.relu1 = nn.ReLU()
self.maxpool1 = nn.MaxPool2d(2)
self.cnn2 = nn.Conv2d(16,32, 5)
self.relu2 = nn.ReLU()
self.maxpool2 = nn.MaxPool2d(2)
self.fc1 = nn.Linear(32*53*53,512)
self.relu3 = nn.ReLU()
self.fc2 = nn.Linear(512,2)
self.output = nn.Softmax(dim=1)
def forward(self,x):
out = self.cnn1(x)
out = self.relu1(out)
out = self.maxpool1(out)
out = self.cnn2(out)
out = self.relu2(out)
out = self.maxpool2(out)
out = out.view(out.size(0),-1)
out = self.fc1(out)
out = self.relu3(out)
out = self.fc2(out)
out = self.output(out)
return out
model = LeNet()
model = model.to(device)
model- LeNet 사용 (모델 확인)
torchsummary를 통해 직관적으로 모델 확인 가능
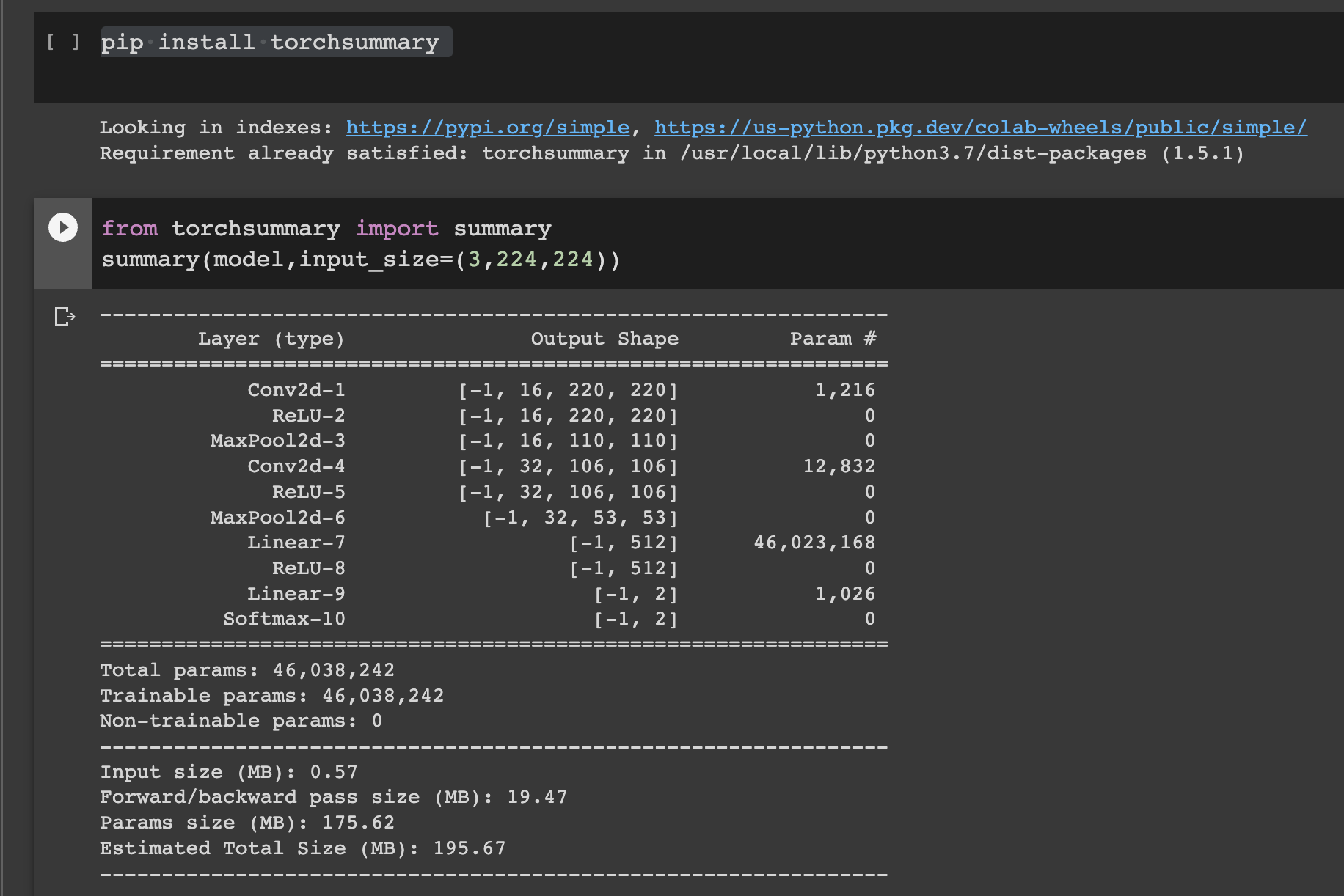
파라미터 수 확인
def count_parameters(model): return sum(p.numel() for p in model.parameters() if p.require_grad)
2. 손실함수 & 옵티마이저 설정
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)3. 모델 훈련
def train_model(model, dataloader_dict, criterion, optimizer, num_epoch):
since = time.time()
best_acc=0.0
for epoch in range(num_epoch):
print("{} / {}".format(epoch, num_epoch))
print("-"*20)
for phase in ['train','val']:
if phase == 'train':
model.train()
else:
model.eval()
epoch_loss = 0.0
epoch_corrects = 0.0
for inputs, labels in tqdm(dataloader_dict[phase]):
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad()
with torch.set_grad_enabled(phase=='train'):
outputs = model(inputs)
_,preds = torch.max(outputs,1)
loss = criterion(outputs, labels)
if phase == 'train':
loss.backward()
optimizer.step()
epoch_loss += loss.item() * inputs.size(0)
epoch_corrects += torch.sum(preds==labels.data)
epoch_loss = epoch_loss / len(dataloader_dict[phase].dataset)
epoch_acc = epoch_corrects.double() / len(dataloader_dict[phase].dataset)
print("{} LOSS : {:.4f} ACC: {:.4f}".format(phase, epoch_loss, epoch_acc))
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = model.state_dict()
time_elapsed = time.time() - since
print('Training Complete {}m {}s'.format(time_elapsed //60, time_elapsed % 60))
print('Best val ACC : {:.4f}'.format(best_acc))
return model
