컨디션 변수
지금까지 락의 개념을 학습하였다. 불행히도 "락"만으로는 병행 프로그램을 제대로 작성할 수 없다.
쓰레드가 계속 진행하기 전에 어떤 조건이 참인지를 검사하는 경우가 많다.
volatile int done = 0;
void *child(void *arg) {
printf("child\n");
done = 1;
return NULL;
}
int main(int argc , char *argv[]) {
printf("parent: begin\n");
pthread_t c;
Pthread_create(&c, NULL, child, NULL); // 자식 생성
while (done == 0)
; // 회전
printf("parent: end\n");
return 0;
}- 예를 들어 부모 쓰레드가 자식 쓰레드의 종료를 기다리는 경우
- 이 방식은 부모 쓰레드가 회전을 하며 CPU를 낭비하므로 비효율적
- 이 방법 대신 부모 쓰레드가 특정 조건이 참이 될 때까지 잠자면서 기다리는 방법이 더 좋다.
핵심 질문: 조건을 기다리는 법
멀티 쓰레드 프로그램에서는 특정 조건이 참이 되기를 기다리는 것이 유용할 때가 많이 있다. 그렇다면 쓰레드는 어떻게 조건을 기다려야 할까?
1. 정의와 루틴들
컨디션 변수(condition variable): 어떤 실행의 상태(조건)가 원하는 것과 다를 때 조건이 참이 되기를 기다리며 쓰레드가 대대기할 수 있는 큐.
-
일종의 큐 자료구조이다.
-
다른 쓰레드가 상태를 변경 -> 대기중인 쓰레드에 시그널을 보내 깨움
-
사용 방법
// 컨디션 변수 초기화 pthread_cond_t c = PTHREAD_COND_INITIALIZER; // wait/signal 연산 pthread_cond_wait(pthread_cond_t *c , pthread_mutex_t *m); pthread_cond_signal(pthread_cond_t *c);wait(): 락을 해제하고 호출한 쓰레드를 재우는 함수- 호출될 때 mutex는 잠겨있다고 가정
wait()에서 리턴하기 전에 락을 재획득해야 한다!- 만약 락을 재획득 못하면 다시 sleep 상태가 되기 때문이다.
(경쟁조건 방지 목적)
signal(): 조건이 참이 되길 기다리며 잠자고 있던 쓰레드를 깨우는 함수
-
경쟁조건 방지 예제
int done = 0; pthread_mutex_t m = PTHREAD_MUTEX_INITIALIZER; pthread_cond_t c = PTHREAD_COND_INITIALIZER; void thr_exit() { Pthread_mutex_lock(&m); done = 1; Pthread_cond_signal(&c); Pthread_mutex_unlock(&m); } void *child(void *arg) { printf("child\n"); thr_exit(); return NULL; } void thr_join() { Pthread_mutex_lock(&m); while (done == 0) // if 문을 사용하지 않는다. Pthread_cond_wait(&c , &m); Pthread_mutex_unlock(&m); } int main(int argc , char *argv[]) { printf("parent: begin\n"); pthread_t p; Pthread_create(&p , NULL , child , NULL); thr_join(); printf("parent: end\n"); return 0; }- 경우 1: 부모 쓰레드가 자식 쓰레드를 생성하고,
thr_join()을 호출한 후 자식 쓰레드가 끝나길 기다리는 경우- 부모가 자식 쓰레드를 생성한다.
- 부모 쓰레드에서
thr_join()을 실행하여 sleep 상태가 된다.
(wait()을 호출하고 락을 반납함) - 자식 쓰레드에서
thr_exit()을 실행하여done을 1로 바꾸고 시그널을 보내 잠든 (부모) 쓰레드를 깨운다. - 부모 쓰레드가 깨어나 락을 획득한 채로 리턴되고, 최종적으로 락을 해제하고
parent:end를 출력한다.
- 경우 2: 부모 쓰레드가 자식 쓰레드를 생성하자 마자 자식 쓰레드가 실행되는 경우
- 부모가 자식 쓰레드를 생성한다.
