
1. 차량 센서 관점에서의 판단 기술 심화
1) 센서 특성 및 원리
카 라 레
2) 센서 융합의 필요성
주행상황에 따른 신뢰도가 변할 수 있고, 센서별 장단점이 명확하기에 센서 융합은 반드시 필요하다
- High Level Fusion : 하나 하나 인식하고, 최종적으로 판단 영역에서 인식 결과 융합 // 구현이 용이!
- Low Level Fusion : 센서 정보를 모아서 한번에 종합적으로 인식 수행 // 성능 극대화 가능
2. 도로 인프라 관점에서의 판단 기술 심화
1) 거시적인 관점에서의 자율주행
- 자율주행 자동차 시스템 및 운영제어 (SW, HW)
- 소프트웨어 플랫폼 (autosar~)
- 보안체계
- 통신 기술
- 클라우드 및 디지털 인프라 클라우드 및 인프라
2) 거시적인 관점에서의 자율주행 항목별 이해
- 보안 체계 : 차랑 내부적으로는 주행의 안전과 관련된 부분은 별도 처리, 주행 관련해서는 해킹을 못하도록 구조화
- 통신 기술 : 모든 것들이 연결되어 정보의 양방향 공유
- 클라우드 및 디지털 인프라 : 지속적으로 차량센서를 통해서 클라우드에 업로드, 클라우드는 정밀지도 갱신
3. Rule-Based Approach 기반 판단 기술 심화
1) Rule-Based Approach의 개념과 상황별 예시
- RBDM : 규칙에 따라서 결과값을 정하는 것.
- 간단한 고속도로 환경, 복잡한 도심환경 등에서 다양하게 진행 가능하지만, 복잡해지는 경우 input이 많아져서 어려움이 있음
2) RB의 특성에 따른 적합한 대상 환경
입력변수 정의 >> 변수들로 규칙 설정 >> 규칙에 따른 행동 정의
현실 세계에서는 입력의 정보가 많기 때문에, 규칙이 증가하며, 규칙과 결과 사이의 관계가 불명확한 경우들이 존재하여 AB를 고려하는 것도 나쁘지 않다.
4. AI-Based Approach 기반 판단 기술 심화
1) AB의 개념과 상황별 예시
주행 데이터를 바탕으로 데이터 학습, 판단
간단한 고속도로에서 거리 유지를 위해 일정 거리에서 리워드를 계속해서 제공
복잡한 환경에서는 수많은 입력정보에 의한 방대한 데이터가 필요함
2) 데이터와 인공지능 모델 성능 간의 상관관계
모델은 데이터가 필요하며 데이터를 많이 학습시키면 성능이 향상될 가능성이 증가된다. 최근 데이터 증폭 효과를 만드는 연구가 진행중이다.
5. 차선 유지 주행 판단 심화
1) 차선 유지 주행 판단 개념과 기술 원리
- ADAS기능 : LKAS(Lane Keepiung Assist System) 기능을 포함하는 차선 유지 보조 시스템이다
- 기술의 원리 : 센서로 부터 외부 환경 정보중 자차가 달리는 차선의 정보와 전방 차량의 거리 속도 정보를 실시간으로 획득하여 차선 유지에 관한 주행 판단을 진행
2) 현재 차선 유지 보조 시스템 기술 원리와 개선 방안
- 현재 시스템의 원리
카메라 : 차선 정보 인식 >> 중앙 주행 여부 판단
레이더: 넓은 거리 측정, 전방 차량의 거리 속도 인식
보조시스템: 자율 주행이 아닌 운전 보조 시스템임! - 보조 시스템이 자율주행이 되기 위한 개선 방안
라이다 센서 사용 // V2V활용
6. 차선 변경/추월 주행 판단 심화
1) 차선 변경을 위한 주행 판단 개념ㅇ과 기술 원리
- 차선 유지 행위 다음으로 가장 많이 실행되는 행동으로 전방차량의 서행 혹은 정차로 인해서 차선을 변경하게 된다.
- 이를 위해서 목표 차선 전방 차량, 후방 차량 및 다른 차량들의 전체적인 거리 속도 측정, 차선 변경 가능 여부를 판단후 차선 변경에 필요한 속도 또한 계산.
2) 다차선 도로 차선 변경 예시와 변경 방안
- 다차선 도로 차선 변경 가능 여부는 주변차량을 360 도 센싱하여 정보를 수집해 판단한다. 주로 레이더와 라이다를 활용
- V2V 기반 통신의 정보 중복제공은 보다 안전한 자율운항을 가능하게 한다.
