1. 시스템 개론
1) 시스템 개요
- 사전적 정의 : 필요한 기능을 실현하기 위하여 관련 요소를 어떤 법칙에 따라 조합한 집합체. 각 구성요소들이 상호작용하거나, 상호 의존하여 복잡하게 얽힌 하나의 집합체이다
- 출력 : 기능이 실현 된느 것을 출력
- 입력 : 이 기능 실현을 위해서 시스템에 넣어주는 것
2) 시스템의 구성 요소
- 시스템을 이루고 있는 구성요소는 상태변수 이다.
- 어떤 법칙의 상호작용을 수식을 통해 나타낸다.
- 상태변수의 움직임을 공간에서 나타내는 모델이라는 의미로 상태공간모델이라고 한다.
- 수학적 모델은 입력을 받아 수학적 모델을 거쳐 출력으로 전달하는 역할을 하며 이러한 의미를 내포하는 전달함수라고 할 수 있다.
3) 시스템과 제어
- 수학적 모델을 최대한 정확하게 파악하여 시스템을 정확하게 모델링하는 것이 중요하다.
- 입력과 출력을 상정하고, 수학적 모델을 최대한 정확하게 파악하여 모델링을 해주는 것이 제어를 잘하기 위한 기초 작업이다
2. 제어 개론
1) 개루프와 폐루프

2) 피드벡 제어의 장점
오차를 지속적으로 고려하여 원하는 목표 달성이 용이하며 플랜트의 정보를 잘못 알고 있어도 달성 가능하다.
3) 피드벡 제어의 구성요소
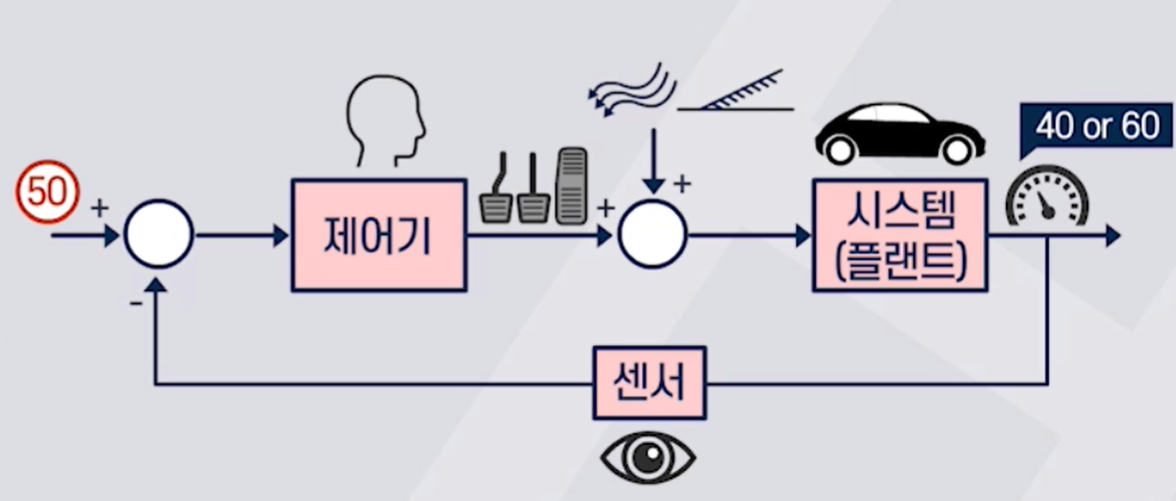
제어기는 센서를 통해 피트백을 받음
플랜트에는 제어기의 출력과 외란 값이 합쳐져서 입력된다
3. 시스템 제어 개발 프로세스
1) 시뮬레이션
실제 또는 가상의 모델을 이용하여 연결하는 것
자율주행에서는 현실세계와 자동차의 움직임을 정확하게 모델링하는 것이 중요하다
2) Software-in-the-loop Simulation
소프트웨어와 시뮬레이션을 이용해 평가와개발을 진행하는 것
- 주행환경과 자동차 모델을 자유롭게 변경 가능
- 실제 환경에서 측정하기 어려운 것들을 측정 가능
- 그래픽스 기반으로 쉽게 결과를 이해할 수 있다.
3) Hardware-ILS
- 자동차의 부품 혹은 모듈 최종결합전, 성능시험.