- 생성된 자식 쓰레드가 바로 실행되어
done이 바로 1로 설정되고, 쓰레드를 깨우기 위한 시그널은 보낸다. - 자고있는 쓰레드가 없기 때문에 단순히 리턴한다.
- 이후 부모 쓰레드가
thr_join()을 실행하고,done이 1이므로 대기 없이 리턴한다. - 만약 상태변수
done이 없다면 부모 쓰레드가 영원히 잠들게 된다. 부모를 깨워줄 자식 쓰레드도 없고, 자식 쓰레드가 이미 실행되었던 상태인지도 모르기 때문이다.
참고: 시그널을 보내기 전에 항상 락을 획득하자
void thr_exit() { done = 1; Pthread_cond_signal(&c); } void thr_join() { if (done == 0) Pthread_cond_wait(&c); }- 부모 쓰레드에서
wait()를 수행하기 직전에 인터럽트가 걸렸다고 가정 - 인터럽트로 자식 쓰레드가 실행되어
done을 1로 바꾸고 시그널을 보낸다. - 이후 부모 쓰레드에서
wait()를 수행하지만, 자식 쓰레드는 이미 실행된 상황이라 더이상 부모를 깨워줄 자식이 존재하지 않게 된다.
- 경우 1: 부모 쓰레드가 자식 쓰레드를 생성하고,
2. 생산자/소비자(유한버퍼) 문제
다음으로 살펴볼 동기화 문제는 Dijkstra가 처음 제시한 생산자/소비자(producer/consumer) 문제이다. 유한 버퍼(bounded 버퍼) 문제로도 알려져 있다.
생산자/소비자 문제 (유한버퍼 문제)
-
생산자 쓰레드는 데이터를 만들어 버퍼에 넣고, 소비자 쓰레드는 데이터를 꺼내어 사용한다.
-
유한버퍼는 공유 자원이며, 경쟁 조건의 발생을 방지하기 위해 동기화가 필요하다.
-
get/put 함수 정의
// get/put 함수 정의 int buffer; // 일단 지금은 정수 하나로 정의 int count = 0; // 처음엔 버퍼 비어있음 void put(int value) { assert(count == 0); // 비었는지 확인용 count = 1; buffer = value; } int get() { assert(count == 1); // 찼는지 확인용 count = 0; return buffer; }- 이후 예제에서 반복문으로 버퍼에 값을 넣고 꺼낼 것이다.
-
생산자/소비자 쓰레드 v1
// 생산자/소비자 쓰레드 v1 void *producer(void *arg) { int i; int loops = (int) arg; for (i = 0; i < loops; i++) { put(i); } } void *consumer(void *arg) { int i; while (1) { // 값을 무한히 추출 int tmp = get(); printf("%d\n", tmp); } }- 이 코드는 제대로 동작하지 않는다.
- 락이 없어 공유 자원인
buffer에 대해 경쟁 조건이 발생한다.
불완전한 해답
아래의 예에서 생산자와 소비자가 각각 하나씩 있고, 컨디션 변수 cond와 그것과 연결된 mutex 락을 사용한다.
cond_t cond;
mutex_t mutex;
void *producer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // p1
if (count == 1) // p2
Pthread_cond_wait(&cond , &mutex); // p3
put(i); // p4
Pthread_cond_signal(&cond); // p5
Pthread_mutex_unlock(&mutex); // p6
}
}
void *consumer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // c1
if (count == 0) // c2
Pthread_cond_wait(&cond , &mutex); // c3
int tmp = get(); // c4
Pthread_cond_signal(&cond); // c5
Pthread_mutex_unlock(&mutex); // c6
printf("%d\n", tmp);
}
}- 이번에는 락이 생겼다. 하지만 락의 추가만으로 제대로 동작하지는 않고, 컨디션 변수가 있어야 제대로 동작한다.
- 1 생산자, 1 소비자인 경우
- 생산자는 버퍼가 빌때까지 기다린다 (p1~p3)
소비자도 버퍼가 찰때까지 기다린다 (c1~c3) - 위의 코드는 잘 동작한다.
