
20211015
1. 비지도 학습(Unsupervised Learning)
training data로 정답(label)이 없는 데이터로 학습.
데이터셋의 특징(feature) 및 패턴 기반으로 결론 도출
-
비지도 학습의 예시
-
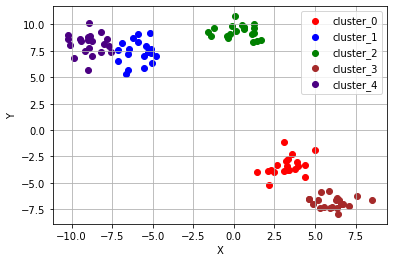
군집화(클러스터링, clustering)
-
명확한 분류 기준이 없는 상황에서 데이터를 분석하여 유사한 데이터끼리 묶는 작업
-
K-means, DBSCAN 알고리즘이 대표적
-
-
차원 축소(dimensionality reduction)
- PCA(Principal Component Analysis), T-SNE이 대표적
-
2. 클러스터링 - K-means
k 값이 주어지면 데이터들을 k 개의 클러스터로 묶는 알고리즘
-
임의로 지정한 k개의 중심점이 새로운 label 역할
-
유클리드 거리(Eucledian distance)
- L2 Distance
- 피타고라스 정리를 응용하여 계산한 좌표축 사이의 두 점 사이의 직선거리
K-mean 알고리즘의 순서
-
클러스터의 수(K) 결정
-
K개의 중심점(centroid)을 선정
-
각 점들과 모든 중심점 간의 유클리드 거리 계산 → 가장 가까운 거리를 가지는 중심점의 클러스터에 포함시킴
-
K개의 클러스터의 중심점 재조정
-
각 클러스터에 속하는 모든 점들의 평균값 → 해당 클러스터 다음 iteration 중심점
-
재조정된 중심점 기반 각 점과의 유클리드 거리 재계산 → 클러스터 재배정
-
직전 2개의 과정을 반복 (반복 횟수는 사용자가 설정)

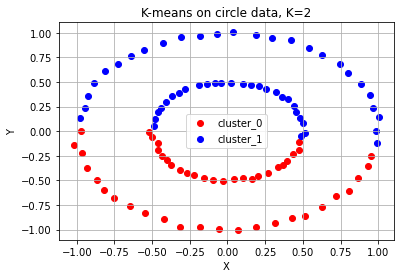
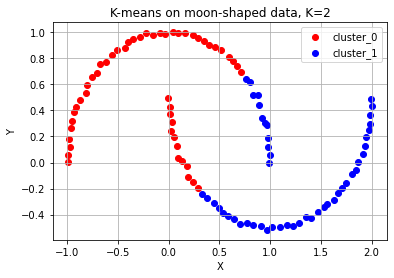
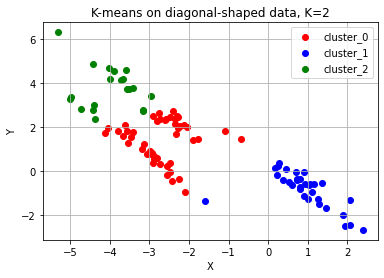
K-means 알고리즘이 부적합한 군집화 (예시 有)
- 군집의 개수(K 값)를 예측하기 어려운 경우(K 값를 미리 지정해야 하기 때문에)
- 데이터의 분포에 따라 유클리드 거리가 멀면서 밀접하게 연관되어 있는 데이터들의 군집화
(유클리드 거리가 가까운 데이터끼리 군집이 형성되기 때문에 )
- 원형으로 분포되어 있는 데이터: 각 원으로 분류하지 않고 중심점을 기준으로 군집화 함
- 초승달 모양의 데이터: 두 개의 달 형태로 군집화 하지 않음
- 3개의 대각선으로 나열된 데이터
3. 클러스터링 - DBSCAN
DBSCAN(Density Based Spatial Clustering of Applications with Noise) 알고리즘: 밀도(density) 기반의 군집 알고리즘
-
군집의 개수를 미리 지정할 필요 없음
-
몰려 있는 그룹을 군집화하는 방식을 사용 → 불특정한 형태의 군집을 찾는 것이 가능함
-
클러스터가 최초의 임의의 점 하나로부터 점점 퍼져나감
- 기준: 데이터의 밀도 (일정 반경 안의 데이터의 개수)
-
epsilon: 클러스터 반경 → 미리 지정해야 함 -
minPts: 클러스터 내 개체의 최솟값 → 미리 지정해야 함 -
core point: epsilon 내에 minPts 개 이상의 점이 존재하는 중심점 -
border point: 군집에 속하는 점 -
noise point: 군집에 속하지 않는 점 -
데이터의 양이 많아질수록 수행 시간이 급격히 증가 (적은 데이터에서는 K-mean이 더 길다)
DBSCAN 순서
-
임의의 점 p 설정 후 클러스터의 반경(elipson) 안에 포함되어 있는 점들의 개수 세기
-
만약 그 원에 minPts 이상의 점이 포함되어 있으면, 해당 점 p를 core point로 하고 포함된 점들로 하나의 클러스터로 정함
-
반대로 그 원에 minPts 개 미만의 점이 포함되어 있으면 그냥 넘어감
-
모든 점에 대해 위 과정 반복
-
점 p가 core point가 되고 이 점이 기존의 클러스터(p를 core point로 하는)에 속한다면, 두 개의 클러스터는 연결되어 있다고 판단 → 하나의 클러스터로 합침
-
클러스팅 과정 후 core point지만 클러스터에 속하지 못하는 점이 있으면 noise point로 간주.