- 소프트웨어 부분에 해당하는 곳은 자유자제로 테스트 케이스 제작이 가능해 품질 향상 및 비용절감이 가능하다
4) Vehicle-ILS
도로주행하기 전 최종단계, 모든 차를 조립하고 주행은 가상환경에서 결과로 나타남
4. 기계적 시스템 모델링
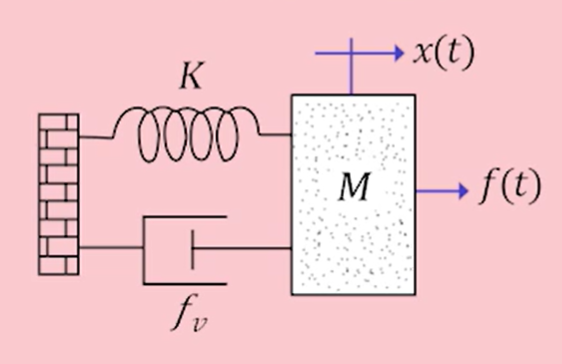
1) 병진운동
위치, 속도, 가속도에 의한 힘으로 기계적인 시스템을 알아낼 수 있음
- 질량 : 가속도와 관련된 상수
- 스프링 : 위치와 관련된 상수
- 댐퍼 : 속도와 관련된 상수
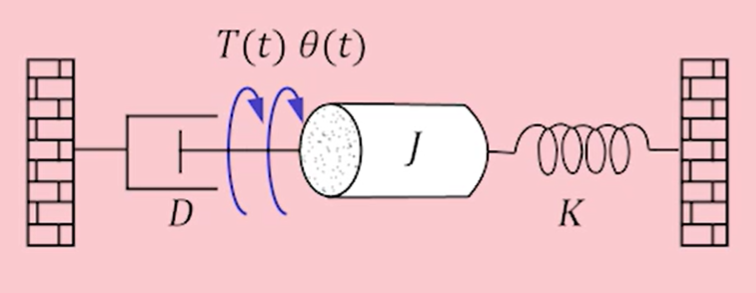
2) 회전운동
회전체의 위치, 각속도, 각가속도에 의한 토크로 나타낼 수 있음
- 관성모멘트 : 각가속도와 관련된 상수
- 스프링 : 위치와 관련된 상수
- 댐퍼 : 각속도와 관련된 상수
5. 시간응답 특성
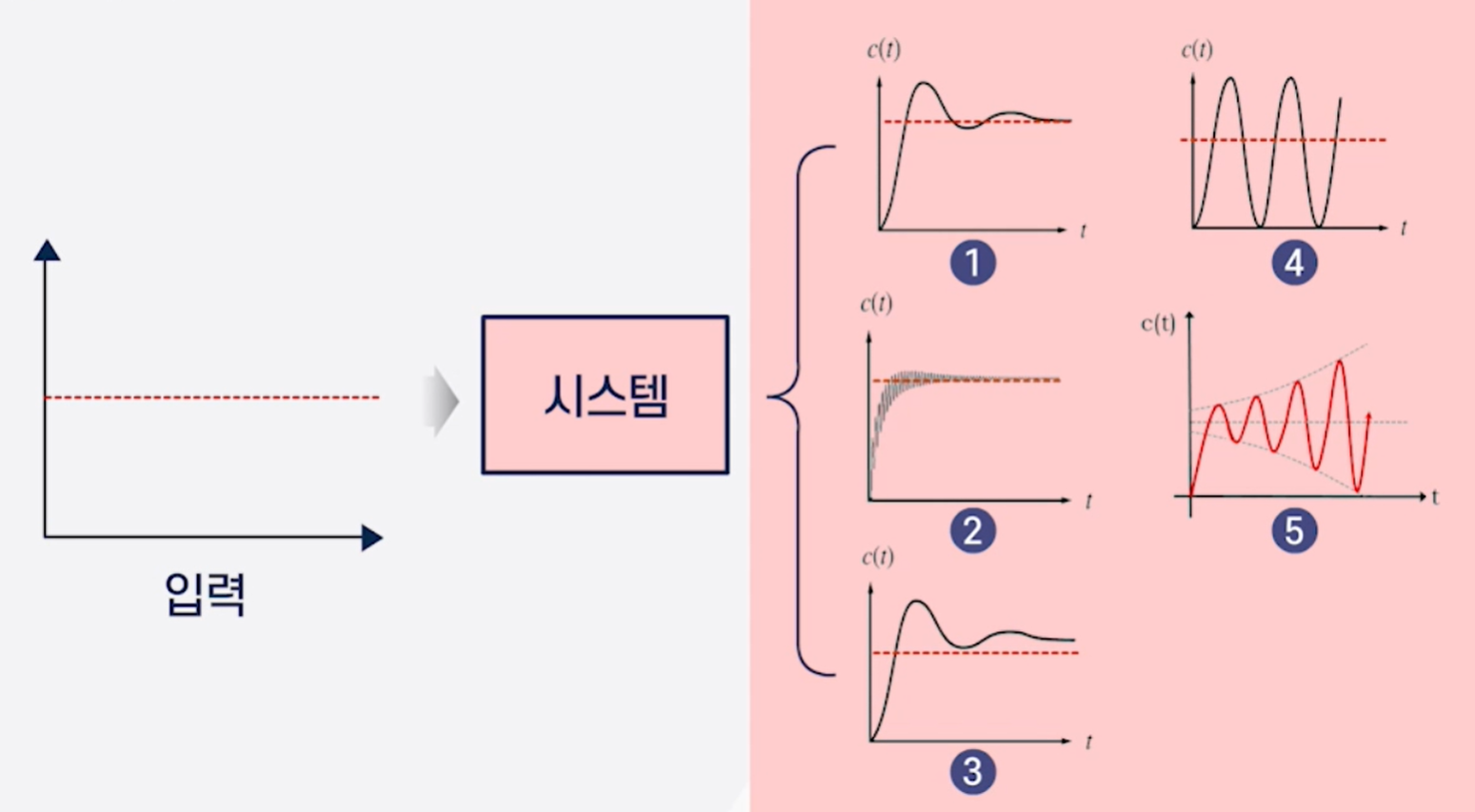
1) 시간응답 특성이란?
입력에 대한 시간영역에서의 응답
응답이 안정화 된 정상상태구간과 도달하기까지의 과도구간으로 구분한다.
