Why I am starting the Floor Detection Project?
로봇의 설치와 현장데이터 수집이라는 새로운 업무를 진행하게 되었습니다.
로봇은 SLAM 을 통해 현장에서 Mapping을 하여 OGM (Ocuupancy Grid Map)을 생성합니다.
해당 OGM 데이터를 활용하여 로봇이 어디위치에 있는지 추정할 수 있습니다.
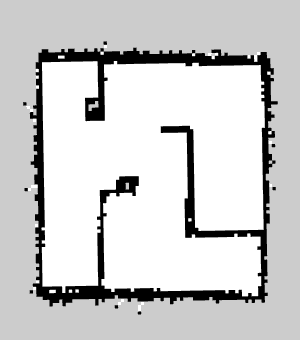
로봇이 이동가능한 구역과 이동하지 말아야할 구역이 생성되면, 이를 바탕으로 로봇은 자신의 위치를 추정(Localization)하여 이동합니다.
보통 건물은 도면 (Floor Plan) 자료를 포함합니다. 이를 후처리하여 SLAM 에서 취득한 OGM 파일과 함께 맵핑하여 사용하면, 로봇이 이동경로가 더 정확해지고 세밀하게 처리가능합니다.
Floor Plan 후처리란?
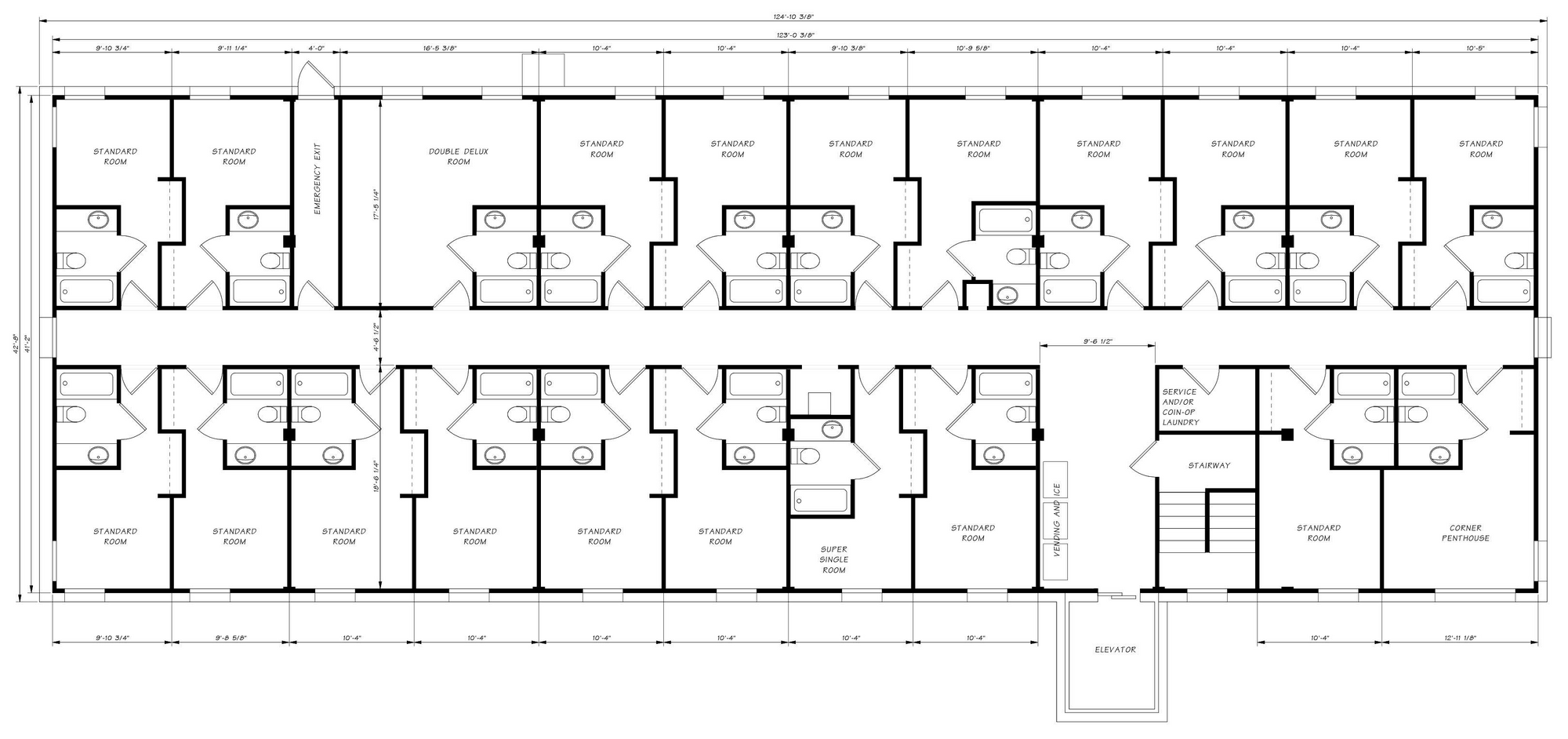
Floor Plan 후처리는, Raster Image 형태(png 또는 jpg)에서 로봇의 주행경로를 지정하는 것을 의미합니다. 아래 그림을 참고합니다.
