학습 목표
-
레이어 개념
-
레이어 동작 방식
-
레이어 설계
-
Tensorflow 정의
데이터 형태
-
(m,n) 행렬 -> dataframe
-
(C,W,H) -> Channel , Width, Height
-
Channel : 이미지 데이터
Layer
- 정의: 하나의 물체가 여러 개의 논리적인 객체로 구성.
Linear Layer
-
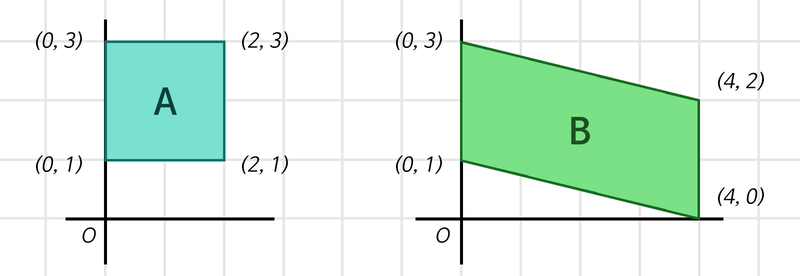
정의: 선형변환과 동일한 기능을 한다.
-
특징
1.선형변환을 통해서 특정 차원으로 데이터 변환
-
데이터가 풍부해지거나 집약시키는 효과가 있음.
2.(a,b) and (a* b) 모두 같은 행렬이다.
3.각각의 행렬들은 Weight
4.Weight의 모든 요소는 Parameter
5.Parameter의존 시 과적합이 일어난다.
6.적합한 Weight찾기 <-- 훈련!!
7.지역성 자체가 엄청 중요한 정보.
-> 만약 삭제되었을 경우 입출력 사이의 관계 가중치를 찾아야한다.
-
-
꼴: (입력의 차원, 출력의 차원)
-
bias(편향)
- 정의: 선형변환된 값에 편향 파라미터를 더해주는 것이다.
-
목적: 데이터별로 맞는 Weight 선언하자!
- 코드로 구현 1탄
## 데이터 집약시키는 코드
import tensorflow as tf
batch_size = 64
boxes = tf.zeros((batch_size, 4, 2)) # Tensorflow는 Batch를 기반으로 동작하기에,
# 우리는 사각형 2개 세트를 batch_size개만큼
# 만든 후 처리를 하게 됩니다.
print("1단계 연산 준비:", boxes.shape)
first_linear = tf.keras.layers.Dense(units=1, use_bias=False)
# units은 출력 차원 수를 의미합니다.
first_out = first_linear(boxes)
first_out = tf.squeeze(first_out, axis=-1) # (4, 1)을 (4,)로 변환해줍니다.
# (불필요한 차원 축소)
print("1단계 연산 결과:", first_out.shape)
print("1단계 Linear Layer의 Weight 형태:", first_linear.weights[0].shape)
print("\n2단계 연산 준비:", first_out.shape)
second_linear = tf.keras.layers.Dense(units=1, use_bias=False)
second_out = second_linear(first_out)
second_out = tf.squeeze(second_out, axis=-1)
print("2단계 연산 결과:", second_out.shape)
print("2단계 Linear Layer의 Weight 형태:", second_linear.weights[0].shape)- 코드 구현 2탄