- 생산자는 버퍼가 빌때까지 기다린다 (p1~p3)
- 1 생산자, 2 소비자인 경우 (or 여러 소비자인 경우)
- 소비자 쓰레드: ,
- 생산자 쓰레드:
- 가 가장 먼저 실행된다고 가정
- 실행 과정
- 가 락을 획득(c1)하고 조건문 검사(c2), 이후
wait()을 호출하여 락을 해제(c3)한다. - 가 실행되어 락을 획득(p1)하고 버퍼가 비었음을 확인(p2)한다.
put()으로 넘어가서 버퍼를 채운다(p4).- 생산자는 버퍼가 가득 찼다는 시그널을 보낸다(p5).
- 이때, 이 깨어나 ready queue로 이동한다. 실행할 수 있는 상태이지만, 실행 상태는 아니다.
- 생산자는 실행을 계속 하고(p6), 루프를 한번 더 돌아 대기 상태로 전이한다(p1~p3).
(count가 1로 버퍼가 찼기 때문에 대기하는 것) - 여기서 문제 발생! 다른 소비자 가 끼어들어 버퍼 값을 소비한다(c1,2,4,5,6).
- 이후에 이 다시 실행되는데,
get()을 실행(c4)시키려고 하지만 버퍼가 비어있다...
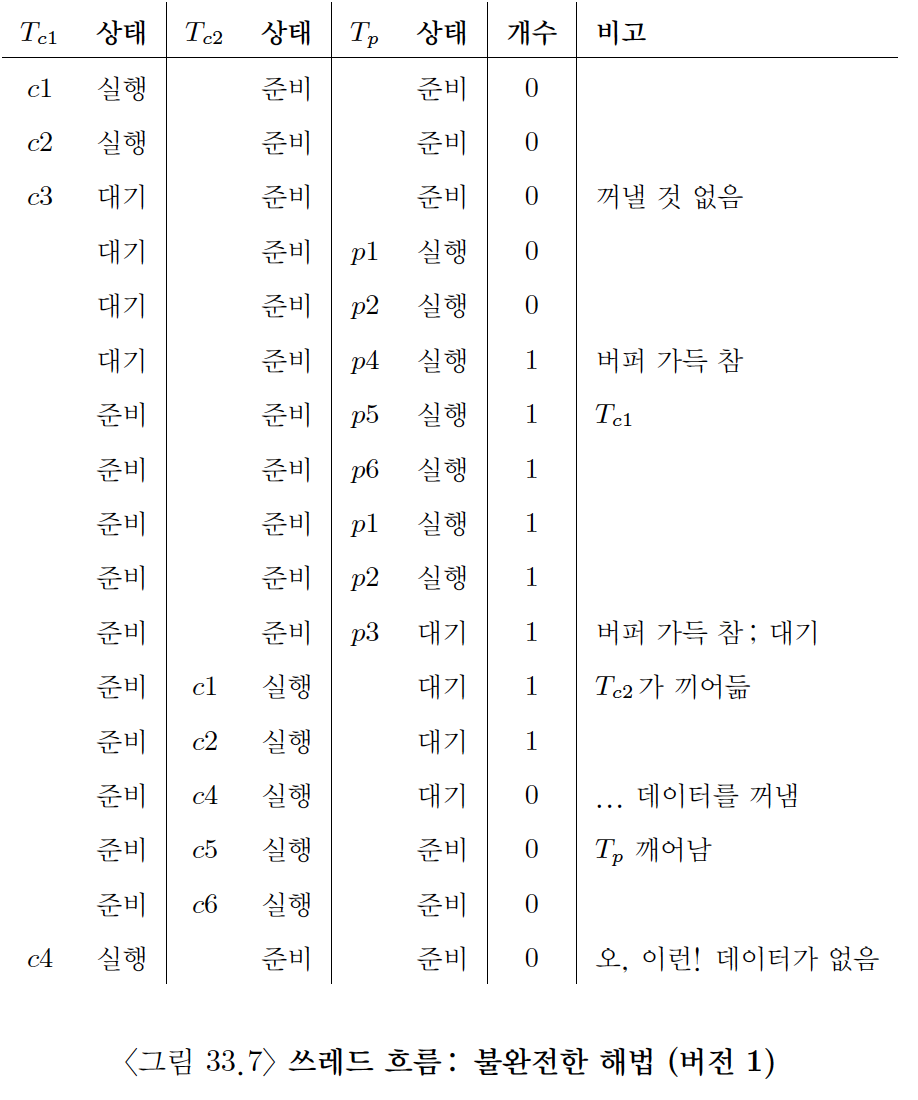
- 원인은 이 깨어나기 전에 유한 버퍼의 상태가 변경되었기 때문이다.