현재 후처리는 그림판을 사용하여 수동으로 작업하지만(마우스로), 이를 딥러닝을 활용하여 자동화하는 프로젝트를 진행하려 합니다.
목표
도면의 후처리 과정을 자동화 하는 프로그램을 개발한다. 후처리란 도면 이미지로부터 로봇의 주행영역과 주행불가 영역을 나누는 작업을 뜻한다.
- 도면(pdf)에서 벽과 문의 패턴을 학습하고 추출 후 이를 OGM (Occupied Grid Map)으로 변환한다.
- 도면에서 제공되는 Scale값을 인식하고, 1cm = 5px 단위로 스케일을 조절한다.
- 조직에게 성취를 공유하여, 나의 테크니컬한 지식과 경험을 알려 사업과 개발의 신뢰를 강화한다.
큰 목표를 달성하기 위해, 작은 서브미션들을 달성하자.
- 노션활용을 통해 프로젝트 추적을 명확히 한다.
- 실제 개발자가 진행하는 것 처럼, 스프린트를 설정하고 달성한다.
- 프로젝트에 필요한 논문을 다수 읽고 소화하는것을 목적으로한다.
- 논문을 읽은 후, 노션페이지에 정리하도록 한다.
- 무조건 요약하지말고, 기본적인 템플릿을 통해 내용을 통일감있게 구성한다.
- 학기 프로젝트로 1분기 (12월)에 완성한다.
- 삽질은 괜찮지만, 효율적으로 시간을 소비하자.
학습 계획
- 프로젝트의 방향성 정의
- 관련 논문 습득 및 취득 그리고 요약 및 적용
- 필요한 기술과 지식을 습득한다.
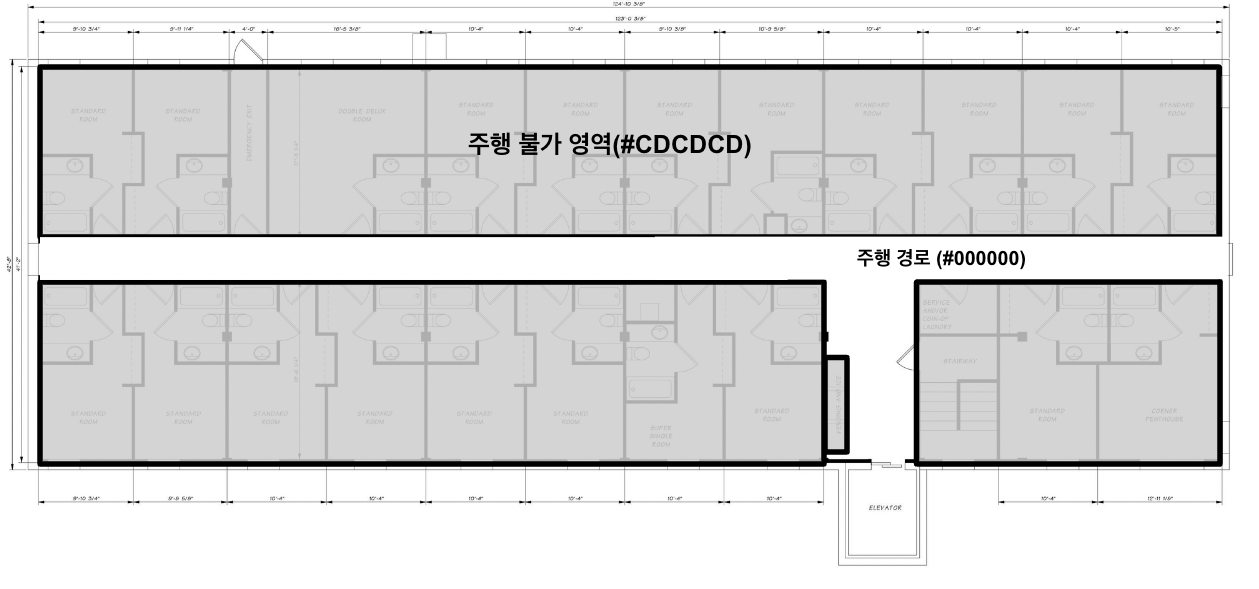
- 패턴인식, 객체 인식, Semantic Segmentation(아래 그림), 여러 딥러닝 모델 습득
논문 요약 예시
3DPlanNet: Generating 3D Models from 2D Floor Plan Images Using Ensemble Method
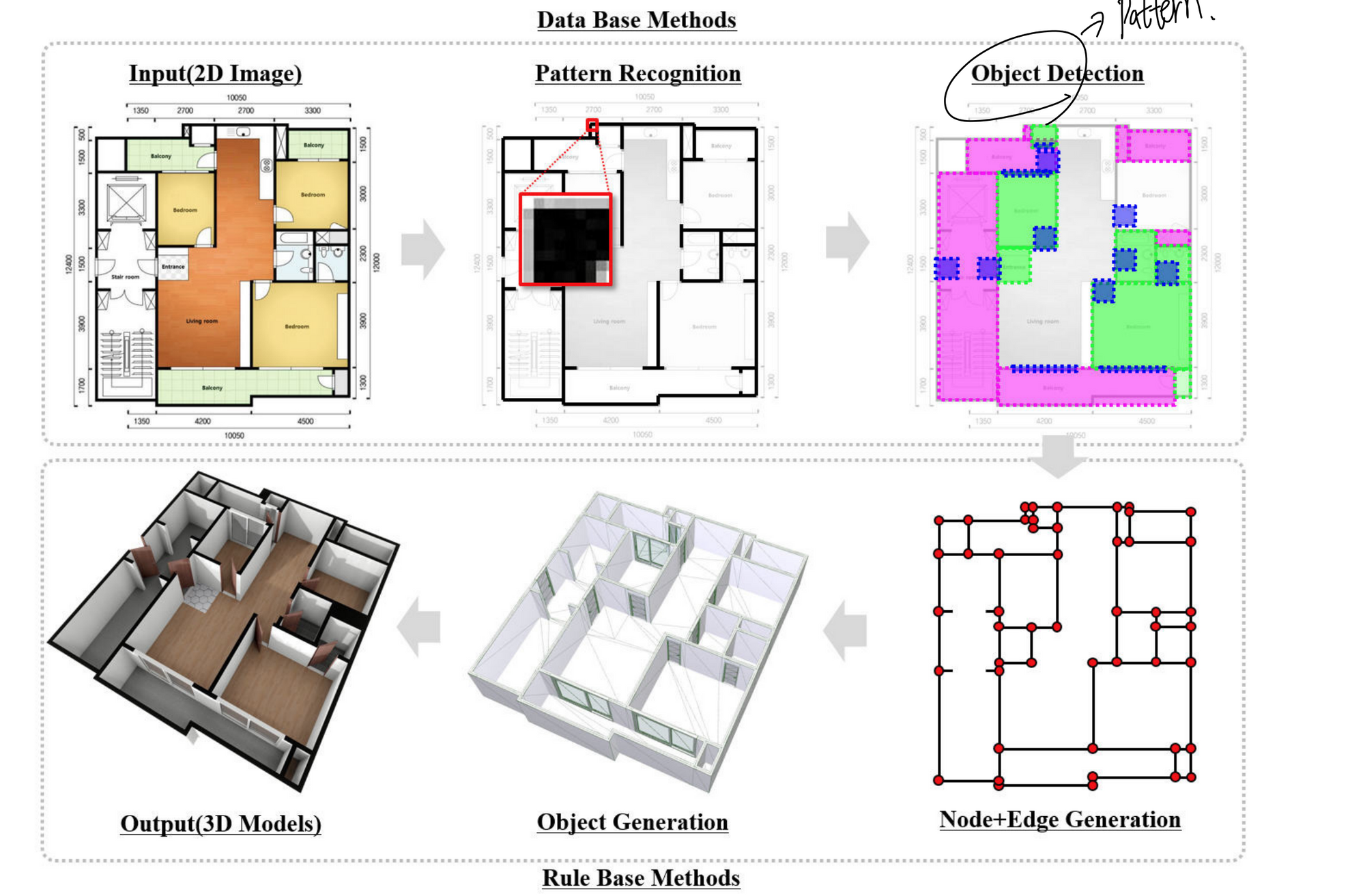
Summary
- Rule-based method (What is?)