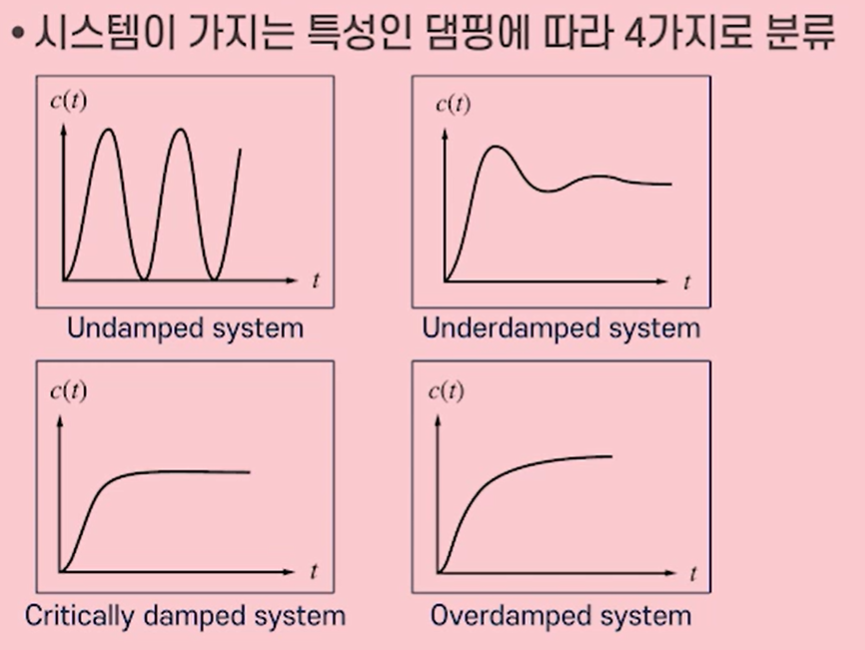
2) 시스템 특성에 따른 시간응답
3) 시간응답 특성의 구성요소
- 정착시간: 시간응답이 95프로 이내로 안정적으로 정착될 때 까지 걸리는 시간
- 상승시간: 시간응답이 최종 값의 10~90퍼센트에 이르기까지 걸리는 시간
- 피크시간: 시스템 출력이 최대치에 도달했을 때의 시간
- 퍼센트 오버슈트: 피크타임과 관련이 있으며, 최종값 대비 최고값과 최종값의 비율
- 정상상태오차 : 정상상태에서 입력에 의한 최종값과 목표 값의 차이
6. 제어 안정성
1) 안정한 시스템이란?
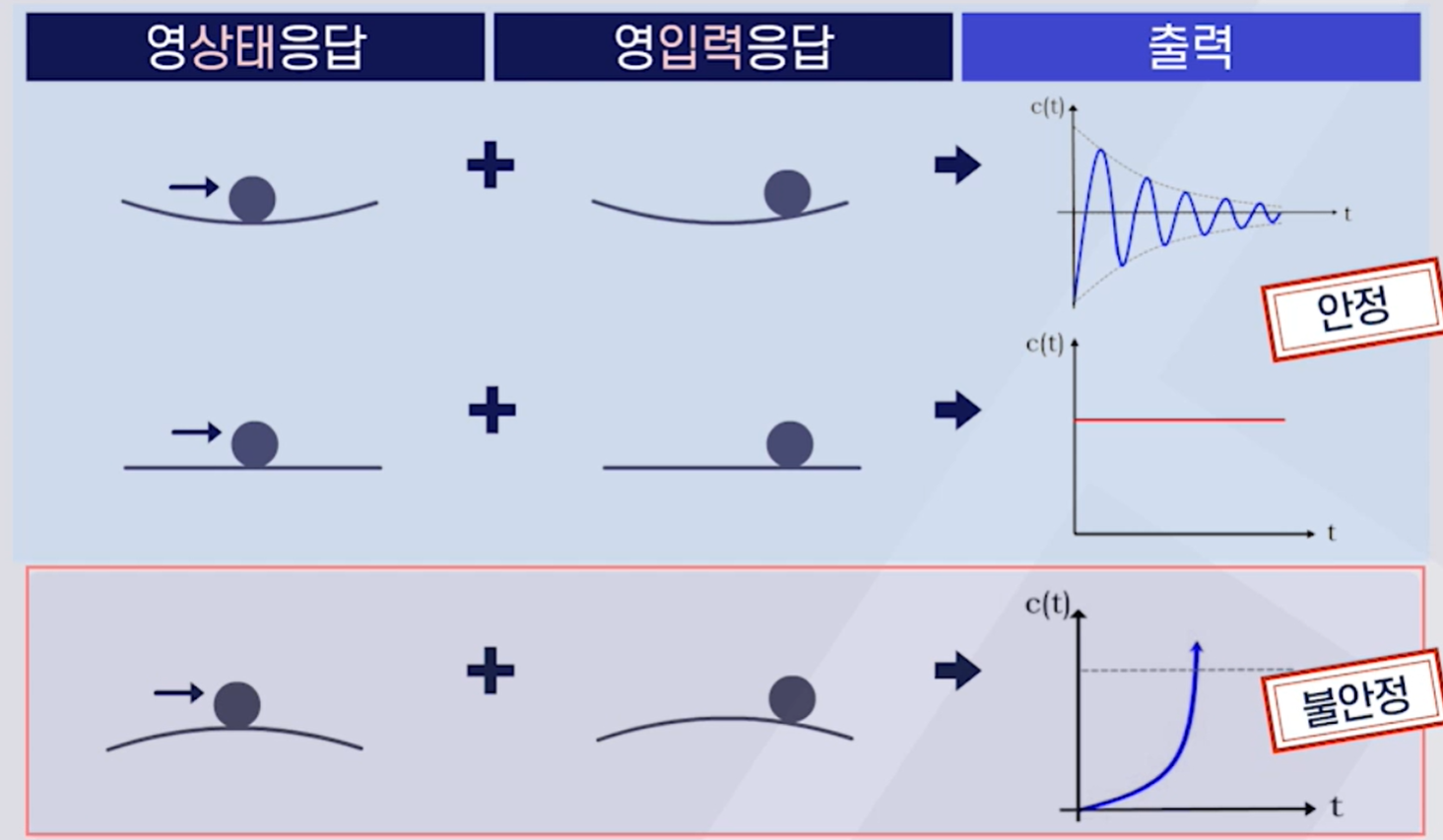
시스템의 출력이 발산하지 않는 것을 의미한다
- 전체 응답: 영상태응답 + 영입력응답
두가지 관점에서 모두 안정을 이루어야 한다
2) 영상태응답
입력에 의한 응답으로 초기조건이 0이다.