7.교차로/좌,우회전 주행 판단 심화
1) 교차로 좌,우회전을 위한 주행 판단 개념과 기술 원리
- 많은 동적 물체와, 여러가지 교통 신호등 및 표지판 때문에 어렵다. 다양한 정보의 우선순위를 정하여 상황별로 적절하게 사용할 수 있는지가 중요하다.
2) 교차로 좌회전 시나리오 시 V2X 기술 효용성
V2I 로서 정보를 제공하기 최적의 환경이다.
8.돌발상황/사고상황 주행 판단 심화
1) 돌발상황/ 사고상황을 위한 주행 판단의 개념
돌발 상황/ 사고상황은 난이도가 높은 시나리오중 하나로 주어지는 상황이 굉장히 다양하기 때문에 어려움. 이런 모든 상황을 대응 할 수 있는 주행 판단 알고리즘이 필요하다.
2) 돌발상황/사고상황을 위한 주행 판단 방법론
- RBDM:
정형적인 경우들에 대해서 Rule을 설정하고 나머지 모든 예시는 주행 정지 명령을 내려 대응 - ABDM:
딥러닝 모델을 학습시켜 주행상황에 대한 판단 가능 >> 이를 바탕으로 방대한 데이터를 수집한다면, 폭 넓은 경우에 대한 주행 판단이 가능한 인공지능 모델 생성 간ㅇ
9. 열악한 날씨상황 주행 판단 심화
1) 열악한 날씨 상황을 위한 주행 판단의 개념
- 운전자의 주행 특성에 따라 안정성이 심각하게 하락 가능
- 날씨가 열악한 정도에 따라 주행을 안전하게 하는 대응을 자율주행 센서를 이용해서 시스템의 날씨 판단, 안정적인 운행 가능
2) 주행 판단 방법론
-
날씨 상황 인식을 위한 3가지 방법
방법 1: 레인 센서
방법 2: 슬립 추정
방법 3: 카, 라 센서 기반 딥러닝 -
인공지능 기반 날씨 상황 인식 및 주행 판단 활용
날씨 상황에 따른 주행 행동을 다루는 딥러닝 네트워크가 필요한데, 날씨 인식, 카메라 영상 , 도로 마찰계수, 권장 속도 등을 계산한 섬세한 주행 조절 가능할것으로 예상
10. V2X 정보 기반 주행 판단 심화
1) V2X 정보 기반 주행 판단 개념
센서 기반의 인시기 기술의 정확도 한계 극복 및 항상성 문제로 중복 정보제공은 중요ㅏ다
2) V2X 통신 기반 자율주행의 한계
모든 주체들에게 통신 단말기가 있어야 하지만 불가능에 가깝기 때문에 센서 기반 인식은 반드시 필요함.
11. Fail Safe 주행 판단 심화
1) 차량에서 Fail Safe의 정의
차량 주행 중 차량 일부에 결함 혹은 고장이 발생하였을때,다른 안전장치가 작동하여 결정적인 사고나 파괴를 예방하는 장치
2) 3단계 fail safe
- Fail Passive : 엔진, 모터, 조향, 가감속 이 고장난 경우 바로 구동 중지
- Fale Active : 안전한 곳까지 가서 주행 정지. 난이도가 높은 주행 방법
- Fale Operational : 추후 보수가 유지될 때까지 주행기능 유지. 센서들의 대체 및 가장 바람직한 부분!
12. LiDAR SLAM 기반 정밀지도 생성 방법론
1) LiDAR
Light Dectection and Ranging의 약자
레이저를 쏘아서 거리를 측정하는 센서
수많은 LaserPoint 들의 집합을 의미하는 Point Caloud 데이터 확보 가능
LiDAR를 이용하여 3차원 물체 인식, 지도생성 및 자차 위치 인식이 가능하다
2) SLAM의 개념
-
SLAM 이란 : Simultaneous Localization And Mapping의 약자로 Mapping과 Localization을 동시에 한느 알고리즘
-
LiDAR SLAM : 라이다 기반 정밀지도를 만들 때 필요한 정보는 IMU, 오도메트리, GPS , 라이다 스켄 종보등이다
정보들을 활용하여 SLAM 알고리즘 기반으로 LiDAR 스캔 최적화와 차량의 정확한 위치 정보를 추저하게 되면 고정밀 라이다 지도를 생성가능하다
13. LiDAR 기반 위치인식 방법론
1) 자율주행에서의 위치인식과 GPS 종류
-
위치 인식 : Localization 기술이라고도 불리며, 자차의 위치를 정확하게 인식하는 것을 의미한다. 라이다 기반의 위치인식의 경우 고정밀 지도 상에서 자신의 위치를 라이다를 통해 비교함!
