[출처]https://cafe.naver.com/openrt/24274
018 ROS 2의 좌표 표현
-로봇의 센서로서 널리 사용되는 카메라의 경우 좌표 표현이 다름
#컴퓨터 비전 분야에서 널리 사용되는 z forward, x right, y down를 기본 좌표계로 사용
#로봇은 기본적으로 x forward, y left, z up를 기본 좌표계로 사용
<ROS2 좌표 표현의 기본 규칙>
-오른손 법칙을 따라 사용!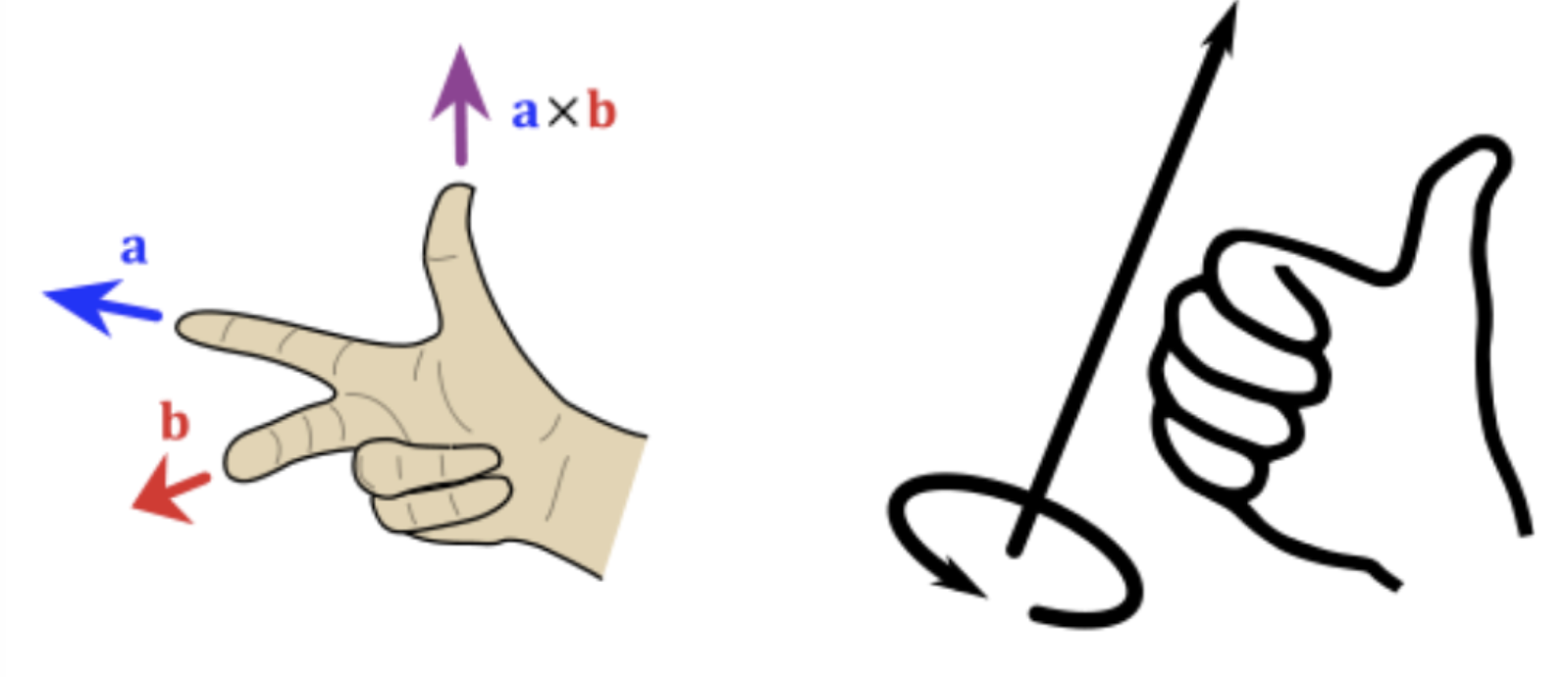
<ROS2 축 방향(Axis Orientation) 규칙>
1)기본 3축
-축 방향 (Axis Orientation)으로 x forward, y left, z up 을 사용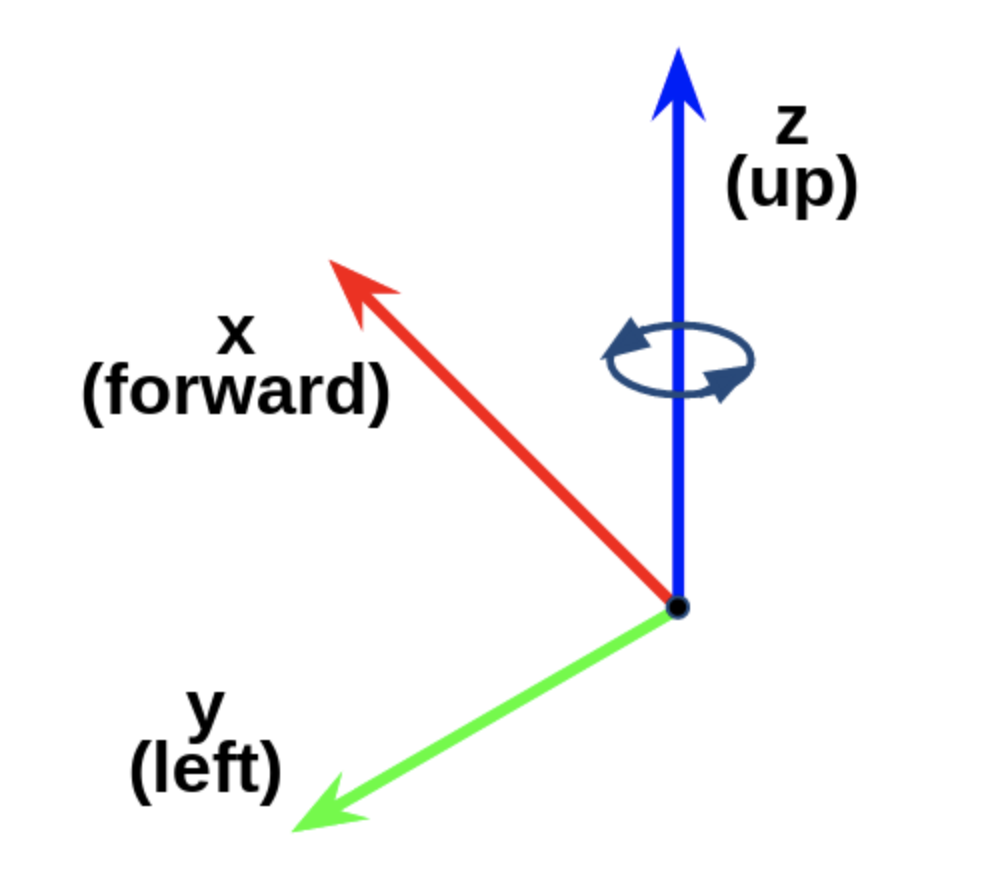
2) ENU(east north up) 좌표
-지리적 위치를 표현
-야외에서 많이 사용
3) 접미사 프레임 사용 (Suffix Frames)
3-1) _optical 접미사
-컴퓨터 비전 분야의 경우, 카메라 좌표계로 많이 사용되는 z forward, x right, y down를 사용하게 되는데 이럴 경우에는 카메라 센서의 메시지에 _optical 접미사를 붙여 구분
-카메라 좌표계 <-> 로봇 좌표계 transform 필요
3-2) _ned 접미사
-NED (north east down) 좌표계
<ROS 2의 좌표 표현의 회전 표현(Rotation Representation) 규칙>
1) 쿼터니언 (quaternion)
- 간결한 표현방식으로 가장 널리 사용됨 (x, y, z, w)
- 특이점 없음 (No singularities)
2) 회전 매트릭스 (rotation matrix)
- 특이점 없음 (No singularities)
3) 고정축 roll, pitch, yaw (fixed axis roll, pitch, yaw about X, Y, Z axes respectively)