유한한 입력에 대해 출력의 크기가 유한하면 시스템이 안정하다고 말할수 있다.
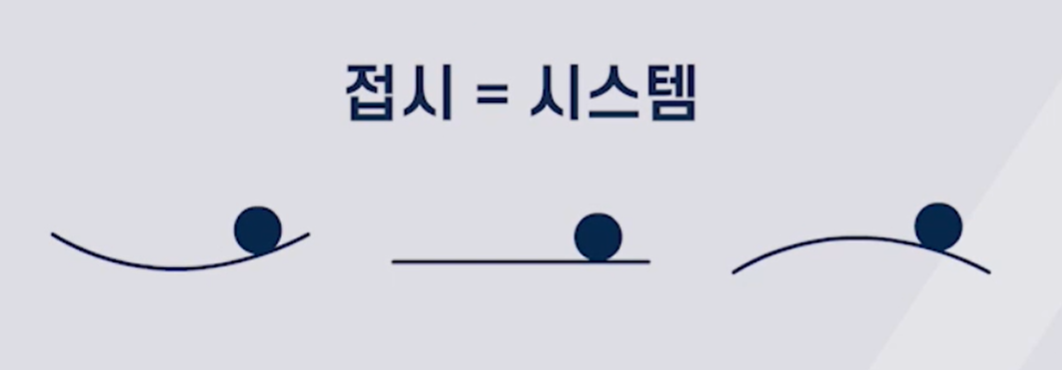
3) 영입력응답
초기 조건만에 의한 응답, 모든 입력이 0
모든 초기조건에 대하여 고려해야하며 점근적 안정, 임계안정, 불안정 등이 존재한다
4) 최종
제어기를 추가하여 불안정한 시스템을 안정한 시스템으로 만들어주려 한다.
7. PID 제어 개요
1) PID 제어기 구성
피드백을 이용한 제어방법중 가장 널리 알려진 제어 방법이다.
피드백과 우리가 원하는 목표 값의 차이를 오차, 혹은 에러라 하고, 이 에러 값에 비례상수, 미분상수, 적분 상수를 적용
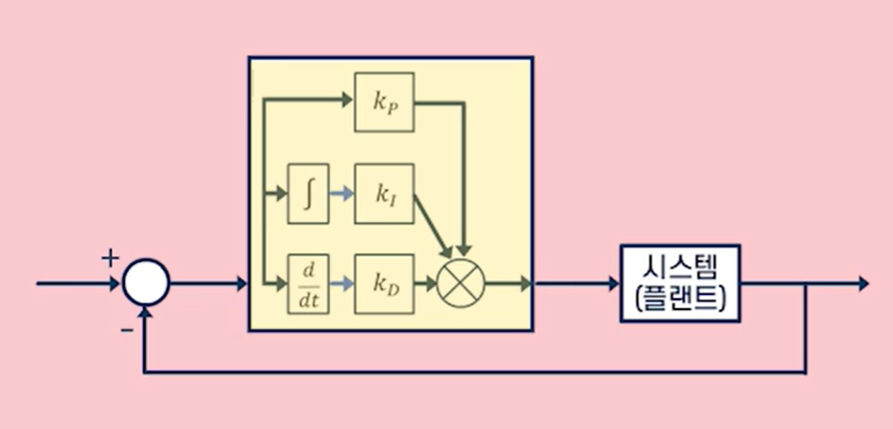
2) 비례제어기
오차와 비례상수를 이용해 목푝값에 도달하게 한다.
3) 적분제어기
정상상태 오차를 줄이기 위해 사용되는 제어기. 초기부터 발생한 오차를 계속 누적
4) 미분제어기
overshoot을 줄여주기 위한 제어기로, 시간의 따른 오차의 변화와 관계가 있다
8. 제동/구동/조향/현가시스템
1) 제동/구동 시스템
- 차체(BODY): 자동차의 겉부분으로 사람 또는 화물을 싣는 부분
- 차대(CHASSIS): 자동차가 주행할 수 있도록 하는 엔진, 동력장치, 조향장치, 브레이크 등으로 구성
2) 현가시스템
서스펜션: 자동차에 가해지는 충격이나 흔들림을 막아주는 장치로, 샤시스프링, 스태빌라이저 등의 부품으로 구성되어 완충역할을 하며 승차감에 큰 영향을 준다.
3) 조향시스템
운전자가 원하는 대로 자동차의 방향을 바꿔주는 장치
초기에는 수동이였으나 유압식, 전자 유압식, 전동식 파워스티어링등이 추가되는 상태
4) 샤시와 자동차의 움직임

9. 파워트레인
1) 파워트레인의 구성요소
파워트레인이란 동력장치 부터 실제로 힘이 작용하는 부분인 바퀴까지 모든 부품을 포함하는 전달 장치를 의미한다.
- 엔진 : 가솔린, 디젤로 구분. 전기자동차는 모터가 엔진의 역할을 수행함.
- 클러치 : 바퀴와 엔진을 분리. 분리하지 않고 기어 변속 시 기어가 마모됨.
- 변속기 : 엔진 동력을 속도 주행 환경에 따라 필요한 회전력으로 바꿔 주는 장치. 주행상황 별 적절한 토크를 내게 하고, 자동과 수동으로 나뉨.
- 종감속장치 : 동력 전달 및 회전축 방향을 변경해줌. 출력 토크 증대를 위해 감속의 역할
- 차동기어 : 회전각 차이로 달라지는 각 바퀴 속력 보정. 엔진 동력을 양 바퀴에 적절히 나눠주는 역할.