-
GPS 종류
DGPS : 1주기 300m, 1~5m 정확도
RTK-GPS : 1주기 19cm, 1~3cm 정확도
2) 라이다 기반 위치인식의 기술적 원리
- 라이다 기반의 위치인식 : Scan-matching 혹은 Map- matching이라고 불리는 방식을 이용하여 정밀지도 상에서 맵 정보와 자차의 라이다 스캔 데이터를 실시간으로 비교 자차의 위치인식 진행
- Scan Matching : 라이다 스캔을 정밀 지도에 대입하여 일치율을 계산하여 위치 역산
ICT 방식 : 실제 그대로 사용해서 Matching에 활용 >> Rotational error가 적음
NDT 방식 : 정규화를 적용, initial Pose 추정에 우리
14. Camera SLAM 기반 정밀지도 생성 방법론
1) 카메라 기반 SLAM과 라이다 기반 SLAM의 비교 분석
- 라이다 기반 : 라이다 스켄 데이터를 모아서 Point Cloud 정보로 만들어 정밀지도 생성
- 카메라 기반 : Feature 또는 Pixel 정보 추출후 정밀 지도 생성
- 전반무의 과정은 차이가 존재하지만, 후반부 SLAM의 방식은 거의 유사하다
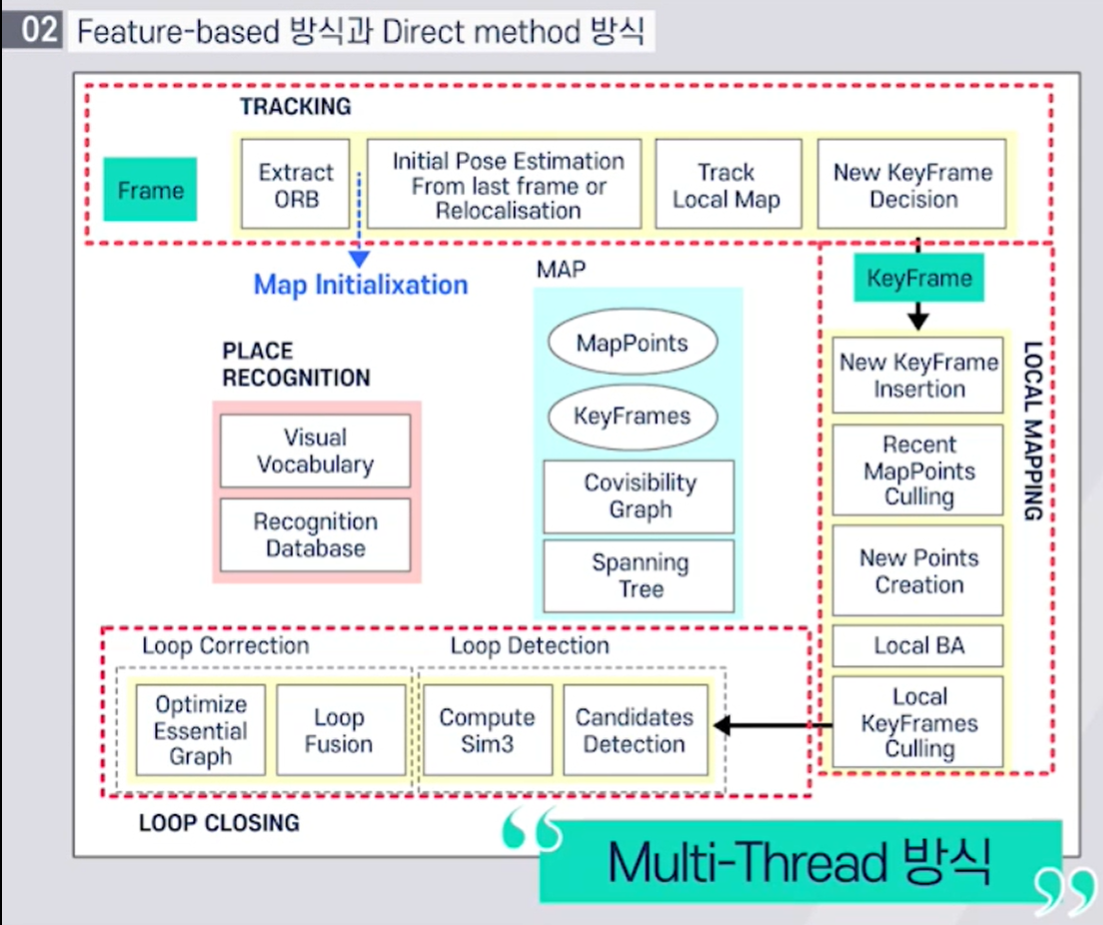
2) Feature-based 방식과 Direct Method 방식
-
Feature-based 방식 : 대표적인 예시로는 ORB-SLAM이 있음. SLAM을 적용하기 위해 Feture를 추출해야함!