- 시그널은 상태가 변경되었을 쑤 있다는 힌트에 불과하며, 깨어난 쓰레드가 실제 실행 시점에서 상태가 유지된다는 보장이 없다. (Mesa semantic)
- 가 락을 획득(c1)하고 조건문 검사(c2), 이후
개선된, 하지만 아직도 불완전한: if문 대신 while문
위의 문제는 if 문을 while 문으로 바꾸는 것으로 쉽게 해결이 가능하다.
cond_t cond;
mutex_t mutex;
void *producer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // p1
while (count == 1) // p2
Pthread_cond_wait(&cond , &mutex); // p3
put(i); // p4
Pthread_cond_signal(&cond); // p5
Pthread_mutex_unlock(&mutex); // p6
}
}
void *consumer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // c1
while (count == 0) // c2
Pthread_cond_wait(&cond , &mutex); // c3
int tmp = get(); // c4
Pthread_cond_signal(&cond); // c5
Pthread_mutex_unlock(&mutex); // c6
printf("%d\n", tmp);
}
}- 이번에는 소비자 이 깨어나서(락을 획득한 상태), 즉시 공유 변수의 상태를 재확인한다(c2).
- 만약 이 시점에 버퍼가 비어 있다면, 소비자는 대기상태로 돌아간다 (c3).
Mesa semantic의 가장 기본적인 법칙은 언제나 while 문을 사용하는 것이다. 이게 안전하다.
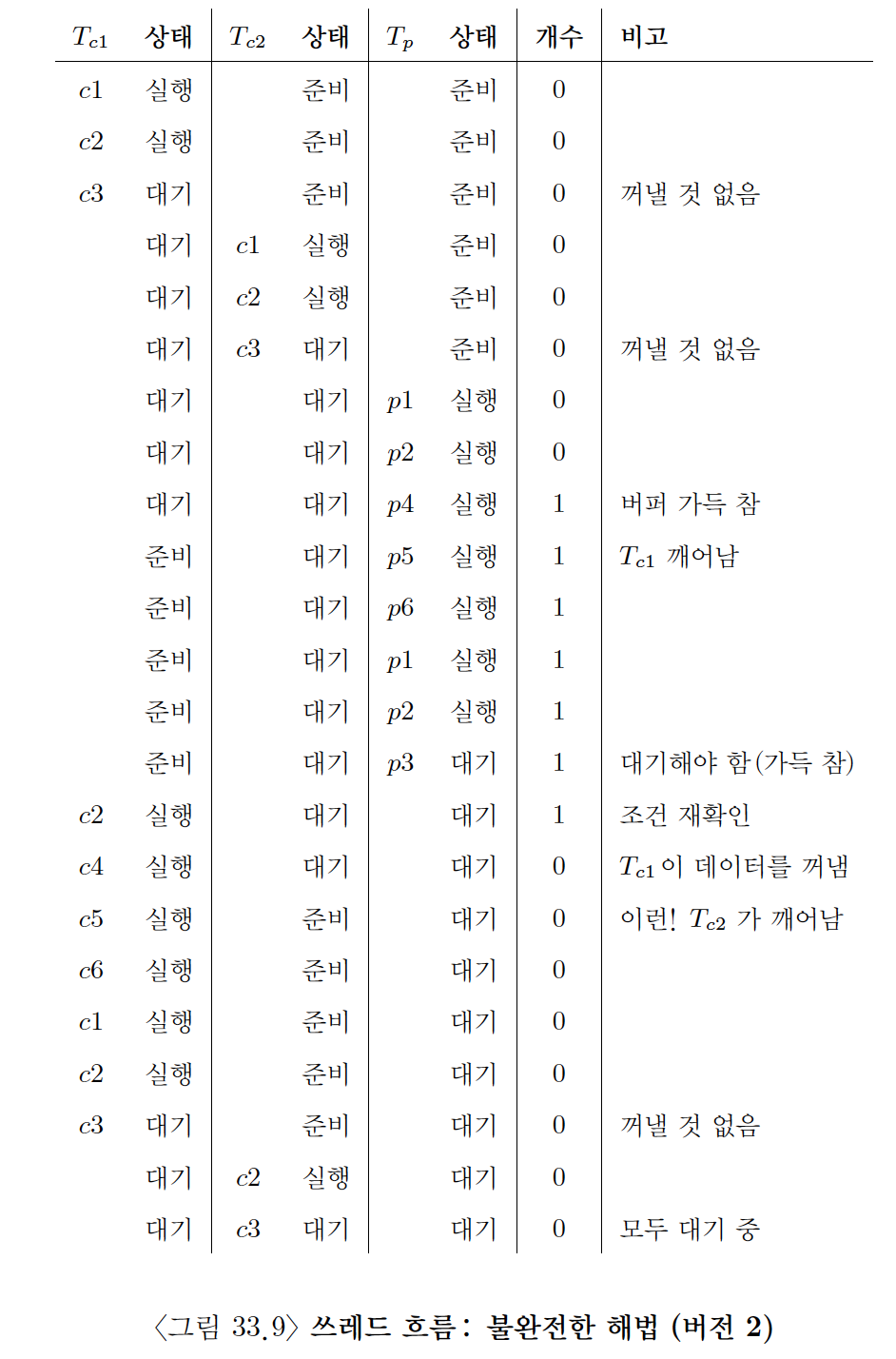
그러나 위의 코드도 문제가 있다. , 이 둘 다 대기 상태에 있을 때 발생한다.
- 생산자가 버퍼에 값을 넣고 소비자 쓰레드() 하나를 깨웠다고 하자.