전달과정 : 엔진 > 클러치 > 변속기 > 추진축 > 종감속장치 및 차동기어장치 > 차축 > 바퀴
2) ECU (Engine Control Unit)
엔진의 흡기, 연료, 점화, 후처리 시스템을 제어
운전자의 의도대로 운전할수 있게 해준다
운전 상황에 따라 입력받은 엑셀과 브레이크로부터 적절한 파워를 내는 제어를 수행한다
3) TCU (Transmission Control Unit)
수동변속기 차량에서 사람이 직접 변속하던 것을 대신해주는 역할
적절한 변속지점을 선정하고 부드려운 변속을 진행
클러치 정밀제어, 지능형 제어 ,고장진단 등 다양한 시스템 존재
10. 제동시스템
1) 제동시스템 개요
달리즌 차량을 감속 또는 정지시키거나, 멈춰있는 차량을 계속 정지하게 해주는 장치. 마찰력을 이용해 동작하는 시스템이다. // 상용브레이크, 보조브레이크, 주파브레이크로 분류 가능
2) 제동시스템의 원리
유압식 브레이크 : 파스칼의 원리에 의해 동작 유압은 캘리퍼로 전달되며, 캘리퍼와 연결된 패드가 디스크를 꽉 잡아 마찰력이 생겨 바퀴의 움직임을 제한한다 // 페달 > 부스터 > 실린더 > 캘리퍼 > 디스크
3) 전자 제어장치
- ABS(Anti-lock Brake System) : 최대정지 마찰력을 이용한 제동. 잠궜다 풀었다.
- TCS(Traction Control System) : 바퀴의 구동력을 제어하는 시스템, 각 바퀴의 회전수가 변하는 경우 엔진과 브레이크를 조절해준다
- ESC(Electronic Stability Control) : ABS와 TCS를 포함한 모든 기능을 통합한 장치
11. Brake-by-Wire
1) Brake-by-Wire 개요
기계적인 방식으로 조작하던 것을 Wire에 의한 조작으로 대체한 것. 정교한 제어가 가능하며, 응답특성 개선, 설계 및 수정이 쉬우며, 유압대비 경량으로 연비도 향상시킨다.
하지만 고장에 대한 안정성이 불안하다.
2) 종류
- 전기 유압식 (Electro-Hydraulic-Brake) : 기존의 유압방식과 전기기계식의 중간. 습식이라고도 함
- 전기 기계식 (E-Mechanical-B) : 유압 없이 모터만을 이용하여 캘리퍼를 작동. 건식
- Hybrid EMB : 앞바퀴는 전기 유압식, 뒷바퀴는 전기기계식을 사용하는 방법
3) Brake-by-Wire의 구동
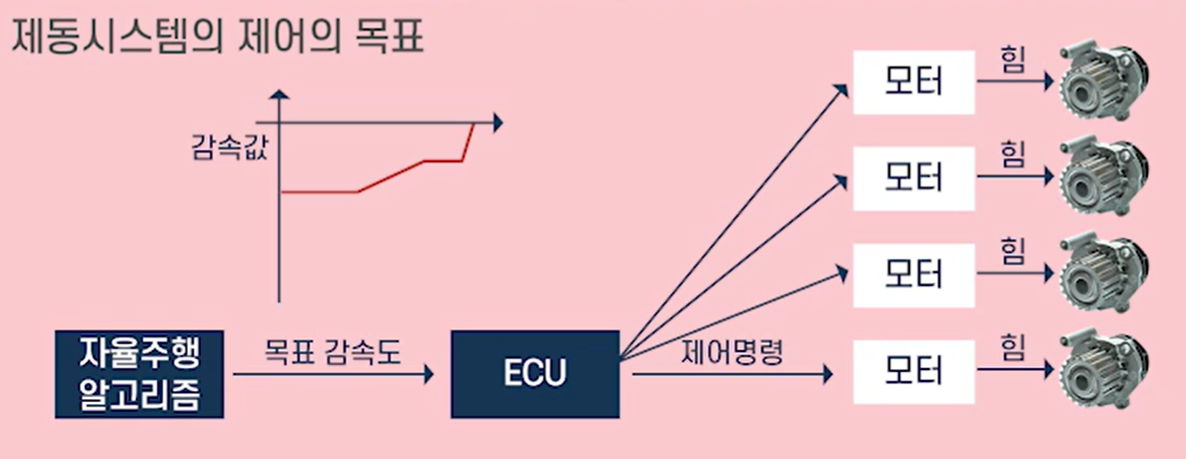
- 노면 상태, 바퀴의 미끄러짐 정도에 따라 안정적인 움직임을 위해 적절한 힘을 계산하고 제동
- 안정적인 움직임을 유지하는 것은 물론이고, 목표 경로를 원하는 속력으로 잘 따라갈수 있도록 적절한 제동을 해주는 것이 제동시스템의 제어 목표 이다.
12. 종방향 ADAS 개요
1) 종방향 ADAS의 개요
고급 운전자 지원시스템. Advanced Driver Assistant System. 종방향은 앞뒤 방향!
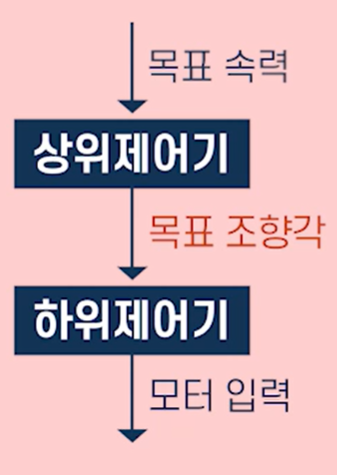
2) 상위제어기와 하위제어기
- 상위제어기 : 주행상황 인지, 판단을 통해 자동차가 가져야할 목표 속력값을 결정( 자율주행과 밀접 )
3) 종방향 ADAS의 종류
이때 스마크 쿠르즈 컨트롤은 안전거리 유지 기능까지 붙어있다!