-
Direct method 방식 : 대표적인 알고리즘으로는 LSD-SLAM , 입력 영상이 들어오면 Feature 추출기반 matching 과정이 없고, 대신 입력 영상의 edge와 같은 특징영역을 filtering 하여 pixel들의 정보로 활용하며 semi-dense 방식이라고도 한다.
15. Camera 기반 위치인식 방법론
1) Camera 기반 위치인식 기술 개념
- 정의 : 카메라 영상 데이터를 기반으로 제작한 정밀지도 상에서 자차에 실시간으로 들어오는 영상 데이털르 활용하여 위치인식, Localization을 하는 기술을 의미한다.
- 라이다와 마찬가지로 CM 단위의 정확도 확표가 목표
- Feature base, Direct 방식이 존재하며 지도와 동일한 방식으로 영상을 분석해 주어야 한다.
2) 기술의 원리
- 기본적으로 라이다와 큰 차이가 없음. 단 지도 생성방법과 일치하는 방식으로 위치인식을 진행해야 한다.
- 정밀지도에 특징정보가 많고, 입력되는 영상에도 특징정보가 많아야 성능 확보가 가능ㅎ다ㅏ.
16. A* 알고리즘 심화
1) A* 알고리즘 개념
주어진 출발 꼭짓점에서부터 목표 꼭짓점까지 가는 최단 경로를 찾아내는 그래프/트리 탐색 알고리즘.
2) 원리
- 4단계
- 탐색영역 파악
- 탐색 시작 영역에 대한 겨로 채점
- 탐색 영역을 확장하여 계속적인 탐색
- 경로 선택
- 위의 과정을 최대한 빠르게 반복하여 변화하는 내 차와 주변상황의 상황에 맞게 실시간 경로 생성 기술을 확보해야함.
17. RRT 알고리즘 심화
1) RRT 알고리즘 개념 및 원리
무작위 샘플링을 사용한 고차원의 구성공간을 탐색하는 경로 계획 알고리즘으로, 샘플 포인트를 주변에 뿌리면서, 계속적으로 확장하여 경로후보를 생성하고 최단거리와 같은 최적의 경로를 선택하는 알고리즘
임의의 한점 Xrand를 뽑고, 검색 트리를 확장해 나가는 방식
2) RRT 알고리즘의 적용
장애물 영역에 point를 뿌리지만 않으면 되기 때문에 장애물 회피가 용이할 수 있다.
Xrand를 뿌리는 방식에 따라 성능이 변화할 수 있음. Sparse 하게 뿌리면 연산량이 줄어 실시간성이 좋아지지만, 반대로 섬세한 경로 계획이 어렵다.
18. RRT* 알고리즘
1) RRT *
