스칼라와 벡터
스칼라
- 상수라고 생각하면 된다. 보통 소문자 의 형태로 표기한다.
벡터
- 1) 크기와 방향을 가진 값. 기하학적인 관점.
- 2) 나열된 숫자의 리스트. 하나의 데이터 값으로 생각하면 된다.
벡터는 소문자 등으로 표기하거나 등으로 표기한다.
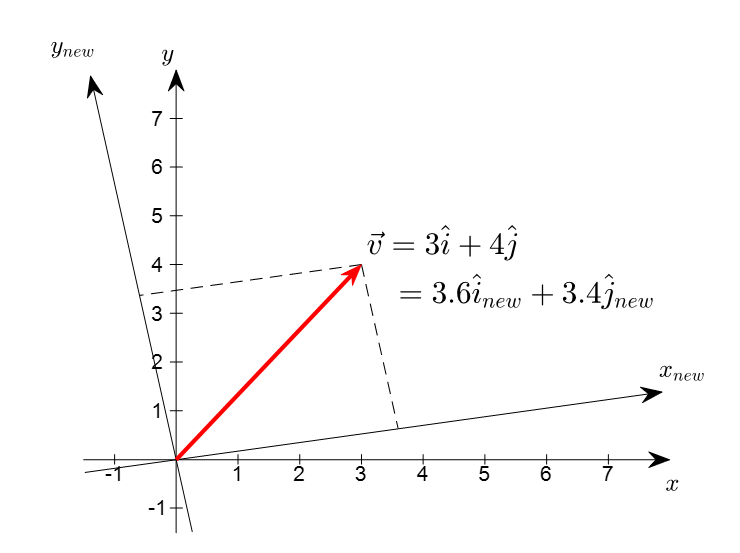
(출처: https://angeloyeo.github.io/2020/09/07/basic_vector_operation.html)
벡터는 위 두 정의 중 어느 것으로 바라보느냐에 따라 헷갈리기 쉽다.
좌표계가 바뀌어도 벡터는 그대로지만 (=불변성, invariance)
좌표계가 바뀌면 벡터의 성분은 바뀐다. (=가변적, variant)
열벡터
- 행렬의 열을 벡터로 보는 관점.
행렬은 기본적으로 열벡터를 기준으로 표기한다.
행벡터
- 행렬의 행을 벡터로 보는 관점.
열벡터를 행벡터로 표기할 때는 전치행렬처럼 와 같이 표기한다.
행렬과 벡터의 계산
행렬의 표기
- 와 같이 표기한다. 은 행, 은 열이다.
- 는 번째 행의 번째 열에 있는 원소이고, 는 번째 열벡터, 는 번째 행벡터이다.
행렬의 덧셈과 곱셈
- 행렬 에 대해 는 각 원소끼리 덧셈
- 스칼라 에 대해 는 각 행렬 또는 벡터의 각 원소(성분)에 바로 곱셈
행렬곱
- 행렬 에 대해 형태로 표기한다.
- 교환법칙이 성립하지 않는다.
- 결합법칙, 분배법칙은 성립한다.
- , 이 성립한다.
내적과 외적
내적과 외적은 서로 상관없는 연산이며,
외적은 벡터곱(cross product)과 선형대수학에서 사용하는 텐서곱(outer product)
2가지 종류가 있어서 헷갈리기 쉽다.
내적(dot product)
-
내적은 두 벡터의 각 성분끼리 곱한 것의 합이다.
-
형태로 표기하며, 결과값은 스칼라이다.
-
교환법칙이 성립한다.
-
이다.
-
두 벡터의 내적값으로 두 벡터가 얼마나 같은 방향을 향하는지 (=유사한지) 알 수 있다.
벡터끼리의 내적은 행렬끼리의 행렬곱으로 표현할 수 있다.
즉, 가 성립하며, 결과값은 스칼라이다.
(예시)
즉, 행렬의 각 원소는 재료벡터의 각 성분끼리의 내적값이다.
이 성질을 가지고 공분산행렬을 만들 수 있다.
벡터곱(cross product)
-
벡터곱은 두 벡터 에 대해 서로 수직인 벡터를 구하는 연산이다.
-
형태로 표기한다.
-
교환법칙이 성립하지 않는다.
-
의 크기는 이고, 결과값은 벡터이다. (는 두 벡터가 이루는 각의 크기)
-
일 때, 이다.
자세히 보면 벡터곱의 각 성분은 행렬식(판별식) 와 같다는 것을 알 수 있다.
행렬식이 0이면 해가 없거나 무수히 많고, 0이 아니면 반드시 단 하나의 해가 존재한다.
이러한 성질을 여러 가지 방면으로 활용할 수 있다.
예를 들어 두 3차원 벡터의 벡터곱이 영벡터라면 두 벡터는 평행하다.
텐서곱(outer product)
-
텐서곱은 두 벡터의 행렬곱 연산이다.
-
형태로 표기한다.
-
교환법칙이 성립하지 않는다. (결합법칙은 성립함)
-
이며, 결과값은 행렬이다.
내적과 동일한 행렬곱 형태로 표현할 수 있지만 행렬의 모양이 다르다는 것을 기억하자.
모양의 벡터라면 텐서곱 결과는 의 모양을 갖는 행렬이 된다. -
텐서곱의 주대각합은 내적과 같다.
선형성의 의미
어떤 것이 선형이라는 것은 쉽게 말해 작은 조각들로 쪼갤 수 있다는 것이다.
바꿔 말하면 작은 조각들을 합쳐서 큰 조각을 만들 수도 있다는 의미가 된다.
선형의 수학적 정의는 다음과 같다.
동일한 체 에서 정의된 벡터공간 에 대해 정의된 함수 가 다음 두 조건을 만족하면 선형변환(Linear transformation) 또는 일차변환(First-order transformation)이라 정의한다.
1) 중첩의 원리 (superposition)
2) 동질성 (homogenuous)
선형변환을 줄여서 간단하게 선형 또는 로 표기하기도 한다.
이게 신경망에서 무슨 역할을 하는지는 링크에 간단하게 설명돼 있다.
선형성의 성질
가 선형이면 다음과 같은 성질을 갖는다.
1) 모든 에 대해
2) 모든 에 대해
3) 모든 에 대해
4) 와 에 대해
1번과 2번은 선형성의 정의와 같다.
3번을 직해하면 영벡터를 선형변환한 것은 영벡터라는 것인데,
쉽게 말해서 모든 선형함수는 반드시 원점을 지나야 한다는 의미가 된다.
