Convolution Neural Network
- CNN을 쓰는 이유
일반적인 Deep Neural Network(DNN)은 기본적으로 1차원 데이터를 입력데이터로 사용한다. 반면 이미지 데이터는 2차원 형태의 입력 데이터로 DNN에서 사용하기 위해서는 1차원 데이터 형태로 만들어야하는 데 이 과정에서 이미지의 공간적/지역적 정보(spatial/topological information)가 손실되게 된다. 또한 추상화 과정없이 바로 연산 과정이 진행되기 때문에 학습시간과 효율성이 저하된다.
그래서 이러한 문제점을 해결한 것이 Convolution Neural Network(CNN)이다.
CNN은 이미지를 입력 데이터로 그대로 받기 때문에 공간적/ 지역적 정보를 유지한 채로 특성(feature)들의 계층을 빌드업한다. 그리고 CNN의 중요한 특징은 이미지의 전체보다는 부분을 보는 것, 그리고 이미지의 한 픽셀과 주변 픽셀의 연관성을 살리는 것이다.
- 어떤 식으로 CNN이 쓰이는지 예시
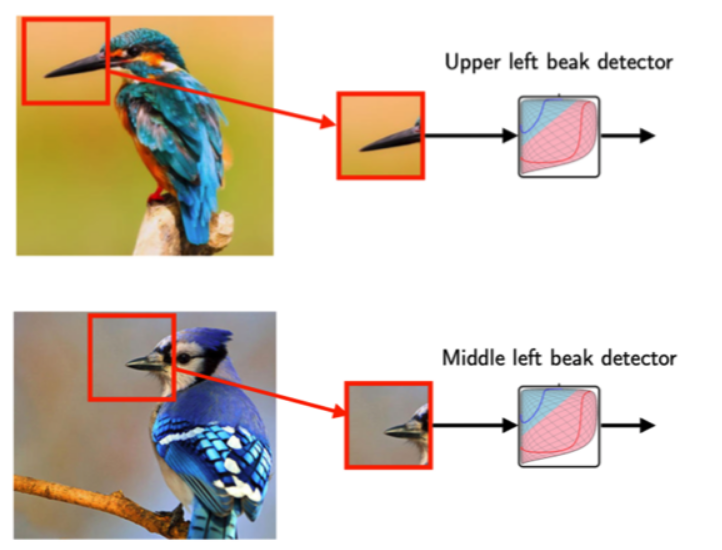
이미지가 주어졌을 때 새의 이미지가 맞는지 결정하는 모델을 만들 경우, 새의 부리가 중요한 특징이 될 수 있다. 모델은 이미지에 새의 부리가 있는지 없는지를 확인하는 것이 중요한 척도가 될 것이다. 하지만 전체 이미지에서 새의 부리는 일부분으로 전체 이미지를 보는 것보다 새의 부리가 있는 이미지를 잘라보는 것이 더 효율적이다. 또한 위의 두 이미지에서 새의 부리 부분은 이미지에 다른 위치에 있어 전체 이미지 보다는 이미지 일부분을 확인하는 것이 중요하고 효율적이다.
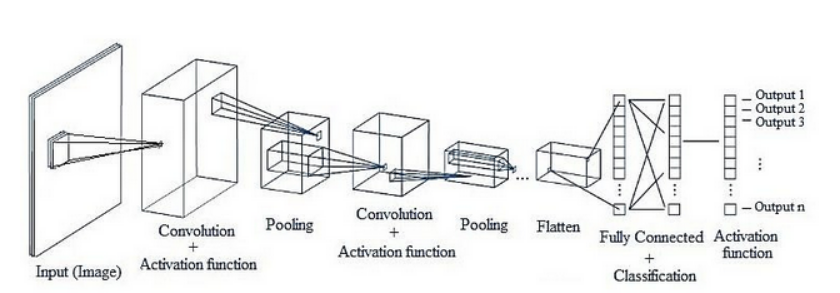
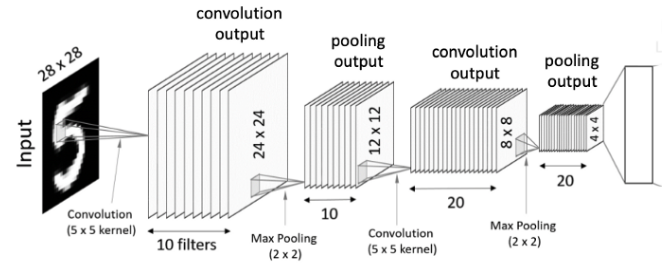
Convolution Neural Network의 전체적인 네트워크 구조
1. Convolution Layer
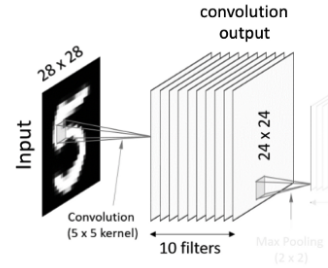
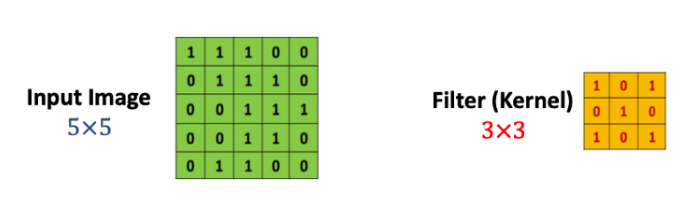
5x5 사이즈 입력 이미지가 있을 때 필터(filter)를 반복 적용하여 패턴을 찾아 처리한다. 입력 이미지와 필터의 합성곱을 하여 특징을 찾아내는 것
필터는 이미지의 특징을 찾아내기 위한 공용 파라미터이다. 필터 또는 커널(Kernel)이라고도 한다.