선택된 경로가 최적이라는 보장이 없는 RRT를 개선
2) RRT* 알고리즘 설명
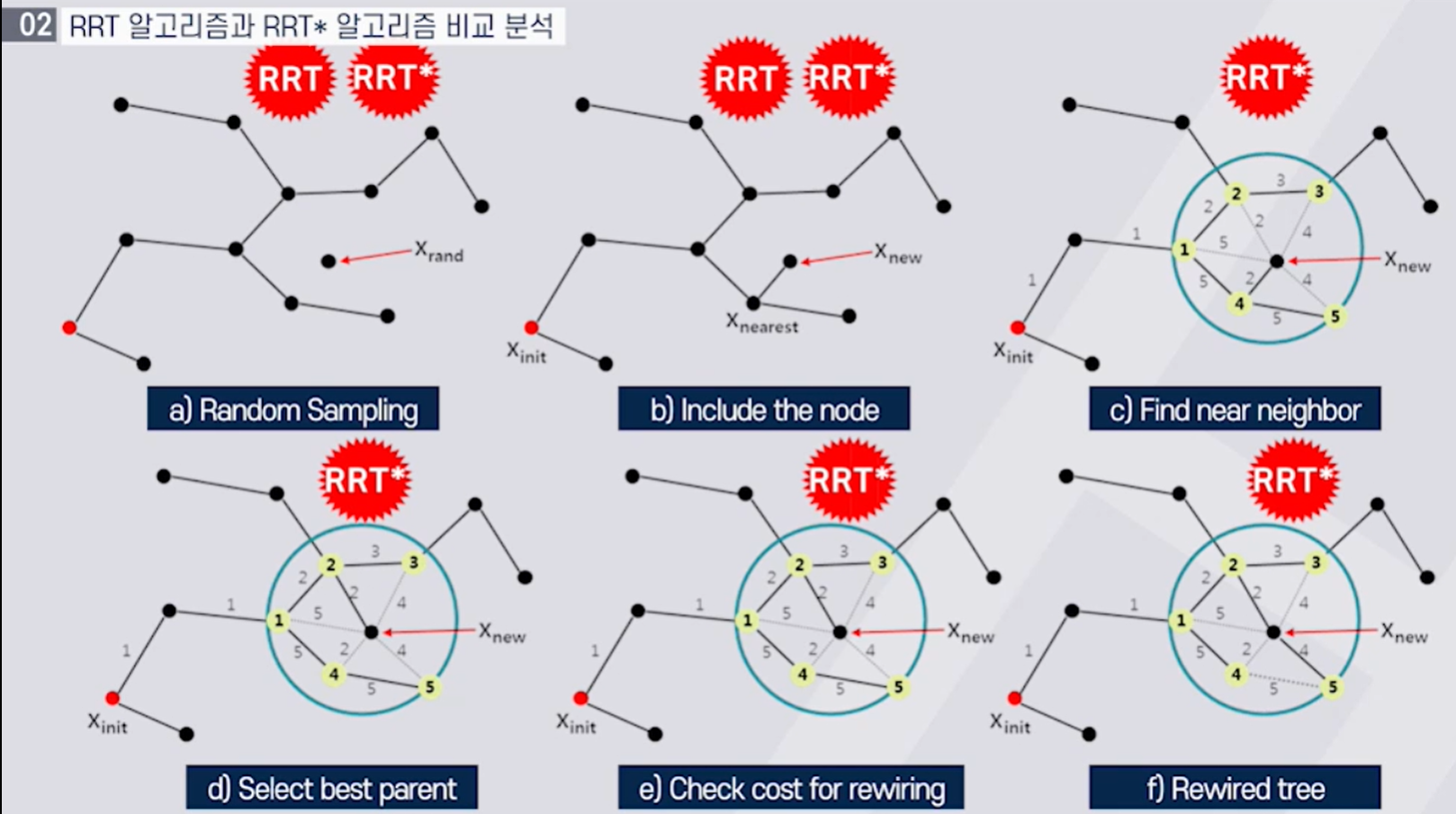
C에서 주변 노드들 탐색 후 cost가 최소인 best parent 선택. 이후 e에서 주변 노드들의 cost를 갱신하여 rewiring을 진행
19. Reinforcement Learning 심화
1) 강화학습 용어
Agent, State, Action, Reward등 존재
2) Policy, Value Function, Model 심화
-
Policy : Agent의 행동패턴. State에서 어떤 Action을 취할지를 결정한다. (Deterministic P >> 하나의 행동만. // Stochastic P >> 확률적으로)
-
Value Function : State 와 Action에 대하여 어느정도의 Reward를 돌려줄지에 대한 예측 함수
-
Model : 환경의 다음 State와 Reward가 어떻게 될 지에 대한 Agent의 예상.
Model-Based의 경우 다음 상태를 예측하지만, 오히려 정확하지 못하다면 성능저하의 원인이 될 수도 있음. Model-free 방식도 존재
Value Function이 완벽하다면 최적의 Policy를 찾게 된다.
Policy가 완벽하다면 Value Function은 필요하지 않다!
20. 자율주행을 구현하기 위한 기술적 방법론
1) 자율주행을 구현하기 위한 기술적 방법론
각 기술의 성능을 고도화하여 통합적인 시스템을 만들이 귕해 노력 중임
End to End : 모든 센서 정보를 제공하면 최종적으로 조향각 또는 가감속 정보가 바로 나오는 방식. AI 기술이 발전됨에 따라 활발히 연구중
2) End to End 학습 방식 자율주행
-
모방학습 : 숙련된 운전자의 주행 패턴을 따라하는 방식으로 지도 학습이다. 영상데이터 뿐 아니라, 조향 각도, 엑셀, 브레이크 등의 정보를 같이 수집하며, 별도의 라벨링이 필요하지 않다
-
강화학습 : 시뮬레이터 또는 운전자 수동주해을 통해 강화학습 기반으로 합리적인 주행이 가능하도록 진화하는 모델을 만드는 방식. 행동에 따른 보상체계를 수립하여, 자율주행 차량이 보상을 극대화 하는 최적의 행동을 하게 한다.
