설치 전 Setting
설치 package 목록에 ros 추가(packages.ros.org)
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'curl 설치
$ sudo apt install curlcurl로 ROS 설치 키 설정
$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -package 목록 최신으로 update
$ sudo apt updateROS1 Noetic Installation
Desktop full version 설치
$ sudo apt install ros-noetic-desktop-full설치 후 Setting
shell 확인
$ echo $SHELLshell에서 실행할 수 있도록 setting
# shell이 bash일 때 아래 명령어 실행
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc$ source ~/.bashrc
package build를 위한 도구 및 기타 종속성 설치
$ sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essentialrosdep 초기화
$ sudo rosdep initrosdep update
$ rosdep updateROS1 Noetic 설치 확인
$ roscore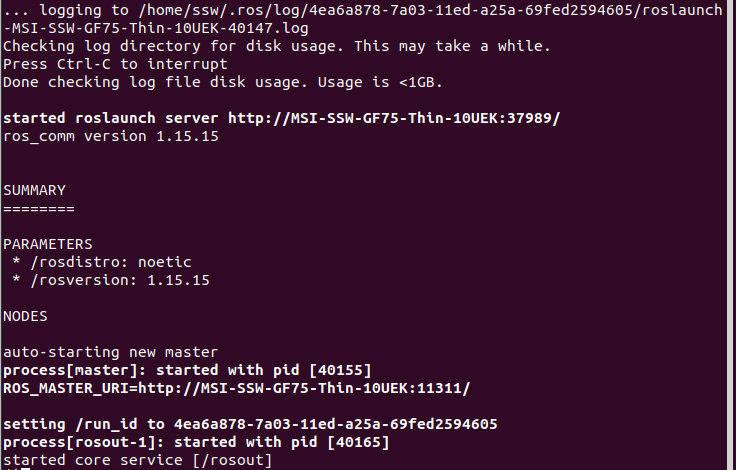
$ mkdir -p ~/catkin_ws/src$ cd catkin_ws$ catkin_make만약 Could NOT find PY_em (missing: PY_EM) error가 발생하면 아래 명령어 실행
$ pip install empy$ vim ~/.bashrc# 마지막 줄에 추가
# insert 누른 후
source ~/catkin_ws/devel/setup.bash
# esc 누른 후
# :wq
# enter
$ source ~/.bashrc
ssw