- 생산자는 대기상태가 되고, 소비자 는 리턴을 받아 깨어나고(c3) 조건을 재확인한다(c2).
- 버퍼가 차있다는 것을 발견하고 값을 소비한다(c4).
- 이 소비자는 시그널을 전송(c5)하여 대기중인 쓰레드 중 하나를 깨운다.
- 어느 쓰레드를 깨울 것인가?
생산자 ? 아니면 또다른 소비자 ?
- 어느 쓰레드를 깨울 것인가?
- 만약 다른 소비자 가 깨어난다면 버퍼가 빈 것을 확인하고(c2) 대기 상태로 들어간다(c3).
- 버퍼에 값을 넣어야 하는 생산자 는 대기중이며, 도 아까 대기상태가 되었다.
즉, 모든 쓰레드가 대기상태가 된 것이다.
- 시그널을 보내는 것은 꼭 필요하지만 대상이 명확해야 한다.
소비자는 생산자를, 생산자는 소비자를 깨워야만 한다.
단일 버퍼 생산자/소비자 해법
cond_t empty, fill;
mutex_t mutex;
void *producer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex);
while (count == 1)
Pthread_cond_wait(&empty , &mutex);
put(i);
Pthread_cond_signal(&fill);
Pthread_mutex_unlock(&mutex);
}
}
void *consumer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex);
while (count == 0)
Pthread_cond_wait(&fill , &mutex);
int tmp = get();
Pthread_cond_signal(&empty);
Pthread_mutex_unlock(&mutex);
printf("%d\n", tmp);
}
}- 두 개의 컨디션 변수를 사용
- 시스템의 상태가 변경되었을 때 깨워야 하는 쓰레드에게만 시그널을 제대로 전달한다.
- 생산자 쓰레드는 empty에 대해 대기하고 fill에 대해 시그널을 발생시킨다.