## 데이터 풍부
import tensorflow as tf
batch_size = 64
boxes = tf.zeros((batch_size, 4, 2))
print("1단계 연산 준비:", boxes.shape)
first_linear = tf.keras.layers.Dense(units=3, use_bias=False)
first_out = first_linear(boxes)
print("1단계 연산 결과:", first_out.shape)
print("1단계 Linear Layer의 Weight 형태:", first_linear.weights[0].shape)
print("\n2단계 연산 준비:", first_out.shape)
second_linear = tf.keras.layers.Dense(units=1, use_bias=False)
second_out = second_linear(first_out)
second_out = tf.squeeze(second_out, axis=-1)
print("2단계 연산 결과:", second_out.shape)
print("2단계 Linear Layer의 Weight 형태:", second_linear.weights[0].shape)
print("\n3단계 연산 준비:", second_out.shape)
third_linear = tf.keras.layers.Dense(units=1, use_bias=False)
third_out = third_linear(second_out)
third_out = tf.squeeze(third_out, axis=-1)
print("3단계 연산 결과:", third_out.shape)
print("3단계 Linear Layer의 Weight 형태:", third_linear.weights[0].shape)
total_params = \
first_linear.count_params() + \
second_linear.count_params() + \
third_linear.count_params()
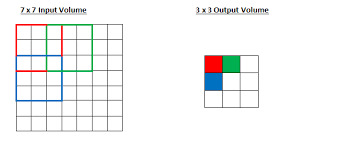
print("총 Parameters:", total_params)Convolution Layer
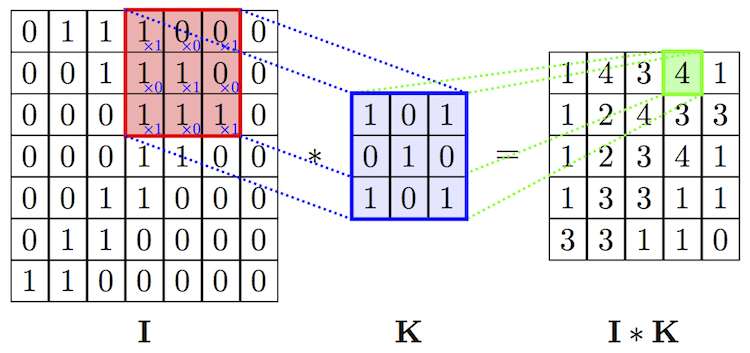
- Convolution이란?
: 하나의 함수와 또 다른 함수를 곱한 후 그 구간에 대하여 적분하여 새로운 함수를 구하는 것. --> 필터와 이미지가 겹치는 부분에 Conv연산을 하면 새롭게 변형된 이미지를 얻을 수 있게 됩니다.
-
효과
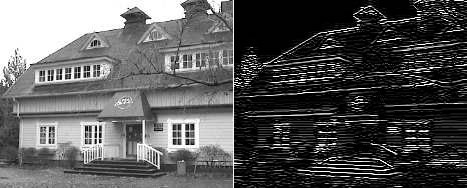
- image detection
- Blur처리
- Simple box