스트라이드(stride)는 필터를 순회하는 간격이다. 위에서 stride는 1이다.
stride값이 커질 경우 필터가 이미지를 건너뛰는 칸이 커짐을 의미하므로 결과 이미지의 크기는 작아지는 것을 의미한다.
입력 이미지 사이즈 : hx , wx
필터 사이즈 : hy, wy
스트라이드 : s
결과값 : ( ( hx - hy ) / s + 1) x ( ( wx - wy ) / s + 1)
Zero Padding : 위에서 보면 입력 이미지와 필터의 합성곱 결과는 입력 이미지 사이즈보다 작아지는 것을 확인할 수 있다. 즉, 손실되는 부분이 발생한다. 이러한 문제점을 해결하기 위해서 0으로 구성된 테두리를 이미지 가장자리에 감싸준다.
- Convolution 후 아웃풋 이미지의 크기를 유지할 수 있다.
- Edge 쪽 픽셀 정보를 더 잘 이용할 수 있다.
Chennel : 이미지 픽셀 하나 하나는 실수이다. 컬러 사진은 색을 표현하기 위해서 각 픽셀을 RGB 3개의 실수로 표현한 3차원 데이터이다. 컬러 이미지는 3개의 채널, 흑백 이미지는 1개의 채널로 구성된다.
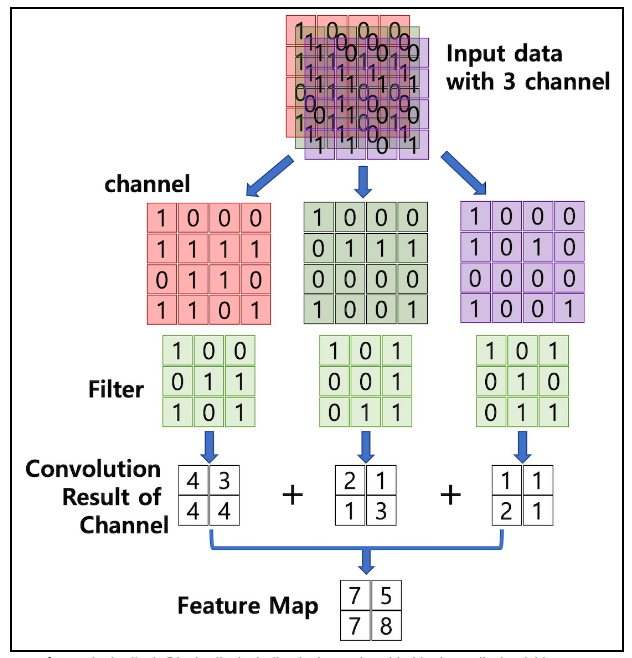
Feature Map : 입력 데이터를 필터가 순회하며 합성곱을 통해서 만든 결과이다.
Activation Map : Feature Map에 활성함수를 적용한 결과이다. 즉, Convolution layer의 최종 결과물이다.