13. 자동긴급제동시스템 / Autonomous Emergency Braking System
1) AEB와 구성요소
- ABE(Autonomous Emergency Breaking) : 충돌경고에도 운전자가 반응하지 않으면 자동적으로 브레이크를 밟아 멈추게 하는 기술
- TTC (Time to Collision) : 3단계를 구분하는 구성 요소중 한가지
2) TTC의 3단계
- 전방 주의 : 사람에게 앞에 무엇이 있다고 알려주는 단계
- 추돌 주의 : 이제 곧 충돌함을 알려주는 단계
- 긴급 제동 : 사람이 반응을 하지 않으면 제동까지 자동으로 하는 단계
3) AEB 응용 사례
- FCA(Forward Collision-Avoidance Assist) : AEB와 유사. 조형을 통한 회피가 추가됨
- FCA - JT (FCA - Junction Turning) : 교차로 죄회전 시 맞은편에서 다가오는 자동차와의 충돌 위험이 예상되면 제동
14. 순항제어 / Cruise Control
1) 순항제어란?
정속 주행장치로서 자동차가 일정한 속도로 달릴 수 있게 도와주는 장치이다.
2) 순항제어의 원리
- 바퀴 회전수로 파의 속도를 파악.
- 현재 차의 속도를 피드백 받아 지정속도와의 오차를 계산
- 오차를 줄이기 위해 전자식 액셀러레이토 제어, 쓰로틀, 연량, 기어 변속등을 수행하지만, 브레이크는 제어하지 않는다
3) 한계
연비의 문제가 있고, 차량감지 기능이 없어 ACC로 보완해 주어야 한다.
15. 적응형순항제어 / Adaptive Cruise Control
1) ACC란?
앞차의 주행 상황에 따라 속도를 자동으로 조절하는 기능이 합쳐진 CC.
2) 적응형순항제어의 원리
앞차량과의 상대거리를 피드백으로 받아 목표거리와 오차 계산, 제어를 하며 CC와 다르게 브레이크도 사용한다.
상대거리는 주로 레이더를 통해 추출하며, 목표거리는 상대속도에 따른 시간간격으로 결정. 1,2,3 단계가 있으며, 단계가 높을수록, 속도가 높을수록 더 먼 거리를 띄우고 주행하게 한다.
3) ACC 응용
네비게이션 기반 적응형 순항제어 (제한속도 정보를 get)
곡선로 보조 가능한 기능 추가
램프 진출입 시 내비게이션 기반 곡선로 보조기능을 제공 가능하며, 도로의 곡률을 판단하기 위해 GPS, 레이더, 라이다 센서 사용가능
16. 조향시스템 개요
1) 조향시스템
운전대를 회전시킬 때 이와 연결된 각 기구부를 움직여 바퀴의 방향을 바꾸어 차량의 주행방향을 제어할 수 있게 해주는 시스템. 수동 조향장치와 동력 조향장치(Power Steering)으로 구성된다.
2) 조향시스템의 구성
- 조작부 : 운전자가 운전대를 조작하여 회전력을 전달
- 기어부 : 회전력을 받아 기어부를 통해 회전을 감속, 토크 증가
- 링크부 : 조향 기어의 움직임을 앞 바퀴에 전달하는 역할
3) 조향시스템의 설계 조건
- 핸들 조작이 쉬워야함
- 도로 노면으로부터의 충격으로 핸들이 흔들리지 않아야함
- 고속 주행시에도 흔들리지 않고 안정적이어야함
- 핸들이 제자리로 돌아왔을 때, 자동차에 무리한 힘이 걸려서는 안됨
- 회전반경이 작고 방향전환이 쉬워야 한다(최소 회전 반경 : 자동차가 선회할 때 바깥쪽 앞바퀴가 그리는 퀘적의 최소반경, 회전반경이 작으면 자동차가 작은 원을 그리면서 회전하는 것을 의미한다. )
17. 조향시스템 구동
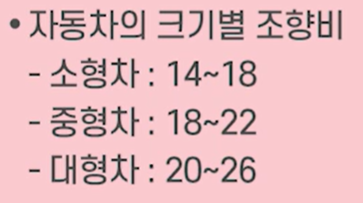
1) 조향비 개요
앞 바퀴가 1도 회전하는데 필요한 운전대의 회전 각도 비율
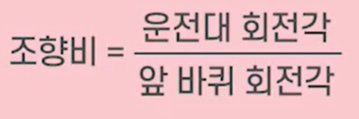
2) 조향비의 특성
조향비가 크면, 앞 바퀴를 1도 회전하기 위해서 더 많은 운전대의 회전이 필요하다는 것으로 핸들의 움직임에 둔감하다.
3) 가변 조향비
차량의 속도, 핸들의 각도를 고려한 조향비 선택
고속, 직진주행시 조향비를 크게 하여 자동차의 직진 주행성을 고려
커브가 심한 구간에선느 조향비를 낮게 하여 운전자의 의도대로 바퀴가 움직일수 있게 해준다.