- Gaussian

-
Edge detection

-
The Sobel Edge Operator

- The laplacian operator

- The Laplacian of Gaussian

- image detection
-
Conv 연산
: 입력의 형태를 변형시킨다.
-
stride: 보폭
-
padding쓰는 이유
-
stride가 크거나 혹은 필터가 커서 제대로Convoluation연산이 되지 않게 되는 것을 방지함.
-
보통은 filter을 이용하면 input이미지가 작아지게 될 수밖에 없으나 zero-padding를 이용하면 이미지의 크기가 유지가 됩니다.
-
Conv이후 아웃풋 이미지 크기 유지
-
Edge쪽 픽셀정보 더 활용하기 위해서이다.
-
-
구성:[필터의 개수 필터의 가로 필터의 세로]로 이루어진 Weight.
-
특징
- 입력 정보를 집약 시킴(by 여러 개의 레이어 중첩)
- 최종 Linear가 작아져서 최적화가 가능함
- 지역성 정보가 온전히 보전히 되기에 인접한 픽셀들 사이의 패턴만 추출하면 불필요한 연산 제거 및 정확한 계산이 가능하다.
-
문제점
- 필터가 object detectino을 담기에 작을 수 있다
- stride사이즈로 인해서 파라미터는 줄어드나 object 필터 경계선에 걸려 인식을 못할 가능성도 있다.
- 극단적으로 필터사이즈와 이미지를 같게하면 Linear Layer가 된다. 그리고 그로 인해 연산량이 증가하여Accuracy 감소.
-
코드로 구현
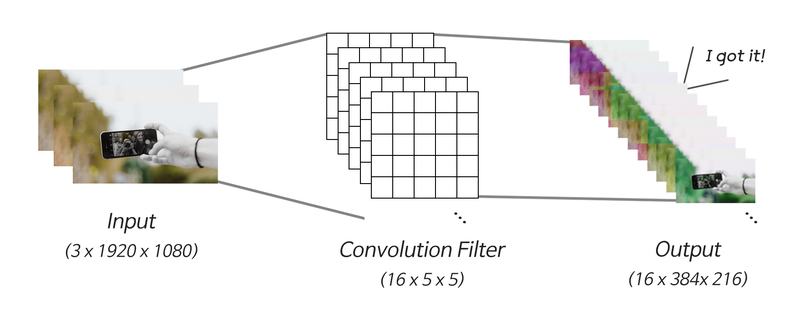
import tensorflow as tf
batch_size = 64
pic = tf.zeros((batch_size, 1920, 1080, 3))
print("입력 이미지 데이터:", pic.shape)
conv_layer = tf.keras.layers.Conv2D(filters=16,
kernel_size=(5, 5),
strides=5,
use_bias=False)
conv_out = conv_layer(pic)
print("\nConvolution 결과:", conv_out.shape)
print("Convolution Layer의 Parameter 수:", conv_layer.count_params())
flatten_out = tf.keras.layers.Flatten()(conv_out)
print("\n1차원으로 펼친 데이터:", flatten_out.shape)
linear_layer = tf.keras.layers.Dense(units=1, use_bias=False)
linear_out = linear_layer(flatten_out)
print("\nLinear 결과:", linear_out.shape)
print("Linear Layer의 Parameter 수:", linear_layer.count_params())Pooling Layer
Receptive Field
- Process: NN이 충분한 정보를 얻기 위해 커버하는 입력데이터의 수용영역으로 이 부분이 충분히 커야하고 입력 데이터 안에 object의 특성이 포함 되어야함
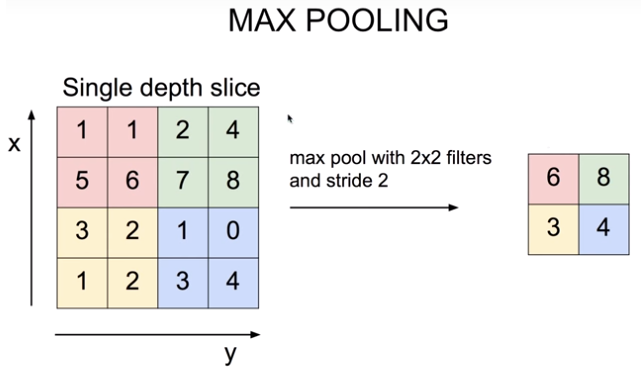
MAX POOLING
-
정의;효과적으로 Receptive Field를 키우고 그로 인해 정보 집약 효과가 극대화가 되고 필터 사이즈는 0입니다.
-
특징: 가장 큰 대표영역 뽑고 나머지는 무시합니다.
왜 MAX POOLING는 Accuracy 저하X
- translational invariance효과
: 시프트 효과가 일어나도 동일한 특징을 안정적으로 잡아내어서 오버피팅 방지 및 안정적인 특징 추출 효과
- 비선형 함수가 갖고 있는 추출 효과를 가짐
: 하위 레이어의 연산 결과는 무시하나 상위 레이어 추출하여 올려서 성능 증진.
- Receptive Field 극대화.
: 레이어를 많이 쌓으면 오버피팅, 연상량 증가, 기울기 손실등의 문제가 발생하지만 그것을 해결함.
Deconvolution Layer
Auto Encoder
-
정의: Convolution결과를 역재생하여 원본 복원
-
만드는 순서
- import 패키지 and load MNIST Dataset
## 이미지 복원을 할 것이기 때문에 y_train, y_test를 사용하지 않고
## x_train의 라벨이 x_train자신이 된다.
import numpy as np
from tensorflow.python.keras.layers import Input, Dense, Conv2D, MaxPooling2D, UpSampling2D
from tensorflow.python.keras.models import Model
from tensorflow.python.keras.datasets import mnist
import json
import matplotlib.pyplot as plt #for plotting
# MNIST 데이터 로딩
(x_train, _), (x_test, _) = mnist.load_data() # y_train, y_test는 사용하지 않습니다.
x_train = np.expand_dims(x_train, axis=3)
x_test = np.expand_dims(x_test, axis=3)
x_train = x_train.astype('float32') / 255.
x_test = x_test.astype('float32') / 255.- Auto Encoder Model 구성
# 모델 구성
# AutoEncoder 모델 구성 - Input 부분
input_shape = x_train.shape[1:]
input_img = Input(shape=input_shape)
# AutoEncoder 모델 구성 - Encoder 부분
encode_conv_layer_1 = Conv2D(16, (3, 3), activation='relu', padding='same')
encode_pool_layer_1 = MaxPooling2D((2, 2), padding='same')
encode_conv_layer_2 = Conv2D(8, (3, 3), activation='relu', padding='same')
encode_pool_layer_2 = MaxPooling2D((2, 2), padding='same')
encode_conv_layer_3 = Conv2D(4, (3, 3), activation='relu', padding='same')
encode_pool_layer_3 = MaxPooling2D((2, 2), padding='same')
encoded = encode_conv_layer_1(input_img)
encoded = encode_pool_layer_1(encoded)
encoded = encode_conv_layer_2(encoded)