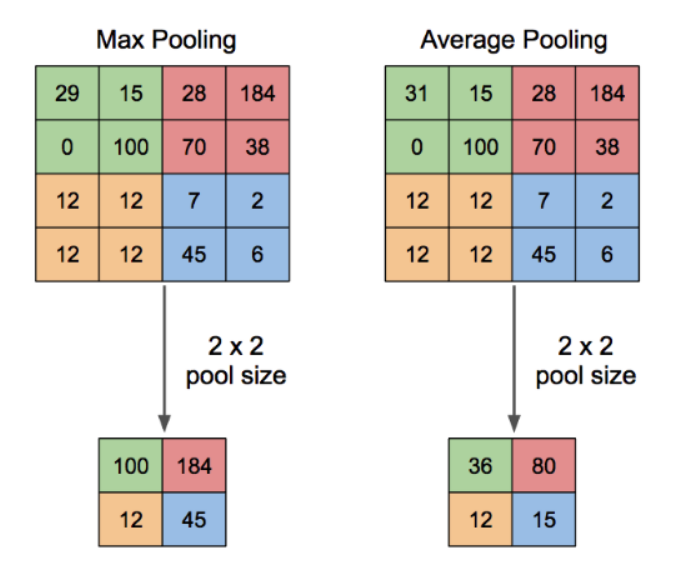
2. Pooling Layer
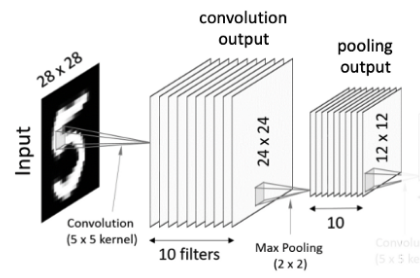
Convolution layer의 결과 10개의 필터가 10개의 feature map을 생성하게 되어 값이 너무 많아지는 문제가 발생하게 된다.
이 문제를 해결하기 위해 각 feature map의 차원을 축소합니다.
pooling size = ( input_size - pool_size )/stride + 1
오버 피팅을 줄여주고 연산 속도를 올려준다.
대표적으로 2가지 방식이 있다.
3. Flatten ( Vectorization )
- Flatten 또는 Vectorization : pooling 결과 4x4x20의 텐서가 출력되고 이 텐서를 1차원 데이터 펼쳐준다.
- pooling 결과는 이미지라기 보다 입력된 이미지에서 얻어온 특이점 데이터기 때문에 1차원 형태로 변형시켜도 무관한 상태가 된다.
4. Fully Connected Layers
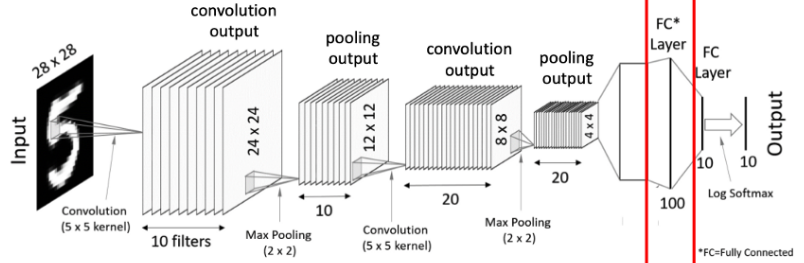
- 마지막에 하나 이상의 Fully connected layer를 적용시키고 softmax 활성함수 적용해주면 최종 결과물 출력.
부록 튜닝가능한 하이퍼 파라미터
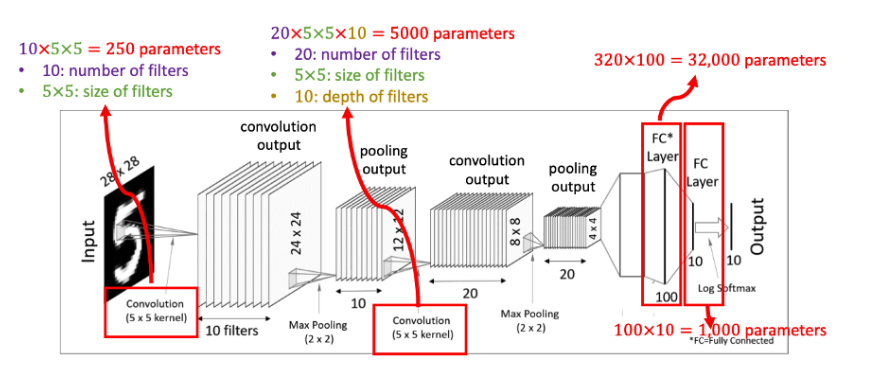
- Convolutional layers: 필터의 갯수, 필터의 크기, stride값, zero-padding의 유무
- Pooling layers: Pooling방식 선택(MaxPool or AvgPool), Pool의 크기, Pool stride 값(overlapping)
- Fully-connected layers: 넓이(width)
- 활성함수(Activation function): ReLU(가장 주로 사용되는 함수), SoftMax(multi class classification), Sigmoid(binary classification)
아래는 손실함수, 옵티마이저
- Loss function: Cross-entropy for classification, L1 or L2 for regression
- 최적화(Optimization) 알고리즘과 이것에 대한 hyperparameter(보통 learning rate): SGD(Stochastic gradient descent), SGD with momentum, AdaGrad, RMSprop
- Random initialization: Gaussian or uniform, Scaling