- 소비자 쓰레드는 fill에 대해 대기하고 empty에 대해 시그널을 발생시킨다.
- 이로써 생산자는 소비자만을, 소비자는 생산자만을 깨운다.
최종적인 생산자/소비자 해법
이제 제대로 동작하는 생산자/소비자 해법을 얻었지만 아직까지는 보편적인 방법은 아니다. 마지막 변경을 통해 병행성을 증가시키고 더 효율적으로 만들 수 있다.
- 버퍼 공간을 추가하여 대기 상태에 들어가기 전에 여러 값들이 생산될 수 있도록 한다.
- 여러 개의 값이 대기 상태 전에 소비될 수 있도록 한다.
int buffer[MAX];
int fill = 0;
int use = 0;
int count = 0;
void put(int value) {
buffer[fill] = value;
fill = (fill + 1) % MAX;
count++;
}
int get() {
int tmp = buffer[use];
use = (use + 1) % MAX;
count−−;
return tmp;
}- 버퍼를 배열 구조로 바꾸었고, 이에 따라 put/get 함수도 변경하였다.
// 동작하는 최종 해법
cond_t empty , fill;
mutex_t mutex;
void *producer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // p1
while (count == MAX) // p2
Pthread_cond_wait(&empty , &mutex); // p3
put(i); // p4
Pthread_cond_signal(&fill); // p5
Pthread_mutex_unlock(&mutex); // p6
}
}
void *consumer(void *arg) {
int i;
for (i = 0; i < loops; i++) {
Pthread_mutex_lock(&mutex); // c1
while (count == 0) // c2
Pthread_cond_wait(&fill , &mutex); // c3
int tmp = get(); // c4
Pthread_cond_signal(&empty); // c5
Pthread_mutex_unlock(&mutex); // c6
printf("%d\n", tmp);
}
}- 생산자는 모든 버퍼가 현재 가득 차있다면 대기 상태에 들어간다(p2).
- 마찬가지로, 소비자도 모든 버퍼가 비어 있다면 대기에 들어간다(c2).
3. 컨디션 변수 사용 시 주의점
// 몇 byte나 힙이 비어 있는가?
int bytesLeft = MAX_HEAP_SIZE;
// 락과 컨디션 변수가 필요함
cond_t c;
mutex_t m;
void *allocate(int size) {
Pthread_mutex_lock(&m);
while (bytesLeft < size)
Pthread_cond_wait(&c , &m);
void *ptr = . . . ; // 힙에서 메모리를 할당받음
bytesLeft −= size;
Pthread_mutex_unlock(&m);
return ptr;
}
void free(void *ptr , int size) {
Pthread_mutex_lock(&m);
bytesLeft += size;
Pthread_cond_signal(&c); // 시그널 전달 대상은?
Pthread_mutex_unlock(&m);
}- 메모리 할당 코드를 호출하면 공간이 생길 때까지 기다려야할 수 있다.
반대로, 쓰레드가 메모리 반납시, 사용 가능한 메모리 공간의 발생을 알리는 시그널을 생성할 수 있다. - 하지만 이 코드에는 문제가 있다. 어떤 쓰레드가 (하나 이상의 쓰레드가 대기 중일 수 있으므로) 깨어나야 하는가?
- 예시
- 현재 빈 공간이 없이 메모리 꽉 찼다고 가정
- 쓰레드 Ta:
allocate(100)실행
쓰레드 Tb:allocate(10)실행 - 두 쓰레드 Ta, Tb는 대기 상태에 돌입 (메모리 꽉 참)
- 이 시점에서 Tc가
free(50)호출
-> 무조건 Tb가 깨어나야 하지만, 보장 불가능
- 해법:
pthread_cond_signal()대신pthread_cond_broadcast()을 사용하여 대기중인 모든 쓰레드를 깨운다. - 단점: 아직 깨어나면 안 되는 여러 쓰레드가 불필요하게 깨어날 수도 있다. (포함조건, covering condition)
- 메모리 할당 문제의 경우 브로드캐스트를 사용하는 것이 자명한 해법이다.