encoded = encode_pool_layer_2(encoded)
encoded = encode_conv_layer_3(encoded)
encoded = encode_pool_layer_3(encoded)
# AutoEncoder 모델 구성 - Decoder 부분
# Conv2D: shape를 변화시키지 않는다.
## MaxPooling2D만 output Shape변화
decode_conv_layer_1 = Conv2D(4, (3, 3), activation='relu', padding='same')
decode_upsample_layer_1 = UpSampling2D((2, 2))
decode_conv_layer_2 = Conv2D(8, (3, 3), activation='relu', padding='same')
decode_upsample_layer_2 = UpSampling2D((2, 2))
decode_conv_layer_3 = Conv2D(16, (3, 3), activation='relu')
decode_upsample_layer_3 = UpSampling2D((2, 2))
decode_conv_layer_4 = Conv2D(1, (3, 3), activation='sigmoid', padding='same')
# upsampling2d를 거쳐서 최종 출력 28 * 28 사이즈가 나온다
#upsampling2d를 거친다
decoded = decode_conv_layer_1(encoded) # Decoder는 Encoder의 출력을 입력으로 받습니다.
decoded = decode_upsample_layer_1(decoded)
decoded = decode_conv_layer_2(decoded)
decoded = decode_upsample_layer_2(decoded)
decoded = decode_conv_layer_3(decoded)
decoded = decode_upsample_layer_3(decoded)
decoded = decode_conv_layer_4(decoded)
# AutoEncoder 모델 정의
autoencoder = Model(input_img, decoded)
autoencoder.summary()- 모델 훈련
## 이미지 생성
x_test_10 = x_test[:10] # 테스트 데이터셋에서 10개만 골라서
x_test_hat = autoencoder.predict(x_test_10) # AutoEncoder 모델의 이미지 복원생성
x_test_imgs = x_test_10.reshape(-1, 28, 28)
x_test_hat_imgs = x_test_hat.reshape(-1, 28, 28)
plt.figure(figsize=(12,5)) # 이미지 사이즈 지정
for i in range(10):
# 원본이미지 출력
plt.subplot(2, 10, i+1)
plt.imshow(x_test_imgs[i])
# 생성된 이미지 출력
plt.subplot(2, 10, i+11)
plt.imshow(x_test_hat_imgs[i])Decoder Layers for Reconstruction
: 실제로 역연산을 통해서 이미지를 복원
Upsampling 레이어
- Nearest Neighbor : 복원해야 할 값을 가까운 값으로 복제한다.
- Bed of Nails : 복원해야 할 값을 0으로 처리한다.
- Max Unpooling : Max Pooling 때 버린 값을 복원한다.
Transposed Convolution
- 코드로 구현
from tensorflow.python.keras.layers import Conv2DTranspose
# Conv2DTranspose를 활용한 AutoEncoder 모델
# AutoEncoder 모델 구성 - Input 부분
input_shape = x_train.shape[1:]
input_img = Input(shape=input_shape)
# AutoEncoder 모델 구성 - Encoder 부분
encode_conv_layer_1 = Conv2D(16, (3, 3), activation='relu')
encode_pool_layer_1 = MaxPooling2D((2, 2))
encode_conv_layer_2 = Conv2D(8, (3, 3), activation='relu')
encode_pool_layer_2 = MaxPooling2D((2, 2))
encode_conv_layer_3 = Conv2D(4, (3, 3), activation='relu')
encoded = encode_conv_layer_1(input_img)
encoded = encode_pool_layer_1(encoded)
encoded = encode_conv_layer_2(encoded)
encoded = encode_pool_layer_2(encoded)
encoded = encode_conv_layer_3(encoded)
# AutoEncoder 모델 구성 - Decoder 부분 -
decode_conv_layer_1 = Conv2DTranspose(4, (3, 3), activation='relu', padding='same')
decode_upsample_layer_1 = UpSampling2D((2, 2))
decode_conv_layer_2 = Conv2DTranspose(8, (3, 3), activation='relu', padding='same')
decode_upsample_layer_2 = UpSampling2D((2, 2))
decode_conv_layer_3 = Conv2DTranspose(16, (3, 3), activation='relu')
decode_upsample_layer_3 = UpSampling2D((2, 2))
decode_conv_layer_4 = Conv2DTranspose(1, (3, 3), activation='sigmoid', padding='same')
decoded = decode_conv_layer_1(encoded) # Decoder는 Encoder의 출력을 입력으로 받습니다.
decoded = decode_upsample_layer_1(decoded)
decoded = decode_conv_layer_2(decoded)
decoded = decode_upsample_layer_2(decoded)
decoded = decode_conv_layer_3(decoded)
decoded = decode_upsample_layer_3(decoded)
decoded = decode_conv_layer_4(decoded)
# AutoEncoder 모델 정의
autoencoder = Model(input_img, decoded)
autoencoder.summary()