4) 작동방법
랙- 피니언 , 기어를 거쳐서 회전운동이 직선운동이 되고, 자우 직선운동을 하게 되면 타이어의 방향을 바뀌고 자동차는 회전을 할 준비가 되며, 자동차가 속력을 내면 선회운동 시작
18. 조향시스템 종류
1) 파워스티어링
조향시스템에 추가적인 힘을 발생시켜주는 장치로 힘을 주는 방식에 따라서 유압식과 전자식으로 구분 가능
2) HPS(Hydraulic Power Steering)
유압식은 엔진과 유압펌프를 연결해 펌프에 추가가적인 힘을 발생시키는 형태이다. 핸들을 돌리는 방향에 따라 밸브를 열어 유압을 발생시켜 추가적인 도움을 받을수 있다
하지만 펌프구동을 위해 엔진의 동력을 쓰기에 연비가 낮다는 단점을 가지고 있다
3) EHPS 와 EPS
- EHPS : 모터를 이용해 유압을 조절하는 방식
- EPS : 모터만을 이용해서 보조 힘을 만들어내는 시스템
4) EPS 종류 (Motor Driven PS 라고도 함)
모터가 힘을 전달하는 위치에 따라 구분
R-EPS 는 렉에 집적적으로 구동하며 중형차 이상에서 많이 사용
C-EPS는 피니언 보다 위에서, P-EPS는 피니언 위에서 작용
19. 조향시스템 제어
1) EPS 보조 토크의 종류
- 보조제어 : 차량의 속도, 운전자의 입력 토크에 따라 보조 토크를 생성해 운전자를 보조해 주기 위한 제어
- 마찰 보상제어 : 모터와 감속기 사이의 마찰효과를 보상해주기 위해 보조 토크 생성
- 댐핑 보상제어 : 회전속도에 비례하여 회전 반대 방향으로 보조 토크 생성, 회전의 오버슈팅을 방지
- 관성보상제어 : 모터 관성 영향을 보상하기 위해 모터 각가속도에 비례하는 보조 토크 생성(멈춘 핸들은 관성을 가지기 때문)
- 복원제어 : 저속에서 모터 전류를 보상해 스티어링 휠이 회전한 후 직선위치로 복귀하도록 도와준다.
2) 자율주행에서의 EPS의 역할
보조 토크들과 함께 작동하는 EPS를 통해 자율주행차가 핸들을 조작하고 원하는 경로로 주행

20. 횡방향 ADAS 개요
1) 횡장향 ADAS의 개요
자율주행차가 직선과 곡선도로를 차선 중앙을 유지하면서 달리는 차선 유지 시스템이나, 자동으로 차선을 변경하는 시스템 등
2) 상위 제어기와 하위 제어기
3) 횡방향 ADAS의 종류
- Lane Keeping System
- Lans Change System
- Foward Collision Avoidance
- Blind Spot Detection
- Lane Departure Warning
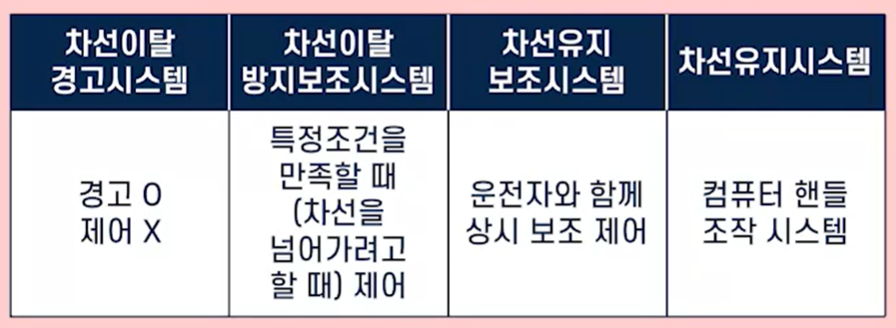
21. 차선 이탈방지 보조 시스템 (LKAS)
1) 차선 이탈방지 보조 시스템
운전자가 의도하지 않은 자동차의 차선이탈을 방지
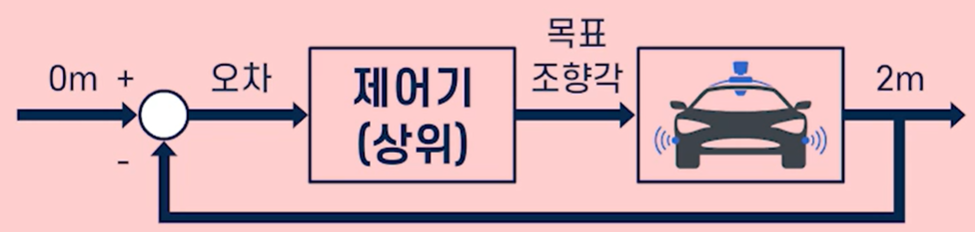
2) 원리
차량 위쪽의 카메라 영상처리르 통해 현재 주행 차량의 차선을 획득. 차선의 중앙점 게산을 통해 가상의 차선을 생성하고, 차량의 중심이 얼마나 멀어지는지를 모니터링
3) 차선 이탈방지 보조 시스템 설계
22. 차선유지시스템 (LKS)
1) 차선 유지 시스템
운전자가 운전대를 잡지 않아도 스스로 차선 유지! (LKAS는 운전대를 반드시 잡아야한다)
2) 차선유지시스템의 원리
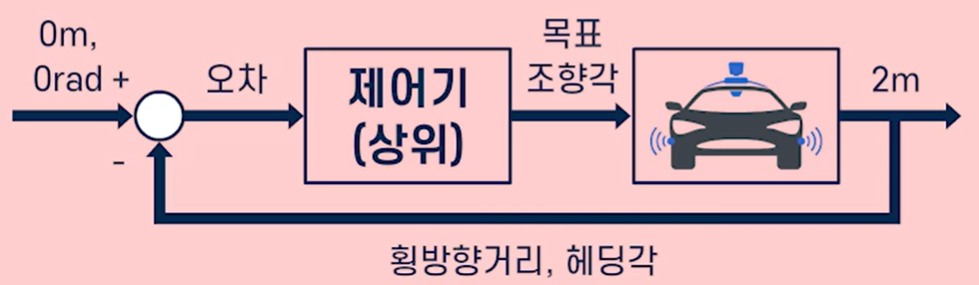
차선의 중앙점을 계산하고 가상의 차선을 생성, 이 가상의 차선을 잘 유지하는 것이 목적
3) 차선유지시스템 설계
- 헤딩각 : 차량의 승차감을 고려한 요소
- 차선중앙과의 횡방향 오차와 헤딩각 오차 두가지 모두 잘 고려해 주어야 한다.