-
특정 군집에는 속하지만 core point가 아닌 점 → border point
4. 차원 축소 - PCA
주성분분석(PCA): 데이터 분포의 주성분을 찾아주는 방법.
데이터의 고유한 물리적 정보량을 보존.
주성분: 데이터의 분산이 가장 큰 방향벡터
-
차원 축소의 역할: 많은 정보 속에서 더 중요한 요소가 무엇인지를 구분 -
데이터의 분산을 최대로 보존
-
서로 직교하는 기저들을 찾아 고차원 공간을 저차원 공간으로 사영
- 직교(orthogonal)
- 기저(basis): 새로운 좌표계 역할을 할 수 있는 벡터의 모음
- 사영(projection): 데이터를 X-Y, Y-Z 좌표축에 사영했다 → Z, X 좌표축을 무시했다는 뜻
- 선형결합(linear combination)
-
기존의 feature를 선형 결합(linear combination)하는 방식
-
가장 중요한 기저 → 주성분(Principal Component) 방향 or pc축
-
가장 분산이 길게 나오는 기저 방향을 찾아 그 방향의 기저만 남기고, 덜 중요한 기저 방향을 삭제하는 방식의 차원축소
-
feature 간 상관관계가 있고 이를 추릴 필요가 있을 때 유용
5. 차원축소 - T-SNE
T-SNE(T-Stochastic Neighbor Embedding): 기존 차원과 차원 축소된 공간에서도 변치않고 가깝게 거리가 유지되는 것을 목표로 함.
데이터들 간의 상대적 거리를 보존.
시각화에 많이 쓰임.
-
분류기의 Feature Extractor 모델이 카테고리 간 분류 경계선을 잘 유지하고 있는지를 확인하는 용도로도 사용
-
T-SNE는 정보 손실량에 주목하지 않음
-
저차원 축이 아무런 물리적 의미 X
-
시각화에 유리
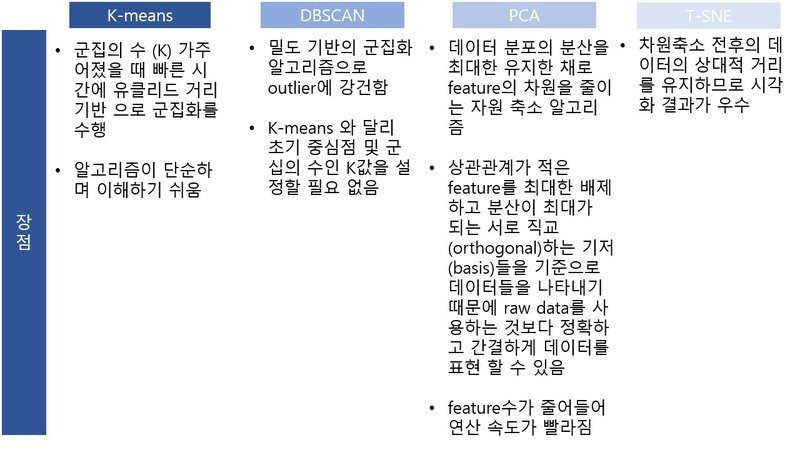
6. 요약
출처: AIFFEL Fundamentals_ssac2 17. 비지도 학습
참고 자료