- Small Data Learning (30 samples) to overcome a requirement to secure a large amount of data for learning.
- Wall Accuracy - 95 %
- 3DPlanNet Ensemble method to convert 2D drawings to 3D model
Keywords
- Room Detection, Accuracy & Recall & Precision (TP, TN, FP, FN)
Residential Floor Plan Recognition and Reconstruction
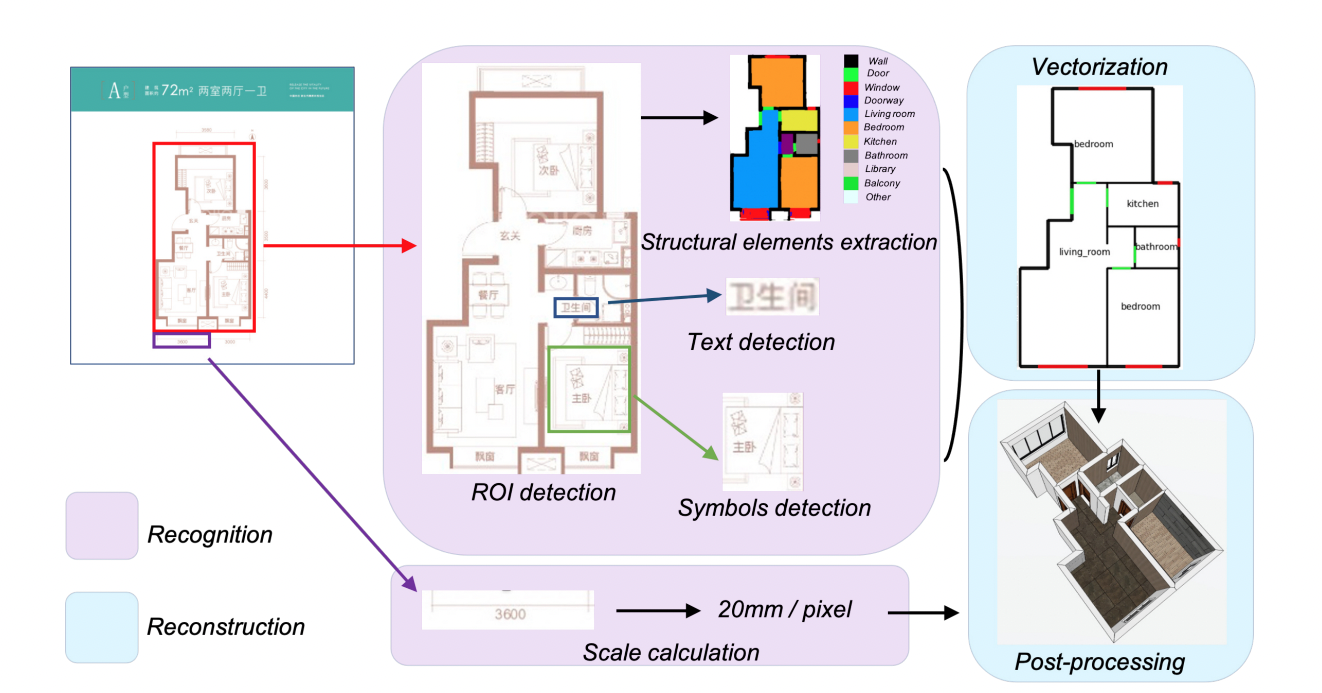
Floor Plan 패턴 인식, 추출, Vector화하는 논문. 스케일을 디텍션하여 픽셀단위로 재구성하는것이 보인다. https://openaccess.thecvf.com/content/CVPR2021/papers/Lv_Residential_Floor_Plan_Recognition_and_Reconstruction_CVPR_2021_paper.pdf
논문의 Keywords
- YOLOV4
- DeepLabv3+
- ROI (Region of Interest, 관심영역)