23. 차선변경시스템
1) 차선 변경 시스템
운전자가 좌측 또는 우측 방향지시등을 동작시키면 스스로 차선을 변경하는 시스템
차선 변경 보조 시스템은 운전자가 제어의 주체로, 보조하는 역할만을 한다
2) 차선변경시스템의 원리
카메라를 이용하여 주행차로와 양 옆 차선 인식, 목표경로를 설정한다.
3) 차선변경시스템이ㅡ 설계
- 카메라가 정확하지 못해 발생하는 문제 존재!
- 정밀지도, 라이다, GPS등을 활용하여 극복 가능
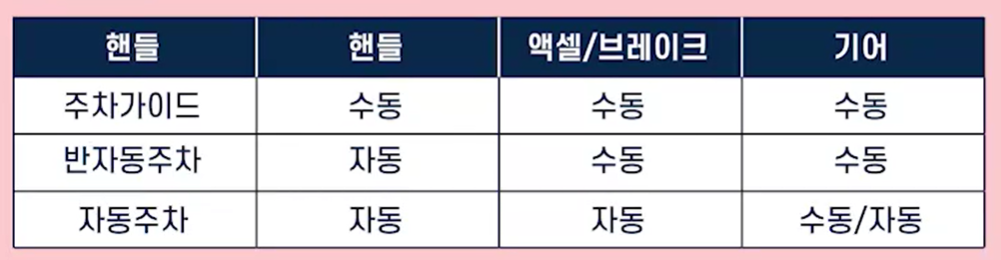
24. 자동주차시스템
1) 자동주차시스템
종방향, 횡방향움직임을 모두 고려해야함.
2) 원리
주차장에 진입하여 이동 >> 주차 경로계획 >> 운전자는 주차 버튼을 누르고 있거나, 차에서 내려 스마트키의 주차버튼을 누르면 완료
3) 자동주차와 자율주행차
- 자동주차시스템은 자율주행의 가장 대표적인 기능
- R-AEB(Rear- Autonomous Emergency Break
후방 장애물을 예측하여 충돌 방지. 경보를 울려도 반응이 없다면 스스로 멈춰섬
25. 자율주행 자동차
1) 인지/판단/제어
제어 : 목표 경로를 따라가기 위해서는 어떻게 움직여야 하는지에 대해서 최종적으로 결정
- 상위 제어기 : 목표 경로를 따라가기 위히서 목표 조향각과 목표 속도의 궤적을 만들어 내는 제어기.
- 하위 제어기 : 목표 도달하기 위해 각각의 시스템을 제어. 이미 ECU를 통해 많은부분이 제어가 가능하고 최적화가 이루어져 있음
2) 종횡방향 제어를 통한 자율주행차
인지, 제어, 판단을 반복
점차 횡방향, 종방향을 모두 고려하는 통합제어기의 형태로 나아가고 있는 추세. 이에 서스펜션까지 고려한다면 금상첨화!
26. 현가시스템
1) 현가시스템 개요와 역사
서스펜션이라고도 하며, 차체와 차축 사이에 설치된 완충장치로서 차체의 무게를 지지하고 도면의 노면으로 전해지는 진동이나 충격을 흡수하는 역할을 한다.
이는 운전자에게 좋은 승차감과 조정의 안정성을 제공하며, 마차에서부터 사용되어왔다.
2) 현가시스템 구성과 종류
- 차축 (Axle Shaft) : 엔진에서 발생하는 동력을 바퀴에 전달하고, 양쪽 끝에 달려있는 바퀴를 통해 차량의 무게를 지지
-
차축식 : 하나의 긴 차축에 좌우에 바퀴가 연결되어 있고, 이것이 현가장치를 거쳐 차체에 연결되며 오프로드 차량에서 많이 볼 수 있다.
-
독립식 : 바퀴와 차대가 링크구조로 연결되어 있으며, 차축과 현가장치의 구별이 명확하지 않다. 양쪽 바퀴가 서로 독립적이여서 서로 다른 움직임 간으
3) 현가시스템 모델
차축과 연결된 스프링과 댐퍼의 상수에 다라 운전자의 승차감이 달라지며, 댐퍼가 추가되면서 undamped system 에서 Underdamped 시스템으로 바뀌어 감쇠현상이 발생.
27. 전자식 현가시스템
1) 전자식 현가시스템 개요
편안한 승차감을 주기 위해서는 현가장치가 부드러워야 하고, 주행 안전성을 위해서는 현가장치가 딱딱해야함
이를 ECS(Electronic Control Suspension) 을 통해서 상황에 따라 능동적으로 대처가 가능하도록 함. 댐퍼와 스프링을 적절하게 제어
2)전자식 현가시스템 구성요소와 제어
- 구성요소
Shock Absober(완충기): 댐퍼의 역할을 하는 장치. ECS의 경우 오리피스 구멍의 크기를 조절
스프링 : 적절한 탄성계수를 선택하여 고속에서 차체가 낮아지게 해 접지력을 향상시킴 - 제어 종류
안티롤링, 안티 스쿼트(급출발시 앞부분 들림), 안티 다이브(급정지시 뒷부분 들림), 안티 피칭(과속방지턱이나 요철에서 발생), 안티 바운싱
3) 지능형 현가시스템
승차감을 좀더 안정적으로 만들어준다. 과속방지턱이나, 포트홀과 같이 운전자의 승차감을 저하시키거나 자동차 차체에 큰 충격을 주는 상황에 대응이 가능함.
각종 센서들을 통해 얻은 과속방지턱 혹은 포트홀의 위치를 입력받아, 주행속도와 도로조건을 고려하여 서스펜션의 감쇠력을 조절하며 이는 프리뷰 전자제어서스펜션이라고도 한다.
이러한 시스템과 자율주행이 연결되면 보다 안정적이고 편안한 자율주행차가 완성될 수 있다.
